реален чувствительный элемент с выходными контактами так, что .его продольная ось параллельна оси подвески и расположена в горизонтальной плоскости, причем выходные контакты Чувствительного элемента соединены с равноплечньгм резисторным мостом и с электронным переключателем блока индикации.
На фиг, 1 изображена функциональная схема устройства, на фиг. 2 конструктивная схема датчика, на фиг. 3 - принципиальная схема устройства.
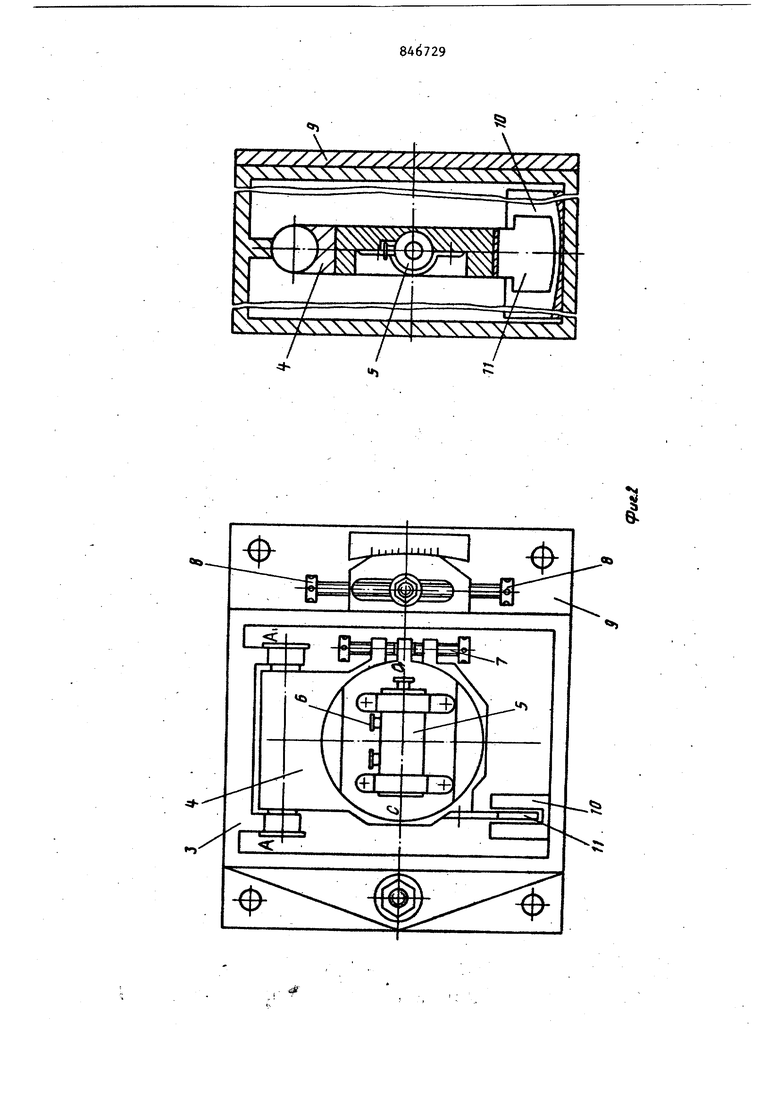
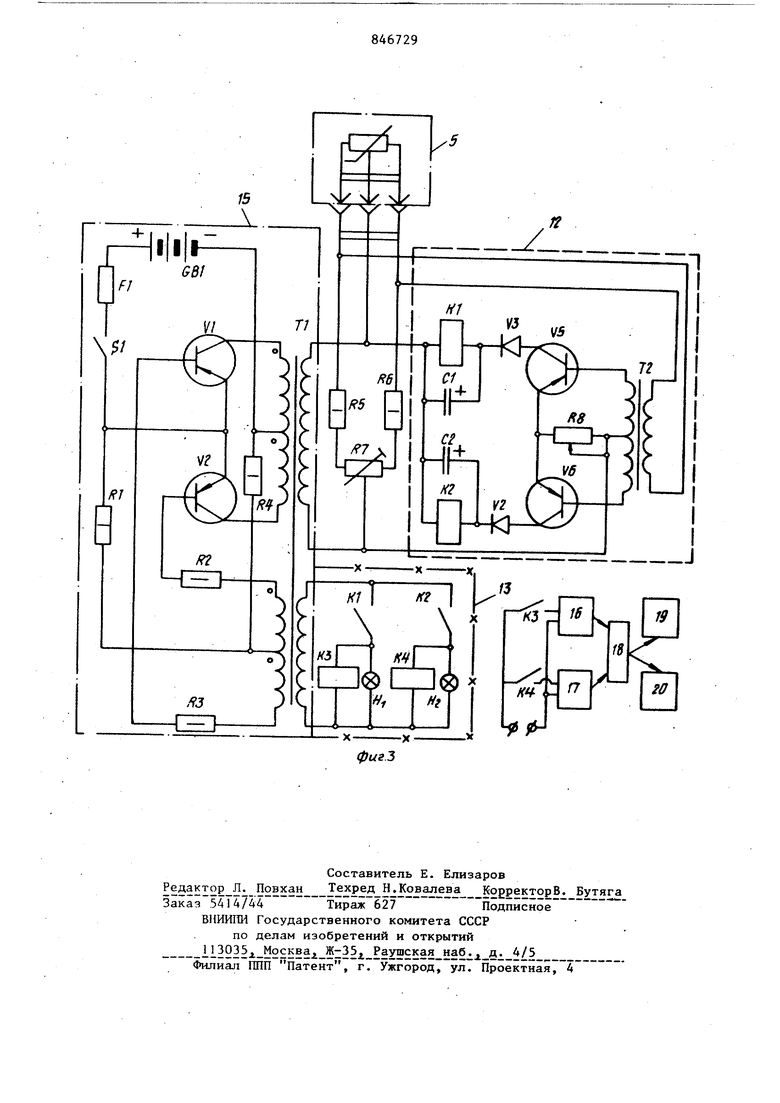
Схема устройства состоит из дат-. чика 1, закрепленного на секции 2 .опорного комплекта механизированной крепи. В корпусе 3 датчика (фиг. 2), на маятниковом подвесе 4 закреплен чувствительный элемент 5 с выходными контактами 6. .Чувствительный элемент 5 Закреплен так, что его продольная ось О-ОУ параллельна оси подвеса , что осуществляется с помощью регулировочных винтов 7, и расположена D направлении продольной оси секции 2. Для обеспечения горизонтального положения чувствительного элемента -предназначены регулировочные винты 8, поворачивающие корпус датчика 3 относительно;платы 9, за которую он крепится к секции 2 крепи. Для гашения затухающих колебаний маятникового подвеса служат постоянные магниты 10 и пластина 11. Электрический чувствительный элемент .выходными контактами 6 .электрически связан с электронным переключателем 12 (фиг, З) , а с резисторами -i .образует равноплечпый мост. При горизонтальном положении датчика-уров- ня на выходе электронного переключателя 12 напряжение отсутствует. Контакты реле К1 и К2 нормально разомк нуты и система 13 световой индикации отключена. Блок I4 индикации (фиг. 1) питается от преобразователя 15 напряжения, Система 13 световой индикации содержит реле R-j и R.
и лампы Н. и Н световой индикации.
Включение серводвигателя 16 ( или 17), переключающего распределительные золотники 18 гидросистемы домкрата 19 управления (или 20), осу(или
ществляется с помощью реле
R j) , контакт которого нормально разомкнут.
Устройство работает следующим образом.
