Изобретение относится к электроизмерительной технике и может быть использовано для раздельного измерения параметров комплексных величин, например, при измерении параметров элек трических цепей, а также неэлектричес ких величин с помощью индуктивных и емкостных преобразователей. Известны устройства, в которых измеряемый сигнал циклически компенсируется пилообразным напряжением, длительность которого соизмерима с полуперйодом несущего колебания, причем измерение амплитуды синусоидальной составляющей заканчивается в тот . момент, когда мгновенное значение квадратурной составляющей равно нулю Такой автоматический компенсатор содержит генератор несущего колебания, первичный измерительный преобразователь, генератор компенсирующего напряжения, формирователь импульсов, Э4 ектронные ключи, дискретный делитель напряжения, нуль-орган, генератор образцовой частоты, реверсивный счетчик импульсов, делитель частоты, устройство управления дискретным делителем напряжения,цифровой индикатор D-I. В этом устройстве один из выходов генератора несущего колебания соединен через формирователь импульсов с входами электронных ключей, другой его выход через первичный измерительный преобразователь и нуль-орган также соединен с первым электронным ключом. Генератор импульсов образцовой частоты через первый ключ соединен с одним из входов реверсивного счетчика, а чере-з второй и делитель частоты на два - с другим входом счетчика, выход которого через схему управления соединен с цифровым индикатором и дискретным делителем напряжения. Вход последнего соединен с индикатором -компенсирующего напряжения, а выход - со входом нуль-органа. Недостатком этого устройства является сравнительно невысокая точность измерения,, обусловленная трудностью формирования компенсиругадего напряжения с заданной максимальной амплитудой, а также довольно большое число шагов (приближений), которое требуется на формирование точного цифрового эквивалента амплитуды синфазной составлягацеи. Наиболее близок к предлагаемому устройство для раздельного измерения параметров комплексных величин, обладающее увеличенным быстродействием и повышенной точностью измерения по сравнению с первым известным устройством. Оно снабжено кольцевым счетчиком импульсов, вход которого соединен с выходом электронного ключа, а один из выходов кольцевого счетчика импульсов соединен с входом цифрового индикатора; .при этом второй его выход через генератор компенсирующего напряжения подсоединен к входу нульоргана Г2.. . Недостатком лрототипа является относительно низкое быстродействие изза отсутствия адаптации к амплитуде измеряемого сигнала и сдвигу его фазы относительно полезного сигнала. Цель изобретения - повышение быстродействия процесса раздельного измерения параметров комплексных величин Поставленная цель достигается тем что в устройство для раздельного измерения параметров комплексных величин, содержащее генератор несущего колебания, один выхбд которого через первичный измерительный преобразователь соединен с первым входом (ульоргана, второй вход которого соединен с выходом генератора компенсируквдего сигнала, вход которого подключен к выходу счетчика, другой, выход генератора несущего колебания соединен с формирователем импульсов, генератор импульсов образцовой частоты, выход которого соединен с входом электронного ключа, и цифровой индикатор, вв дены второй нуль-орган, аналоговый и импульсный элементы временной задерж ки, блок фиксации фазового сдвига, преобразователь временного интервала в код и управляемой делитель частоты При этом первый вход второго нульоргана соединен с выходом первичного измерительного преобразователя, второй его вход через аналоговый элемен задержки - с выходом генератора компенсирующего сигнала, йлход этого нуль-органа соединен с первым входом преобразователя временного интервала в код, выход первого нуль-органа соединен соответственно со вторыми вхо дами блока фиксации фазового сдвига преобразователя временного интервала в код, к третьим входам которых подключен выход реверсивного счетчика. Первый выход блока фиксации фазового сдвига соединен со вторым входом эле тронного ключа, выход которого чере импульсный элемент временной задержк и управляемый делительчастоты, управлянйдий вход которого соединен с выходом преобразователя временного интервала в код, подключен к счетному входу реверсивного счетчика. Вычислен{1е параметров квазиоптимального режима работы в описанном устройстве осуществляется блоком оптимизации по быстродействию, включающим в себя управляемый делитель частоты и импульсный элемент задержки, путем определения значения весового коэффициента приращения времени запуска компенсирующих сигналов для последующей итерации. Этот квазиоптимальный весовой коэффициент учитывает первую производную входного сигнала в районе компенсации в данной