Изобретение относится к автоматачеокому управпению и может найти применение в системах числового программного управпения станками и автоматами.
Известны однокоординагные следящие гидравлические системы, содержащие шаговый электродвигатель и гидроусилитель момента с четырехкромочным золотником Til.
Наиболее близким по технической сущности к изобрютению является однокоординатная следящая гидравлическая система, содержащая связанный с резцедержателем силовой дифференциальный привод с двумя аксиальными гидромоторам и дроссельный управляющий блок Гз.
Существенным недостатком известной однокоординатной гидравлической следящей системы является сравнительно малая скорость холостого хода, так как каретка суппорта приводится в движение от разности скоростей гидромоторов.
Для расщирёния диапазона скоростей путем повыщения скорости холостого ходаг дроссельный управляющий блок состоит из двух четырехкромочных золотников, размещенных друг относительно друга с постоянным фазовым смещением, подклк ченных к аксиальным гндромоторам и кинематически связанных с резцедержателем.
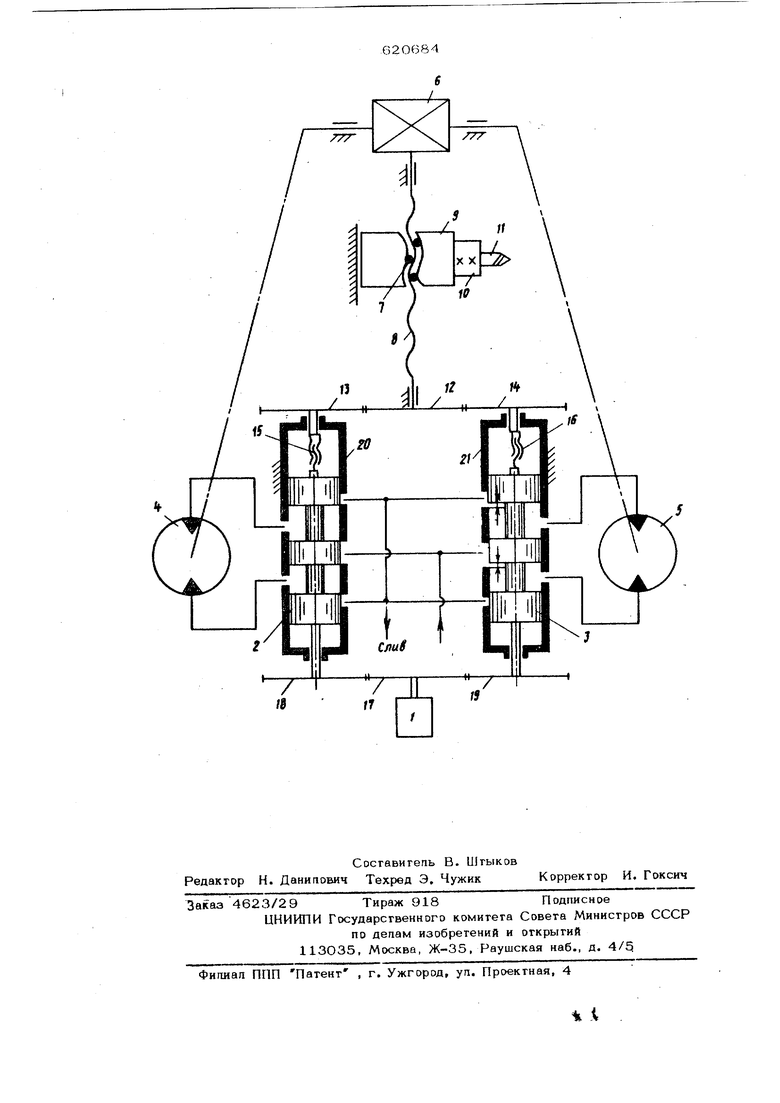
Однокоординатная следящая гидравлическая система изображена .на чертеже.