В исходном положении секция 2 крепи своей продольной осью ориентирована в заданном направлении, например, по изогипсе пласта (изогипсной является линия или след от пересечения наклонной криволинейной плоскости, в данном случае почвы :
пласта, с горизонтальной плоскостью При этом датчик 1 выставлен горизонтально, а на входе электронного переключателя 12 (который включает реле К1 или К2 в зависимости от направленйя токав мосте сопротивления, т.е. от наклона чувствительного элемента в ту или другую сторону) ток отсутствует. При передвижке секций 2 в случае отклонения ее от изогипсы (например, секция несколько развернулась в сторону падения электролитический чувствительный элемент принимает негоризонтальное положение. Вследствие этого его внутреннее сопротивление меняется, мост резисторов R - R разбалансировывается. При этом на контактах 6 датчика и на входе электронного переключателя 12 возникает ток. Срабатывает реле К1 и в системе 13 световой индикации загорается индикатор-, ная лампа , сигналиэирующая об отклонении крепи от заданного направления. Одновременно с включением лампы Н,| включается реле КЗ, контакт которого замыйает электрическую цепь питания серводвигателя 16, который воздействует на распределительные золотники 18 гидросистемы. В результате домкрат 20 управления начинает разворачивать секцию в направлении восстания пласта до тех пор, пока сек1щя не возвращается в заданное направление i, а датчик 1 принимает исходное горизонтальное положение. При этом на контактах датчика и на входе электронного переключателя напряжение отсутствует,, т.е. вся система приходит в исходное положение. Поскольку чувствительный элемент 5 закреплен так, что его ось О -0 параллельна оси подвеса а в плоскости, нормальной к ней, датчик-уровень подвешен как
маятник, то контактирование воздушного пузырька и контактов 6 датчика всегда в вертикальной плоскости. Поэтому нулевой отсчет всегда стабилен и работоспособность устройства сохраняется при любых параметрах гипсометрии и углах падения пласта. В случае разворота секции в направлении восстания пласта электронный переключатель включает реле К2, в результате чего,включается вторая ветвь схемы: лампа Н, реле R, серводвигатель 17, распределительные золотники 18 и домкрат 19 управ л.