итерации. Изменение амплитуды соответствуккцей составля1одей сигнала на выходе первичного измерительного преобразователя осуществляется путем запуска преобразователя напряжения в код последовательного счета, включающего в себя нуль-орган, генератор компенсирующего сигнала, блок фиксации фазового сдвига и формирования первой разности момента компенсации измеряемого сигнала первым компенсирующим сигналом и точкой экстремума, соответствующей составляющей, измеряемого сигнала, и цифровой индикатор. Запуск преобразователя напряжения в код осуществляется в моменты времени, определенныеблоком оптимизации по быстродействию. Сигнал, вырабатываемый генератором компенсирующего сигнала, может быть линейно-возрастающим или линейно падающим. Информация для работы указанных блоков получается в результате функционирования блока определения производной. Этот блок включает в себя второй нульорган, аналоговый элемент временной задержки и преобразователь временного интервала второй разности моментов компенсации измеряемого сигнала первым и вторым компенсирующими сигналами .в код. Второй компенсирующий сигнал образуется путем временной задержки сигнала с выхода генератора компенсирующего сигнала на определенное время аналоговой линией временной задержки. На фиг. 1 показана структурная схема устройства «для разд€зльного измерения параметров комплексных величин; на фиг. 2 - временные диаграм1 ы, поясняющие принцип его работы. . Устройство содержит генератор 1 несущего колебания, первичный измерительный преобразователь 2, формирователь импульсов 3, преобразователь 4 напряжения в- код последовательного счета (ПНК), блок 5 определения производной, блок 6 оптимизации по быстродействию, реверсивный счетчик 7. ПНК содержит нуль-орган 8, генератор 9 компенсирующего напряжения, блок 10 фиксации фазового сдвига, схему формирования первой разности момента компенсации измеряемого сигнала первым компенсирующим сигналом и точкой экстремума, цифровой индикатор 11. Блок 5 содержит нуль-орган 12, аналоговый элемент временной за-держки 13, преобразователь 14 воеменйого интервала второй разности моментов компенсации измеряемого сигнала первым и вторым компенсирующими напряжениями в код. Блок 6 содержит электронный ключ 15, генератор 16, импульсов образцовой частоты импульсный элемент временной задержки 17 и управляемый делитель частоты 18.
На эпюрах показаны изменения сиглов устройства во времени где:
А - сигнал несущего (опорного) колебания, одновременно показывает синфазную fполезную) составляющую сигнала Б;
Б - измеряемый, выходной сигнал первичного измерительного преобразов ателя;
В - сигнал., соответствующий момен ту времени экстремума синфазной составлякщей сигнала .В;
Г - совокупность импульсов, соответствующая четверти периода несущего колебания;
Д. - импульсы запуска генератора компенсирующего сигнала ПНК в i-той интерации)
- первый компенсирующий сигнал в i-той итерацииf
Ж- - второй компенсирующий сигнал в i-той итерации;
- сигнал, соответствукщий момен. ту равенства измеряемого Б и первого компенсирующего Е- сигналов в i-той итерации;
И, - сигнал, соответствующий моменту компенсации измеряемого Б и второго компенсирующего Ж сигналов в 1-той итерации; К - сигнал, длительность которо равна первой разности моментов врем ни в i.-той итерации; - сигнал, соответствующий зна первой разности в i-той итерации; М- - промодулированный частотой опорного генератора сигнал К-; Н - совокупность импульсов М, задержанная на импульсном элементе временной задержки; О - код, соответствующий второй разности моментов времени В 1-той итерации; 111 - совокупность импульсов, соо ветствующая квазиоптимальному изме.нению времени запуска в i-той итера ции; Р - состояние реверсивного счетчика к концу i-той итерации. Способ измерения рассмотрен применительно к измерению амплитудного значения синфазной составляющей. В определенные мСменты времени за пускают два компенсирующих линейноизменямцихся сигнала, причем в момент Т запускают первый, а в-Т второй компенсирующие сигналы (коэффициенты пропорциональности Kjj компенсирующих сигналов во времени равны между собой и постоянны на протяжении всего времени работы устройства. iasHocTb моментов запуска компенсирукмдих сигналов /j Т Т- - Ту также постоянна). Затем регистрируют моменты Т- , f компенсации .измеряемого., сигнала каждым из компенсирующих, Определяют первую разность моментов времени между моментом компенсации измеряемого сигнала первым развертывающим и точкой экстремума синфазной составляющей Т, т. е. i i ${ Значение найденной величины сравнивают с наперед заданным значением €. , определяемым из условия измерения амплитудного значения синфазной, составляющей с погреностью не более допустимой. При наступлении момента компенсации в зоне допустимой погрешности, т. е.1Ч,|$€, измерение заканчивается.
