(54) МЕХАНИЗМ ШАГАНИЯ
| название | год | авторы | номер документа |
|---|---|---|---|
| Механизм шагания тяжелых машин | 1973 |
|
SU844699A1 |
| КОЛЕСНО-ШАГАЮЩИЙ ДВИЖИТЕЛЬ С ФУНКЦИЕЙ АКТИВНОЙ ПОДВЕСКИ | 2017 |
|
RU2671661C1 |
| МУСКУЛЬНЫЙ ПРИВОД ТРАНСПОРТНОГО СРЕДСТВА | 1999 |
|
RU2156713C1 |
| ДИФФЕРЕНЦИАЛЬНЫЙ КРИВОШИПНЫЙ ПРЕОБРАЗУЮЩИЙ МЕХАНИЗМ ПРИВОДА СТАНКА-КАЧАЛКИ | 2005 |
|
RU2303182C2 |
| УГЛЕДОБЫВАЮЩИЙ БАРАБАННЫЙ КОМБАЙН ДОЛИНСКОГО БКД, СПОСОБ ПОГРУЗКИ УГЛЯ НА КОНВЕЙЕР, БАРАБАННЫЙ ИСПОЛНИТЕЛЬНЫЙ ОРГАН ОЧИСТНОГО КОМБАЙНА, МЕХАНИЗМ ПОДЪЕМА ИСПОЛНИТЕЛЬНОГО ОРГАНА КОМБАЙНА, МЕХАНИЗМ ПОВЫШЕНИЯ УСТОЙЧИВОСТИ КОМБАЙНА, МЕХАНИЗМ ПОДАЧИ КОМБАЙНА | 2001 |
|
RU2244124C2 |
| ДИФФЕРЕНЦИАЛЬНЫЙ КРИВОШИПНЫЙ МЕХАНИЗМ ПРИВОДА ШТАНГОВОГО СКВАЖИННОГО НАСОСА | 2002 |
|
RU2246650C2 |
| Шагающее колесо транспортного средства | 1985 |
|
SU1303442A1 |
| МЕХАНИЗМ ПРИВОДА НАСОСА | 1992 |
|
RU2035616C1 |
| Колесно-шагающий движитель | 1975 |
|
SU552232A1 |
| МНОГОФУНКЦИОНАЛЬНАЯ ПРЕОБРАЗУЕМАЯ ТРАНСПОРТНАЯ МАШИНА ДЛЯ ОБРАБОТКИ ПОЧВЫ | 1999 |
|
RU2218684C2 |
Изобретение относится к ходовому оборудованию тяжелых машин, например землеройных.
Известен механизм шагания, который представляет кривошипно-рычажный четырехзвенный механизм и включает раму, опорные лыжи, ноги, кривошипные валы, являюш.иеся выходными валами приводов и приводы. При перешагивании машина опирается на две лыжи и кромку базы, которой она волочится по грунту 1.
Механизм не приспособлен к работе на поверхностях с уклоном более 1°, так как плохо воспринимает поперечные усилия. Волочение базы по грунту создает дополнительные нагрузки на узлы машины.
Известен также механизм шагания, который представляет спаренный кривошипнорычажный четырехзвенный механизм и дополнительно включает разгрузочный рычаг и криволинейные направляюшие, воспринимаюшие поперечные усилия, возникаюшие в звеньях. Механизм имеет более развитые лыжи, связанные с рамой четырьмя четырехзвенниками 2. Перешагивание происходит с отрывом базы от грунта, однако механизм обеспечивает перешагивание с траекторией, нерегулируемой по величине.
Наиболее близким к предлагаемому является механизм шагания, который включает раму, опорные лыжи, ноги, кривошипные валы, являюшиеся выходными валами приводов, планетарные редукторы, эпициклические колеса которых жестко посажены в расточках ног, и тяговые рычаги с разгрузоч ными роликами. Механизм обеспечивает передвижку машины с регулируемой траекторией шагания 3.
