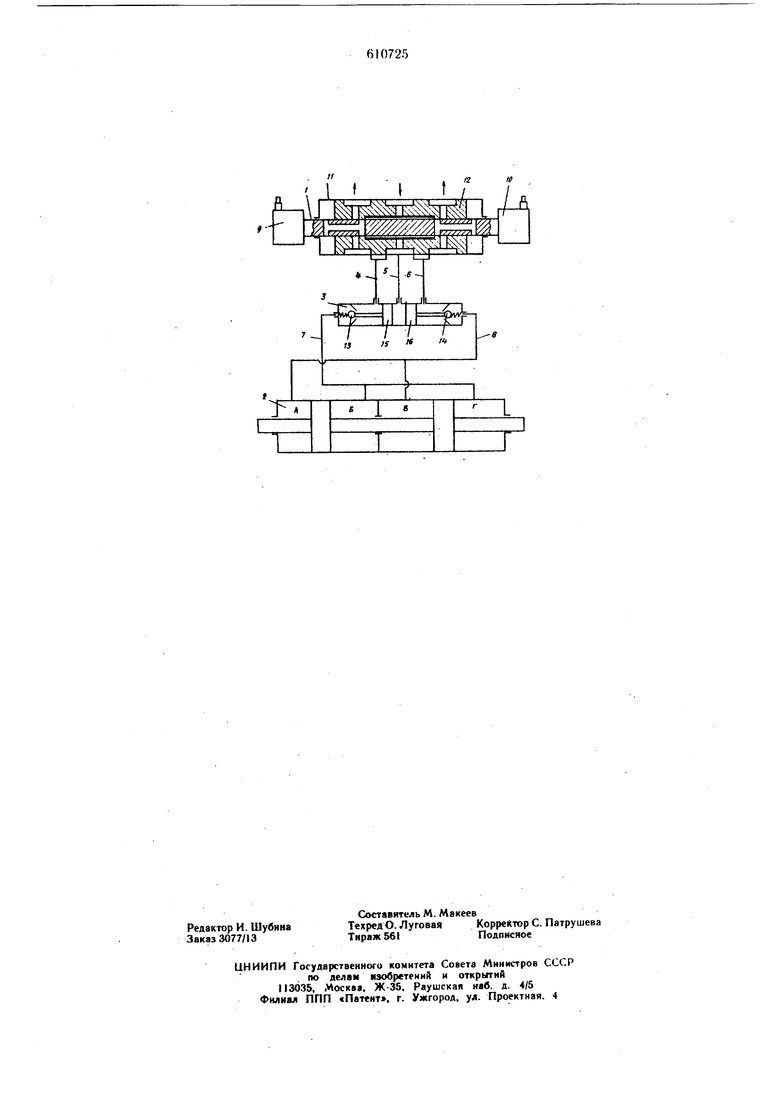
Гилрозамок 3 содержит подпружиненные клапаны 13 и 14 и взаимодействующие с ними поршни 15 и 16. Электрогидравлическин следящий привод работает следующим образом. При отсутствии электрического сигнала управлениг распределительный золотник 2 гидроусилителя И находится в среднем (нейтральном) положении, перекрывая поясками доступ рабочей жидкости в полости исполнительного механизма 2. Рабочая жидкость, поступающая из напорной магистрали гидросистемы питания привода через центральную проточку распределитель чого золотника 12 и канал 5 в полость между порщнями 15 и 16 гидрозамкз, смещает поршни в противоположных направлениях и открывает клапаны 13 и 14, сообщая каналы 4 и 7, а также 6 и 8 с полостями исполнительного механизма 2. При подаче сигнала управления в электрогидравлический преобразователь I происходит смещение распределительного золотника 12 в ту или другую сторону от нейтрального положения в зависимостиот направления сигнала управления и смещения управляющего золотника гидроусилителя. При смещении распределительного золотник 12,например/ влево, рабочая жидкость под дзв;(ением поступает по каналу 4 через клапан 13,канал 7 в полости Б и Г исполнительного механизма 2. Поршня со штоком исполнительного мехакизма перемещаются влево, поворачивая управляемый орган в соответствующем направлении. Одновременно с этим полости А и В исполнительного механизма через канал 8, клапан И и канал 6 сообщаются со сливом. Так как давление рабочей жидкости в канале 5 превыщает давление рабочей жидкости, поступающей по каналам 4 и б в полости исполнительного механизма 2, на величину потерь давления в дросселирующих щелях распределительного золотника 12, то клапаны 13 и 14 гидрозамка при включенной гидросистеме питания привода всегда открыты. При изменении направления сигнала управления, подаваемого в электрогидравлический преобразователь 1, и смещении управляющего золотника гидроусилителя вправо распределительный золотник 12 также перемещается вправо. При .этом рабочая жидкость под давлением поступает по каналу 6 через клапан 14 и канал 8 в полости А и В исполнительного механизма. Из полостей Б н Г исполнительного механизма рабочая жидкость по каналу 7 через клапан 13 и какал 4 проходит на слив. ПорШни со щтоком исполнительного механизме перемещаются вправо, поворачивая управляемый орган н противоположном направлении. При необходимости зафиксировать шток исполнительного механизма 2 в заданном положении система автоматического управления выводит шток привода и, следовательно, орган управления в положение фиксации. Выключаются гидросистема питания привода (напорная магистраль гидросистемы соединяется с магистралью слива, например, с помощью электромагнитного