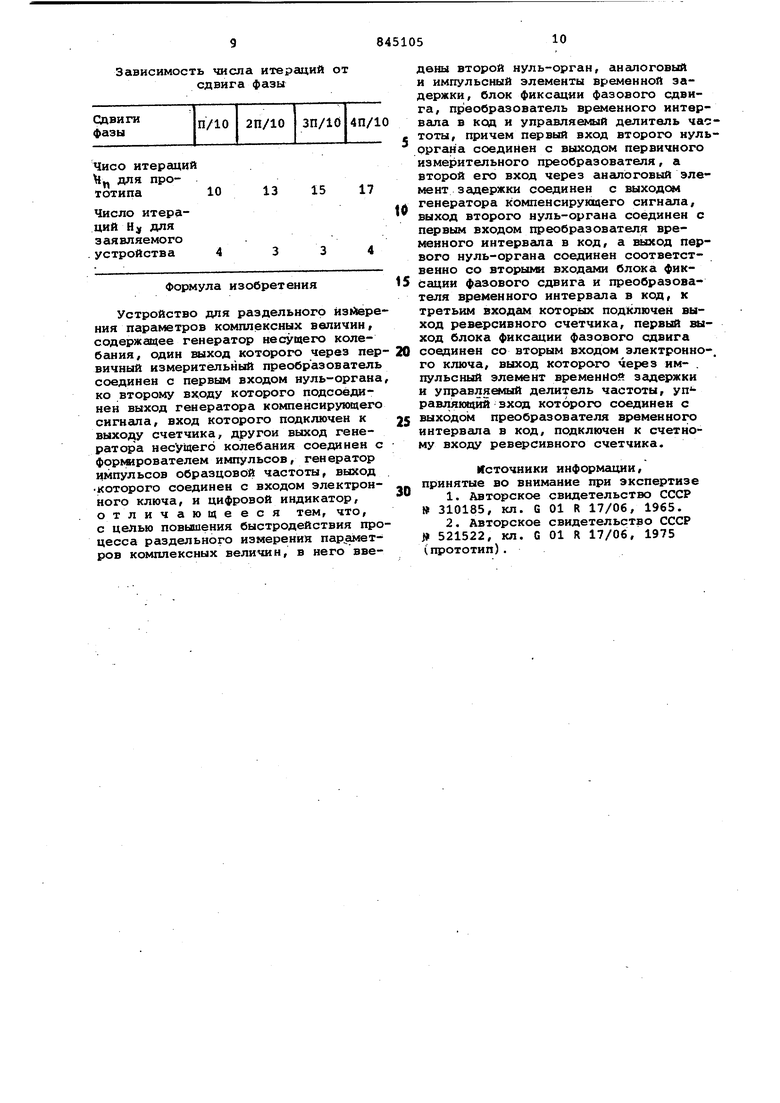
- При наступлении момента компенсации вне зоны допустимой погрешности, т. e-lfil fe , измерение амплитудног значения продолжают на основе информации, полученной в этой i-той итерации.. Для этого определяют вторую разность фаз л х - моментов Т.; и Т , компенсации измеряемого сигнала первым и вторым компенсирук цими сигналами,- т. е. Д X .; т| Т . Значения моментов запуска и компенсирующих сигналов для i + + 1-вой итерации определяют в соответствии с-выражениями (1) и (2), учитыггиоцими производную сигнала К в квазиоптимальном коэффициенте 3): Т. + ,- + В Т,-, -4, + Л Т; k- Kj. vK, + 1 : UT)A (3) Г Т с/2, при запуске в каждом полу пери оде , Т(-, при запуске в одном полупериоде . В моменты Т .4-1 и Т,;, производят новый запуск компенсирующих сигналов и получают информацию о моменте компенсации измеряемого сигнала линейног змерякядихся в этой U +1)-вой итерации, и т. д. Таким образом, адаптивное изменение коэффициента веса 4j 1, т. к. Л Т /1 х, в рекуррентном уравнении (1) позволяет наилучшим по быстродействию образом определить значение момента запуска.компенсирующих сигналов для последующих итераций и дает возможность приспосабливать итерационный, процесс измерения к амплитуде измеряемого сигнала и сдвигу его фазы относительно полезного сигнала за счет использования информации о производной измеряемого СИП1 ал а К в момент компенсации. Устройство работает следующим образом. Генератор 1 несущего колебания вырабатывает сигнал А, питающий первичный измерительный преобразователь 2, у которого выходной сигнал Б несет информацию об измеряемых величинах. Формирователь иктульсов 3 вьщает последовательность импульсов Г, число которых соответствует четверти периода Т несущего колеба ния. При этом первый импульс.последовательности появляется в моменты Т, Тд, Т. , Txj,, фкг.. 2) и т, д. нулевой фазы несущего колебания. По следний импульс последовательности появляет ся в 1 « менты Т, Т, Чфиг- 2) и т. д. экстремума сигнала А. В моменты Т, Т, Т/(;фиг. 2) формирователь 3 вьиает также импульсы В. Импульсы Г считаются реверсивным счетчиком, причем е лкость счетчи ка и частота с;лёдований ймцульсов выбирается из условия заполнения по следнего за интервал времени Т../4 (в исходном состоянии счетчик обнулен) . В моме нты времени Т, Тд, Т , J (фиг. 2) счетчик 7 переполняется, запуская генератор компенсирукяцего сигнала 9 преобразоват.еля напряжения в код 4. При этом начинается компенсация сигнала Б сигналом Е. Компенсирующий сигнал Ё. подается в блок 5 определения производной в котором преобразуются в сигнал Ж путем временной задержки на величин ЛТ аналогового элемента 13. Сигнал ЖI также компенсирует измеряемый сигнал Б. В моменты,. Тд , Т , равенства измеряемого напряжения Б компенсирующему Е {фиг. 2) вырабатывается сигнал 3., , а компенсирующе му ж V моменты Т, . a-f Разность моментов времени появле ния импульсов В :| и 3 . 