Недостатком известного механизма является значительный подъем лыж и базы при перешагивании, имеюший порядок 1/3 шага передвижки, что приводит к излишним энергозатратам.
Цель изобретения - снижение энергозатрат шагания путем уменьшения высоты поднятия базы.
20
Поставленная цель достигается тем, что в механизме шагания, включаюшем раму, опорные лыжи, ноги, в расточках которых установлены планетарные редукторы с центральными шестернями и тяговые рычаги с разгрузочными роликами, ноги снабжены приводами, выходные валы которых соединены с центральными шестернями планетарных редукторов.
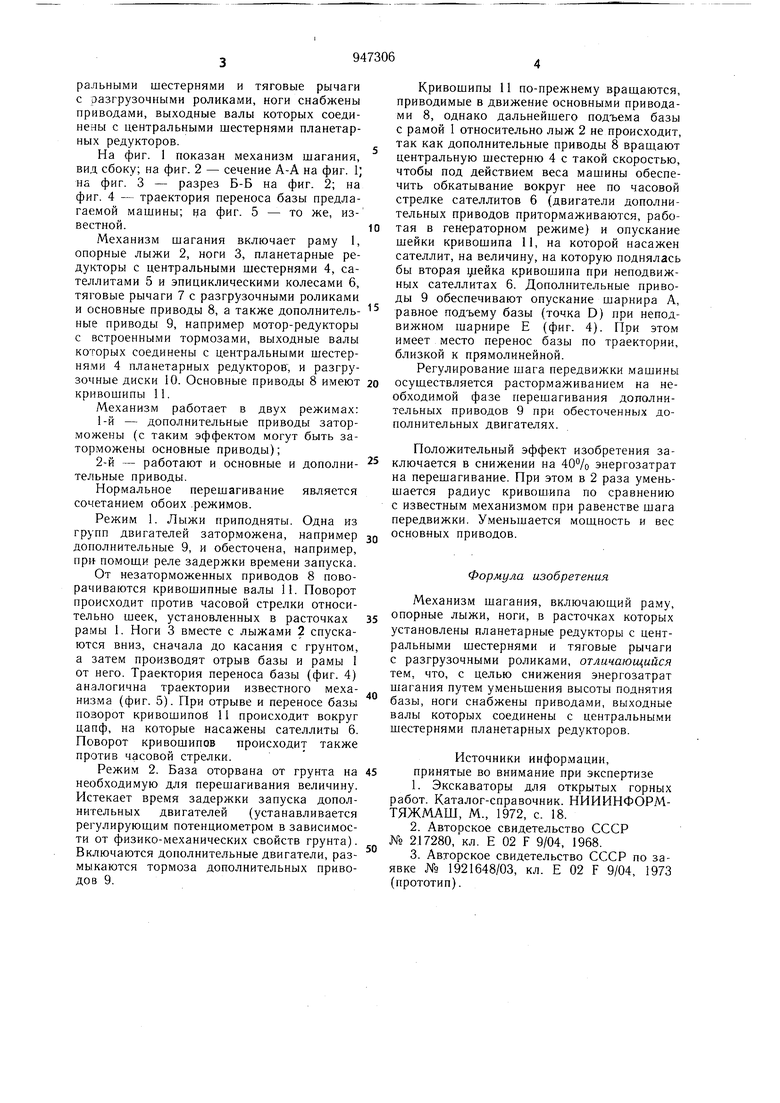
