Изобретение относится к области измерительной техники и может быть использовано при разработке и изготовлении приборов для систем стабилизации, навигации и топопривязки объектов наземной техники.
Известен курсовой гироскопический прибор с самоориентированием на классическом гироскопе, построенный по схеме гироазимута, работающего в режиме гирокомпаса [1], принцип действия которого заключается в том, что при неподвижном основании прибор работает как гирокомпас, а при наличии ускорений (в движении) он переключается в режим гироазимута.
Недостатком курсового гироприбора с самоориентированием на классическом гироскопе является малая точность определения азимута в режиме гирокомпаса, связанная с невысокой точностью гироскопического чувствительного элемента.
Известен курсовой гироскопический прибор с самоориентированием [2], в котором в качестве чувствительного элемента применен динамически настраиваемый гироскоп, что обеспечивает повышенную точность самоориентирования.
Недостатком известного курсового гироскопического прибора с самоориентированием на динамически настраиваемом гироскопе является малая точность определения азимута при остановках объекта на наклонной поверхности, что связано с необходимостью выработки дополнительных компенсирующих и управляющих сигналов с помощью высоколинейных в широком диапазоне датчиков.
Известна система самоориентирующаяся гироскопическая курсокреноуказания [3], свободная от недостатков, указанных выше, и обеспечивающая работу в режиме самоориентирования (режиме гирокомпаса) во время стоянки объекта и режиме гироазимута во время стоянки и в движении при наклонах корпуса объекта.
Наиболее близкой по совокупности признаков к предлагаемому изобретению является система самоориентирующаяся гироскопическая курсокреноуказания [3], содержащая блок азимутальный, состоящий из внутренней рамы карданова подвеса с датчиком угла курса, датчиком стабилизирующего момента, усилителя стабилизации и гироскопического чувствительного элемента, имеющего две измерительные оси, образованные двумя ортогонально размещенными датчиками угла и датчиками момента, причем первая измерительная ось гироскопического чувствительного элемента совпадает с осью внутренней рамы карданова подвеса, а выход датчика угла, установленного на первой измерительной оси гироскопического чувствительного элемента, связан с входом усилителя стабилизации, выход которого связан с датчиком стабилизирующего момента, блок горизонтальный, состоящий из карданова подвеса с датчиками угла тангажа и крена, датчиками стабилизирующего момента, усилителей стабилизации, датчиков наклона, усилителей коррекции и гироскопического чувствительного элемента, управляющее устройство, состоящее из усилителя привода в меридиан, переключателя режимов с первым и вторым контактами, двух ограничителей и цифрового устройства, и преобразователь угол-код.
Недостаток известной системы самоориентирующейся гироскопической курсокреноуказания (в дальнейшем системы) заключается в повышенной погрешности определения азимута в режиме гирокомпаса в условиях внешних возмущений ее корпуса при работе на подвижном объекте, что объясняется воздействием на гироскопический чувствительный элемент блока азимутального (динамически настраиваемый гироскоп) в режиме самоориентирования дополнительных динамических ошибок со стороны блока горизонтального.
Колебания блока горизонтального вследствие его собственных ошибок стабилизации, вызванных колебаниями корпуса системы, приводят к воздействию дополнительной угловой скорости на блок азимутальный. При определенных параметрах входных воздействий указанная дополнительная угловая скорость может превышать измеряемую для осуществления поиска направления меридиана в режиме гирокомпаса блоком азимутальным угловую скорость горизонтальной составляющей угловой скорости вращения Земли в десятки и сотни раз, что практически приводит к нарушению нормального функционирования системы в режиме гирокомпаса.
Изобретение направлено на повышение точности определения исходного азимута системой самоориентирующейся гироскопической курсокреноуказания в условиях внешних возмущений ее корпуса при работе на подвижном объекте.