4 ° -b-i ) фиксируется блоком 10, который определяет и знак Л этой разности, причем значение сигнала Л равно ед нице при 1 и нулю при э. -1, где 3 sign Т g) . Разность моментов времени появле ния импульсов 3 и И ( Тд преобразуется в код О прёобразователем 14 блока 5 отфеделення произв. одной. Первая разность К поступает на вход электронного ключа 15 блока б оптимизации по быстродействию, где модулируется сигнале с частотой f вырабатываемым генераторсях 16. С вы да электронного ключа ,15 последовательность импульсов М подается на импульсный элемент задержки 17, на выходе которого импульсы появляются в моменты Tj,, Т .j, T,, 2) через интервал времени, ргшный максимально возможной величине первой разности, порядка Тс,/8, и поступаиот на управляемой делитель частоты 18. Управляемый делитель частоты 18 преобразует последовательность имульсов Н идентичную ) в поледовательность импульсов П прд оздействием кода О с блока 5 опеделения производной, согласно выажениям 4) и (3): Импульсы n.j подсчитываются реверивным счетчиком 7, режим работы которого з ад ается сигналом Л- со знакового выхода блока 10. Следовательно, к концу i-тoй итерации состояние реверсивного счетчика определяется выражением: Р. Р . + а.-П. 11--1 На этом 1-тая итерация заканчивается. В следующей О + 1)вом полупериоде несущего колебания U + 1)-вой итерации на суммирукщий вход реверсивного счетчика 7. поступае последовательность импульсов Г - . Реверсивный счетчик 7 в некоторый момент Тр.,. 1 моменты Т,, Тд, Т, Т переполняются, образуя при этом импульс Д.,- . Он запускает генератор 9 компенсирующего сигнала В (I + 1)-вой итерации и устанавливает в нулевое состояние блок 10 формирования первой разности и преобразователь 14 второй разности. По окончании счета импульсов последовательности Г-., реверсивный счетчик остается в состоянии Р . Дальнейшая работа устройства происходит аналогично вышеописанному до тех пор, пока а1 шлитуда составляющей не будет измерена с достаточной точностью. При этом блок 10 преобразователя напряжения в код 4 формирует сигнал на вход цифрового индикатора 11, несущий информацию об амплитудном значении синфазной составляющей . Экспериментальные и теоретические исследования описанного устройства показывают, что число итераций Ну для него значительно меньше, чем для прототипа Н„. Зависимость числа итераций, затрачиваемых на измерение максимального амплитудного значения синфазной составляющей l Гцсигнала, с погрешностью 0,05% от сдвига фазы измеряемого сигнала относительно опорного, приведена в таблице. Таким образом, данные та блицы подтверждают достижениепоставленной цейи: предлагаемое устройство для раздельного измерения параметров комплексных величин выполняет измерение 2,5-5 раз быстрее прототипа. Зависимость числа итераций от сдвига фазы Чисо итераций для прототипаЧисло итераций Ну для заявляемого устройства Формула