Она содержит шаговый электродвигатель 1, четырехкромочные золотники 2 и 3, аксиальные гидромоторы 4 и 5, валы которых подключены к механическому силовому дифференциалу 6, который через гайку 7 вращает ходовой винт 8. Ходовая гайка 7 жестко соединена с подвижной кареткой 9 суппорта, несущей резцедержатель 1О с резцом 11. Ходовой винт 8 через редуктор с щестернями 12-14 кинематически связансо сравнивающими устройствами 15 и 16 золотников, с которыми кинематически через редуктор с щестернями 17-J9 связан вал щагового электродвигателя 1. Золотники 2 и 3 образуют с кромками окон втулок 2О и 21 рабочие щели, регулирующие расходы жидкости через гидромогоры 4 и 5. Схема включения гидромогоров - реверсивная, Особенносгью ки немагической связи дроссельных зопогников друг с другом яваяегся наличие фазового смещения, г.е, один зопогник (например, зрпогник 2) находится в сред нем положении н вал гидромотора 4 неподвижен, другой зологник 3 в этот момент имеетоткрытые рабочие щепи (зазоры а) и вал гидромотора 5 вращается со скоростью, близкой или равной номинальной. Двигатель 1, шестерни 1719, зопотники 2 и 3 составляют дроссел ный управляющий блок. Система работает следующим образом При отсутствии входных управляющих импульсов от шагового электродвигателя 1 золотники 2 и 3 занимают положения, при которых через гидромоторы 4 и 5 протекают одинаковые расходы жидкости поэтому валы гидромоторов вращаются с одинаковой скоростью. Направление вращения валов выбирают таким , чтобы скорости в дифференциале 6 вычитались, тогда ходовой винт 8 неподвижен. В это момент оба золотника имеют одинаковую начальную ширину рабочих щелей. При подаче управляющих импульсов шаговый электродвигатель 1 через шестерни 1119 с помощью устройств 15 и 16 cpaBH кия смещает золотники из положения нейтрапи. Ширина рабочих щелей одного из них становится больше (меньше), а другого - меньше (большф Пря этом скорость вапа одного гидромотора возрастает (убывает), а другого - убывает (возрастает). В результате ходовой винт 8 получает вращение, чем достигается рабочая подача каретки 9 суппорта. При дальнейшем.увегшчении частоты подачи управляющих импульсов растет рассоглассдаание золотников с их втулками. Это приводи г к дальнейшему росту скорости вращения одного из гидромоторов и к остановке (с поспедующим реверсом скорости) другого. Как только направления скорости вращения гидромотора при большом рассогласовании системы изменяю ся, начинается сумми-рование скоростей вращения гидромоторов. Этим достигается увеличение скорости холостого хода каретки суппорта. Условия работы следящей системы в обе стороны движения одинаковы. Использование предлагаемой схемы гидравлической следящей системы позволяет увеличить скорость холостого хода каретки суппорта, что особенно важно в конструкциях следящего привода с большим ходом каретки суппорта. Формула изобретения Однокоординатная следящая гидравлическая система, содержащая связанный с резцедержателем силовой дифференциальный привод с двумя аксиальными гидромоторами и дроссельный управляк щий блок, отличающаяся тем, что, с целью расширения диапазона скоростей системы путем повышения скоросш холостого хода, дроссельный управдяю щий блок состоит из двух че ты рехк ром очных золотников, размещенных друг относительно друга с постоянным смещением, подключенных к аксиальным гидромсторам и кинематически связанных с резц держателем. Источники информации, принятые во .внимание при экспертизе: 1.Лещенко В. А. Гидравлические следящие приводы станков с программным управлением. М., Машиностроение, 1975, с. 71. 2.Авторское свидетельство СССР MO 441417, кл. Р 15 В 9/13.
| название | год | авторы | номер документа |
|---|---|---|---|
| Однокоординатная следящая гидравлическая система | 1972 |
|
SU441417A1 |
| Однокоординатная следящая сис-TEMA | 1979 |
|
SU844834A1 |
| Устройство для бескопирной обработки профильных валов с равноосным контуром | 1978 |
|
SU743793A1 |
| Устройство для управления положением рабочих органов | 1977 |
|
SU677911A1 |
| Устройство для кинематического дробления стружки | 1977 |
|
SU683856A1 |
| Гидрокопировальный многопроходный суппорт | 1981 |
|
SU1134350A1 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ СЛЕДЯЩИЙ ПРИВОД | 2002 |
|
RU2218486C1 |
| Гидравлическое копировальное устройство | 1980 |
|
SU897473A1 |
| Полуавтоматический электрокопировальный фрезерный станок для обработки фасонных контуров больших размеров, в частности самолетных шаблонов | 1948 |
|
SU86730A1 |
| Устройство для управления подачейНОжЕВОгО СуппОРТА лущильНОгО CTAHKA | 1979 |
|
SU816745A1 |