Это достигается тем, что в систему самоориентирующуюся гироскопическую курсокреноуказания, содержащую блок азимутальный, состоящий из внутренней рамы карданова подвеса с датчиком угла курса, датчиком стабилизирующего момента, усилителя стабилизации и гироскопического чувствительного элемента, имеющего две измерительные оси, образованные двумя ортогонально размещенными датчиками угла и датчиками момента, причем первая измерительная ось гироскопического чувствительного элемента совпадает с осью внутренней рамы карданова подвеса, а выход датчика угла, установленного на первой измерительной оси гироскопического чувствительного элемента, связан с входом усилителя стабилизации, выход которого связан с датчиком стабилизирующего момента, блок горизонтальный, состоящий из карданова подвеса с датчиками угла тангажа и крена, датчиками стабилизирующего момента, усилителей стабилизации, датчиков наклона, усилителей коррекции и гироскопического чувствительного элемента, управляющее устройство, состоящее из усилителя привода в меридиан, переключателя режимов с первым и вторым контактами, двух ограничителей и цифрового устройства, и преобразователь угол-код, введен компаратор, вход которого через усилитель привода в меридиан связан с выходом датчика угла, установленного на второй измерительной оси гироскопического чувствительного элемента блока азимутального, а выход - с входом цифрового устройства, первый выход которого связан с управляющим входом первого контакта переключателя режимов, а второй выход - с управляющим входом второго контакта переключателя режимов.
Сущность заявляемого устройства поясняется чертежом, на котором представлена схема системы самоориентирующейся гироскопической курсокреноуказания.
Предлагаемая система содержит блок азимутальный, состоящий из внутренней рамы 1 карданова подвеса с датчиком угла курса 2 и датчиком стабилизирующего момента 3, усилителя стабилизации 4 и гироскопического чувствительного элемента 5, имеющего две измерительные оси, образованные ортогонально расположенными датчиками угла 6, 7 и датчиками момента 8, 9, блок горизонтальный, включающий среднюю 10 и наружную 11 рамы карданова подвеса с датчиками углов тангажа 12 и крена 13, датчиками стабилизирующего момента 14, 15, усилители стабилизации 16, 17, датчики наклона 18, 19, усилители коррекции 20, 21 и гироскопический чувствительный элемент 22, управляющее устройство (на чертеже не показано), состоящее из усилителя привода в меридиан 23, переключателя режимов (на чертеже не показан) с контактами К1 и К2, двух ограничителей 24, 25, цифрового устройства 26, компаратор 27, преобразователь угол-код 28.
Гироскопический чувствительный элемент 5 установлен на внутренней раме 1 карданова подвеса так, что его первая измерительная ось, содержащая датчик угла 6 и датчик момента 9, совпадает с осью внутренней рамы 1, а вторая, содержащая датчик угла 7 и датчик момента 8, - ей перпендикулярна.
Блок азимутальный установлен в блоке горизонтальном так, что ось внутренней рамы 1 перпендикулярна осям средней 10 и наружной 11 рам карданового подвеса.
При работе системы блок горизонтальный осуществляет горизонтирование блока азимутального, удерживая ось поворота внутренней рамы 1 карданова подвеса в направлении местной вертикали. Вектор кинетического момента Н гироскопического чувствительного элемента 5 удерживается перпендикулярно оси внутренней рамы 1 карданова подвеса (а следовательно, удерживается в горизонтальной плоскости) за счет работы системы горизонтальной коррекции, включающей в себя датчик угла 7, усилитель привода в меридиан 23, первый ограничитель 24 и датчик момента 9, задающий прецессию вектора кинетического момента гироскопического чувствительного элемента 5, вокруг второй измерительной оси.
При работе системы в режиме самоориентирования с одного из выходов цифрового устройства 26 поступает сигнал, замыкающий контакт К1 переключателя режимов, а с другого выхода - сигнал, размыкающий контакт К2, и работает схема приведения, включающая в себя датчик угла 7, усилитель привода в меридиан 23, ограничители 24 и 25, датчики момента 8 и 9.
В этом случае в цепь горизонтальной коррекции дополнительно включается второй ограничитель 25, при подключении которого горизонтальная коррекция ослабляется.
Воздействие горизонтальной составляющей угловой скорости вращения Земли в условиях слабой коррекции приводит к отклонению вектора кинетического момента Н гироскопического чувствительного элемента 5 от горизонтальной плоскости на величину, пропорциональную проекции горизонтальной составляющей угловой скорости вращения Земли на вторую измерительную ось гироскопического чувствительного элемента 5.
Воздействие отклонения, измеряемого датчиком угла 7, на схему приведения приводит к тому, что вектор кинетического момента Н гироскопического чувствительного элемента 5, а вместе с ним, за счет работы азимутальной коррекции, включающей в себя датчик угла 6, усилитель стабилизации 4 и датчик стабилизирующего момента 3, внутренняя рама 1 карданова подвеса, прецессируют до тех пор, пока проекция горизонтальной составляющей угловой скорости вращения Земли на вторую измерительную ось гироскопического чувствительного элемента 5 не станет равной нулю. Установившееся положение внутренней рамы 1 соответствует малой величине сигнала на выходе схемы приведения и ориентированию вектора кинетического момента Н в направлении меридиана.