изобретения Устройство для раздельного йзйер ния параметров комплексных величин, содержащее генератор несущего колебания, один выход которого через пе вичный измерительный преобразовател соединен с первым входом нуль-орган ко второму входу которого подсоединен выход генератора компенсирующег сигнала, вход которого подключен к выходу счетчика, другой выход генератора несущего колебания соединен формирователем импульсов, генератор импульсов образцовой частоты, выход которого соединен с входом электрон ного ключа, и цифровой индикатор, отличающееся тем, что, с целью повышения быстродействия пр цесса раздельного измерения парамет ров комплексных величин, в него вве дены второй нуль-орган, аналоговый и импульсный элементы временной задержки, блок фиксации фазового сдвига, преобразователь временного интервала в код и управляемый делитель частоты, причем первый вход второго нульоргана соединен с выходом первичного измерительного преобразователя, а второй его вход через аналоговый элемент задержки соединен с выходом генератора компенсирующего сигнала, выход второго нуль-органа соединен с первым входом преобразователя временного интервала в код, а выход первого нуль-органа соединен соответственно со вторы в1 входами блока фиксации фазового сдвига и преобразователя временного интервала в код, к третьим входам которых подключен выход реверсивного счетчика, первый выход блока фиксации фазового сдвига соединен со вторым входом электронно-, го ключа, выход которого через импульсный элемент временной задержки и управляемый делитель частоты, управляющйй вход которого соединен с выходом преобразователя временнохю интервала в код, подключен к счетному входу реверсивного счетчика. Источники информёщии, принятые во внимание при экспертизе 1.Авторское свидетельство СССР 310185, кл. G 01 R 17/06, 1965. 2.Авторское свидетельство СССР J 521522, кл. G 01 R 17/06, 1975 (прототип),
Tf ТгТ Т„ Tf4 . 7,e Т„ Т,д Т 7
-/
Фаг. 2



| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ЗАЩИТЫ ОТ ПОМЕХ | 1990 |
|
RU2074516C1 |
| Устройство для кодирования сигналов частотных датчиков | 1985 |
|
SU1336246A1 |
| СПОСОБ ИЗМЕРЕНИЯ ЭЛЕКТРИЧЕСКОЙ ЕМКОСТИ МЕЖДУ ДВУМЯ ПРОВОДЯЩИМИ ТЕЛАМИ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 1995 |
|
RU2110074C1 |
| Способ аналого-цифрового преобразования и устройство для его осуществления | 1987 |
|
SU1548845A2 |
| Аналого-цифровой преобразователь параметров диэлькометрического датчика | 1988 |
|
SU1547063A1 |
| АВТОМАТИЧЕСКИЙ КОМПЕНСАТОР ПЕРЕМЕННОГО ТОКА | 1971 |
|
SU310185A1 |
| Преобразователь частота-код | 1981 |
|
SU970681A1 |
| Устройство для измерения действующего значения переменного напряжения | 1986 |
|
SU1401388A1 |
| Цифровой демодулятор сигналов фазоразностной модуляции второго порядка | 1989 |
|
SU1716616A1 |
| Устройство для решения инверсных задач нестационарной теплопроводности | 1983 |
|
SU1179388A1 |