клапана, который на чертеже не показан) и система автоматического управления. В результате снижается давление в полости между поршнями 15 и 16 гидрозамка 3, и клапаны 13 и 14 под действием пружин разъединяют каналы 4 и 7, а также 6 и 8, отсекая тем самым полости А и В, а также Б и Г исполнительного механизма 2 от электрогидравлического преобразователя 1. Запирание полостей исполнительного механизма может-быть произведено при крайних и любых промежуточных положениях штока, как на холостом ходу, так и под нагрузкой. Для расфиксации штока исполнительиого механизма включается гидросистема питания привода и поршни 15 и 16 гидрозамка 3 открывают клапаны 13 и 14, сообщая каналы 4 и 7. а также 6 и 8 с полостями исполнительного механизма 2. Формула изобретения Электрогидравлический следящий привод системы автоматического управления органами стабилизации движения судна, содержащий исполнительный механизм со щтоком, гидравлически связанный с золотниковым гидроусилителем посредством гидрозамка, включающего поршень и подпружиненные клапаны, причем золотниковый гидроусилитель связан с напорной магистралью гидросистемы питания, отличающийся тем, что, с целью повышения надежности работы привода за счет обеспечений автоматической фиксации штока исполнительного механизма в заданном положении, гидрозамок выполнен с двумя порщнями, каждый из которых взаимодействует с подпружиненным клапаном, причем полость между поршнями гидрозамка соединена через золотниковый гидроусилитель с напорной магистралью гидросистемы питания. Источники информации, принятые во внимание при экспертизе: 1. Авторское свидетельство СССР № 311817, кл. В 63 Н 25/12, 1969.
1 I 1 Г
А
Ж

| название | год | авторы | номер документа |
|---|---|---|---|
| РЕЗЕРВИРОВАННЫЙ СЛЕДЯЩИЙ ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ ПРИВОД | 2002 |
|
RU2237826C2 |
| РЕЗЕРВИРОВАННЫЙ СЛЕДЯЩИЙ ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ ПРИВОД | 2003 |
|
RU2241143C1 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКАЯ РУЛЕВАЯ МАШИНА СИСТЕМЫ УПРАВЛЕНИЯ НОСКОМ КРЫЛА ЛЕТАТЕЛЬНОГО АППАРАТА | 1978 |
|
SU1840177A1 |
| ИСПОЛНИТЕЛЬНЫЙ МЕХАНИЗМЭЛЕКТРОГИДРАВЛИЧЕСКОГО СЛЕДЯЩЕГО ПРИВОДААВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ОБЪЕКТАМИ | 1972 |
|
SU427885A1 |
| СИСТЕМА РЕГУЛИРОВАНИЯ ГАЗОТУРБИННОГО ДВИГАТЕЛЯ | 1989 |
|
RU1732737C |
| ГИДРОСИСТЕМА КРАНО-МАНИПУЛЯТОРНОЙ УСТАНОВКИ | 2003 |
|
RU2252909C2 |
| РЕЗЕРВИРОВАННЫЙ СЛЕДЯЩИЙ ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ ПРИВОД | 2002 |
|
RU2230944C2 |
| Электрогидравлическое устройство управления исполнительным механизмом | 1981 |
|
SU1002697A1 |
| Гидравлический привод судовой рулевой машины | 1983 |
|
SU1109337A1 |
| Гидравлический сервопривод | 1988 |
|
SU1546328A1 |
а f