ения, разворачивающий секцию в заданное направление« Таким образом, осуществляется автоматический контроль положения механизированной крепи относительно заданного направ ления. В случае необходимости изменения.ранее заданного направления движения крепи следует корпус датчика 1 развернуть относительно платы 9 с помощью регулировочных винтов 8. В результате чего нулевое положение датчика сохраняется при движении крепи в заданном направлении. Регулировка диапазона углов срабатывания устройства осуь ествляется путем изменения сопротивления моста переменным резистором R и резистором Rn электронного переключателя . Использование устройства повышает точность контроля положения механизированных крепей в очистных выработках крутых и наклонных пласт и дает возможность непрерывного функционирования независимо от величины подвигания очистного забоя, .параметров гипсометрии и углов . наклона пласта.. Формула изобретения Устройство для контроля положения механизированной крепи в очистных выработках, содержащее электролитический датчик уровня, блок индикации отклонения движения объекта относительно заданного направления, электронный переключатель блока индикации и исполнительные механизмы, отличающееся тем, что, с целью расширения функциональных возможностей, оно снабжено равноплечным резисторным мостом, а корпус электролитического датчика уровня снабжен маятниковой подвеской, на которой закреплен чувствительный элемент с выходными контактами так, что его продольная ось параллельна оси подвески и расположена в горизонтальной плоскости, причем выход ные контакты Чувствительного элемента соединены с равноплечным резистор1ЫМ мостом и с электронным переключателем блока индикации. Источники информации, принятые во внимание при экспертизе 1.Глушко В.В., Ульшин В.А. Новые средства автоматизации работы обычных и проходческих комбайнов. Известия ВУЗов, Горный журнал, 1963, 10. 2.Карташов Б.А. и др. Аппаратура аправленного вохдения проходческих омбайнов по заданному уклону.- Уголь 1974, № 8, с. 48-49 (прототип) .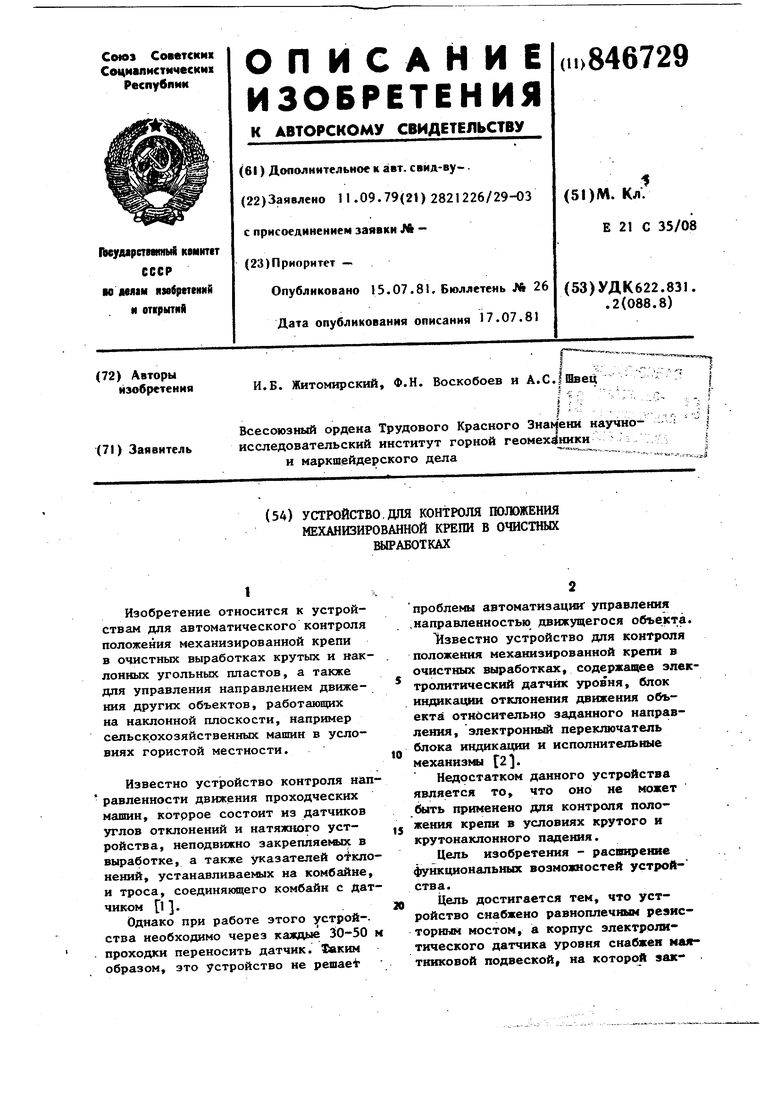
-)
VXX
iXXXXXX
/ /