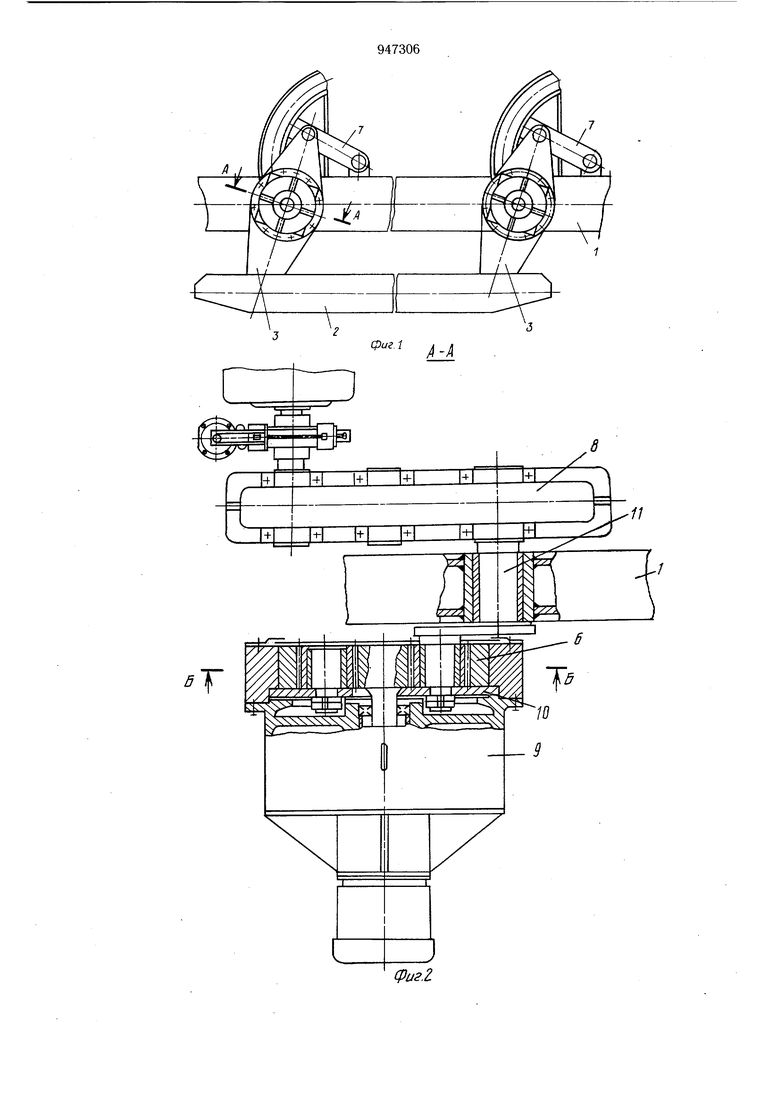
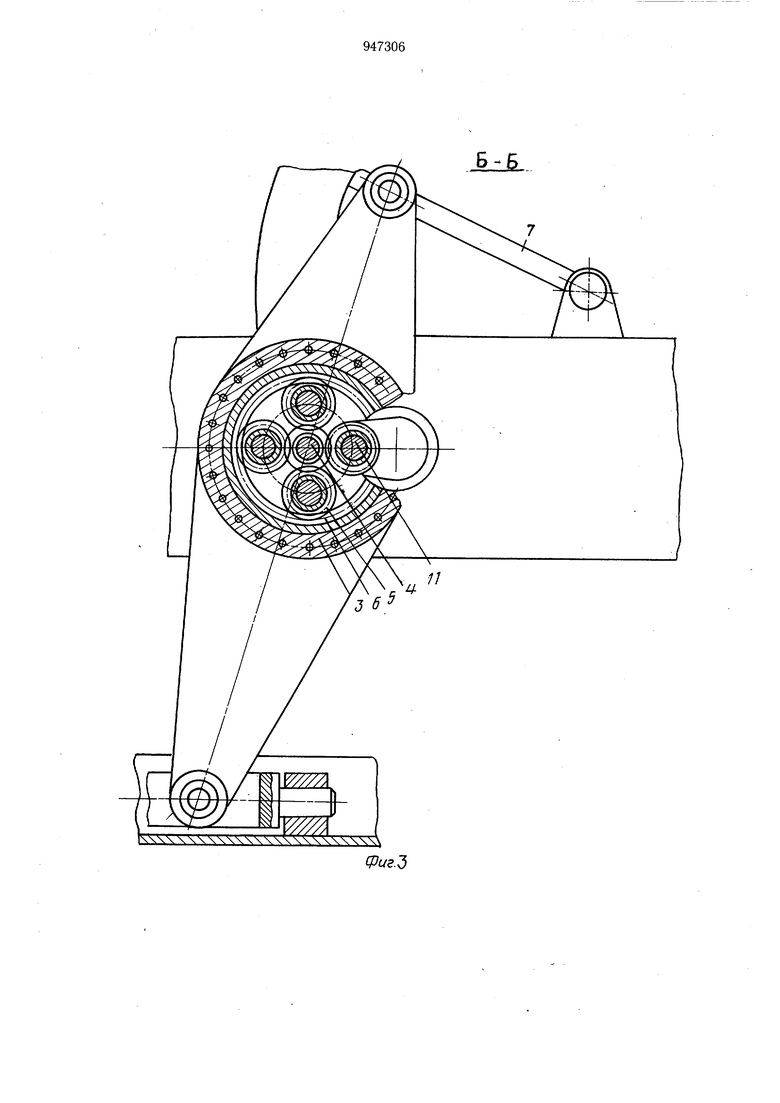
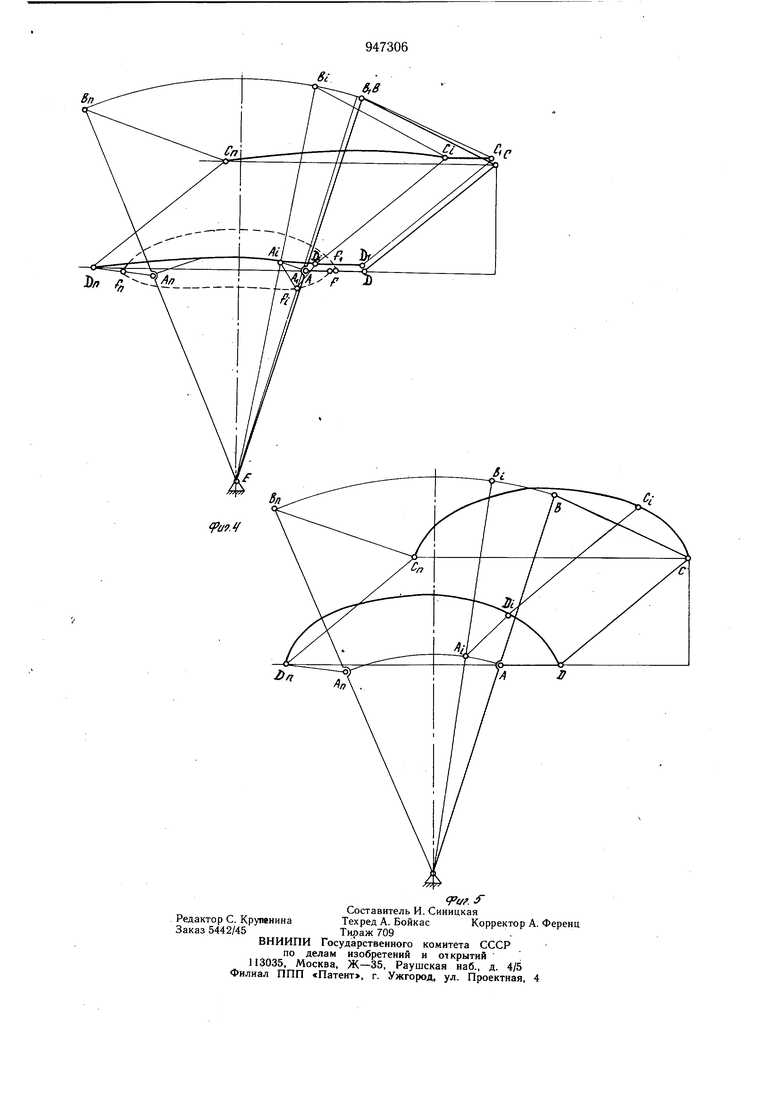
На фиг. I показан механизм шагания, вид сбоку; на фиг. 2 - сечение А-А на фиг. 1; на фиг. 3 - разрез Б-Б на фиг. 2; на фиг. 4 - траектория переноса базы предлагаемой машины; tja фиг. 5 - то же, известной.