Сигнал об азимуте снимается с датчика угла курса 2, и, далее, с выхода преобразователя угол-код 28 в цифровом виде поступает на вход цифрового устройства 26 и с его выхода - внешнему потребителю.
Воздействие динамических ошибок блока горизонтального в результате колебаний корпуса системы вместе с объектом при его возмущениях приводит к появлению дополнительного сигнала (напряжения) на выходе схемы приведения (выходе датчика угла 7), которое отрабатывается гироскопическим чувствительным элементом 5 в азимуте.
В результате внутренняя рама 1 отклоняется от направления меридиана. Указанное отклонение с выхода датчика угла курса 2 как ошибка определения азимута поступает на вход цифрового устройства 26 и далее внешнему потребителю.
Для уменьшения дополнительной ошибки определения азимута на заключительной стадии приведения, характеризующейся малым (при отсутствии возмущений со стороны блока горизонтального) уровнем сигнала на выходе схемы приведения, работает компаратор 27, который формирует сигнал управления в зависимости от текущего значения напряжения на выходе схемы приведения по релейному закону вида
где u - напряжение на выходе схемы приведения, uc - сигнал управления, umax - уровень срабатывания компаратора.
При превышении заданного уровня срабатывания сигнал управления с выхода компаратора 27 поступает на вход цифрового устройства 26, в котором непосредственно либо после передачи информации о сигнале управления внешним потребителем на одном из выходов цифрового устройства 26 вырабатывается сигнал, размыкающий контакт К1 переключателя режимов, переводя блок азимутальный в режим хранения направления, обеспечивая отсутствие реакции блока азимутального на возмущение со стороны блока горизонтального.
После того как напряжение на выходе схемы приведения станет меньше по модулю уровня срабатывания компаратора 27 (закончилось возмущение со стороны блока горизонтального), схема приведения возвращается в исходное состояние.
Наличие раздельного управления контактом К2 с дополнительного выхода цифрового устройства 26 позволяет задать постоянную (независимо от переключении контакта К1, как при наличии, так и при отсутствии возмущений со стороны блока горизонтального) работу цепи горизонтальной коррекции блока азимутального при подключенном втором ограничителе 25 (в условиях слабой коррекции) на все время определения азимута в режиме гирокомпаса.
Таким образом, предлагаемое устройство за счет отключения схемы приведения от гироскопического чувствительного элемента 5 на время действия возмущений со стороны блока горизонтального, вызванных в свою очередь колебаниями объекта, позволяет повысить точность определения азимута системой самоориентирующейся гироскопической курсокреноуказания в режиме гирокомпаса.
Управление включением компаратора 27 на заключительной стадии приведения (по истечении определенного времени с начала процесса самоориентирования) осуществляется программным устройством, которое пропускает сигнал с выхода компаратора 27 на вход цифрового устройства 26 через определенное время. Функции программного устройства может выполнять само цифровое устройство 26 либо устройства в составе внешнего потребителя. В последнем случае внешний потребитель получает сигнал компаратора 27 с выхода цифрового устройства 26, осуществляет подсчет времени с начала процесса самоориентирования, в соответствии с которым и сигналом компаратора 27 осуществляет управление контактом К1 переключателя режимов.
При реализации заявляемого устройства в качестве гироскопических чувствительных элементов системы самоориентирующейся гироскопической курсокреноуказания могут использоваться динамически настраиваемые гироскопы. При этом у динамически настраиваемого гироскопа на одной оси чувствительности может быть более одного датчика момента, например, основной и компенсационный. Выбор конкретных датчиков для подключения осуществляется в зависимости от характеристик и конструкции конкретного чувствительного элемента.
В качестве датчиков угла курса, тангажа, крена может быть применен любой датчик, предназначенный для преобразования угла механического поворота в электрический сигнал, например, типов СКТД, ВТ.
Преобразователь угол-код может быть любого типа, обеспечивающий преобразование сигнала с выхода датчиков угла в цифровой код.
Переключатель режимов может быть реализован на коммутирующих устройствах механического или электронного типа: реле или электронных коммутаторах.