Механизм шагания включает раму 1, опорные лыжи 2, ноги 3, планетарные редукторы с центральными шестернями 4, сателлитами 5 и эпициклическими колесами 6, тяговые рычаги 7 с разгрузочными роликами и основные приводы 8, а также дополнительные приводы 9, например мотор-редукторы с встроенными тормозами, выходные валы которых соединены с центральными шестернями 4 планетарных редукторов; и разгрузочные диски 10. Основные приводы 8 имеют кривошипы 11.
Механизм работает в двух режимах: 1-й - дополнительные приводы заторможены (с таким эффектом могут быть заторможены основные приводы);
2-й - работают и основные и дополнительные приводы.
Нормальное перешагивание является сочетанием обоих .режимов.
Режим 1. Лыжи приподняты. Одна из групп двигателей заторможена, например дополнительные 9, и обесточена, например, при помощи реле задержки времени запуска. От незаторможенных приводов 8 поворачиваются кривошипные валы 11. Поворот происходит против часовой стрелки относительно шеек, установленных в расточках рамы 1. Ноги 3 вместе с лыжами 2 спускаются вниз, сначала до касания с грунтом, а затем производят отрыв базы и рамы 1 от него. Траектория переноса базы (фиг. 4) аналогична траектории известного механизма (фиг. 5). При отрыве и переносе базы поворот кривошипой 11 происходит вокруг цапф, на которые насажены сателлиты 6. Поворот кривошипов происходит также против часовой стрелки.
Режим 2. База оторвана от грунта на необходимую для перешагивания величину. Истекает время задержки запуска дополнительных двигателей (устанавливается регулирующим потенциометром в зависимости от физико-механических свойств грунта). Включаются дополнительные двигатели, размыкаются тормоза дополнительных приводов 9.
Кривошипы 11 по-прежнему вращаются, приводимые в движение основными приводами 8, однако дальнейшего подъема базы с рамой 1 относительно лыж 2 не происходит, так как дополнительные приводы 8 вращают центральную шестерню 4 с такой скоростью, чтобы под действием веса машины обеспечить обкатывание вокруг нее по часовой стрелке сателлитов 6 (двигатели дополнительных приводов притормаживаются, работая в генераторном режиме) и опускание шейки кривошипа 11, на которой насажен сателлит, на величину, на которую поднялась бы вторая цдейка кривошипа при неподвижных сателлитах 6. Дополнительные приводы 9 обеспечивают опускание шарнира А, равное подъему базы (точка D) при неподвижном шарнире Е (фиг. 4). При этом имеет место перенос базы по траектории, близкой к прямолинейной.
Регулирование шага передвижки машины осуществляется растормаживанием на необходимой фазе перещагивания дополнительных приводов 9 при обесточенных дополнительных двигателях.
Положительный эффект изобретения заключается в снижении на 40% энергозатрат на перешагивание. При этом в 2 раза уменьшается радиус кривошипа по сравнению с известным механизмом при равенстве шага передвижки. Уменьшается мощность и вес основных приводов.
Формула изобретения
Механизм шагания, включающий раму, опорные лыжи, ноги, в расточках которых установлены планетарные редукторы с центральными шестернями и тяговые рычаги с разгрузочными роликами, отличающийся тем, что, с целью снижения энергозатрат шагания путем уменьшения высоты поднятия базы, ноги снабжены приводами, выходные валы которых соединены с центральными шестернями планетарных редукторов.
Источники информации, принятые во внимание при экспертизе