Функции ограничителей могут выполнять электронные устройства или их набор. Простейшим вариантом их реализации могут являться резисторы или их набор.
В качестве датчика стабилизирующего момента могут быть использованы различные механические датчики момента постоянного или переменного тока.
Датчиками наклона могут быть маятниковые жидкостные датчики, акселерометры.
Функции цифрового устройства могут выполнять электронные устройства, способные осуществлять обмен с внешним устройством, формировать на соответствующих выходах сигналы управления.
Усилительные устройства могут быть выполнены на основе широко известных схем электронных устройств.
Предлагаемое устройство может быть использовано при разработке автономных систем навигации и топопривязки и позволяет повысить точность определения исходного азимута в автономных навигационных системах.
В настоящее время в "ГУП ВНИИ "Сигнал" в соответствии с заявляемой схемой устройства испытан макет системы самоориентирующейся гироскопической курсокреноуказания. Результаты испытаний положительны.
Источники информации
1. Богданович М. М. , Ильин П.А. Гироскопические приборы и устройства. Основы теории. - Ленинград: Судпромгиз, 1961.
2. Патент ФРГ 3033280, кл. G 01 C 19/34, опубл. 1989.
3. Патент РФ 2124184, МПК6 G 01 C 19/38, приоритет 15.12.96.
| название | год | авторы | номер документа |
|---|---|---|---|
| САМООРИЕНТИРУЮЩАЯСЯ ГИРОСКОПИЧЕСКАЯ СИСТЕМА КУРСОКРЕНОУКАЗАНИЯ | 1999 |
|
RU2166733C1 |
| СИСТЕМА САМООРИЕНТИРУЮЩАЯСЯ ГИРОКУРСОКРЕНОУКАЗАНИЯ | 1999 |
|
RU2165074C1 |
| СИСТЕМА КУРСОКРЕНОУКАЗАНИЯ | 2000 |
|
RU2171450C1 |
| СИСТЕМА САМООРИЕНТИРУЮЩАЯСЯ ГИРОСКОПИЧЕСКАЯ КУРСОКРЕНОУКАЗАНИЯ | 2004 |
|
RU2274832C1 |
| СИСТЕМА САМООРИЕНТИРУЮЩАЯСЯ ГИРОСКОПИЧЕСКАЯ КУРСОКРЕНОУКАЗАНИЯ | 1996 |
|
RU2124184C1 |
| СИСТЕМА САМООРИЕНТИРУЮЩАЯСЯ ГИРОСКОПИЧЕСКАЯ КУРСОКРЕНОУКАЗАНИЯ (ВАРИАНТЫ) | 2006 |
|
RU2316730C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ УГЛА КУРСА ОБЪЕКТА И САМООРИЕНТИРУЮЩАЯСЯ ГИРОСКОПИЧЕСКАЯ СИСТЕМА КУРСОУКАЗАНИЯ | 2000 |
|
RU2186338C1 |
| САМООРИЕНТИРУЮЩАЯСЯ СИСТЕМА ГИРОКУРСОКРЕНОУКАЗАНИЯ | 2001 |
|
RU2192622C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ АЗИМУТА В СИСТЕМАХ НАВИГАЦИИ, ТОПОПРИВЯЗКИ, НАВЕДЕНИЯ И ПРИЦЕЛИВАНИЯ (ВАРИАНТЫ) | 2001 |
|
RU2184936C1 |
| СИСТЕМА КУРСОКРЕНОУКАЗАНИЯ | 2003 |
|
RU2258205C1 |
Использование: при разработке и изготовлении приборов для систем стабилизации, навигации и топопривязки объектов наземной техники. Сущность: система содержи блок азимутальный, блок горизонтальный, управляющее устройство, преобразователь угол-код, в свою очередь содержащих карданов подвес, гироскопические чувствительные элементы, датчики угла, датчики момента, датчики наклона, усилители, переключатель режимов с первым и вторым контактами, ограничители, цифровое устройство, компаратор. Технический результат: повышение точности определения исходного азимута системой самоориентирующейся гироскопической курсокреноуказания в условиях внешних возмущений ее корпуса при работе на подвижном объекте, что достигается за счет отключения схемы приведения от гироскопического чувствительного элемента блока азимутального на время действия возмущений со стороны блока горизонтального по сигналу компаратора, подключенного к выходу схемы приведения. 1 ил.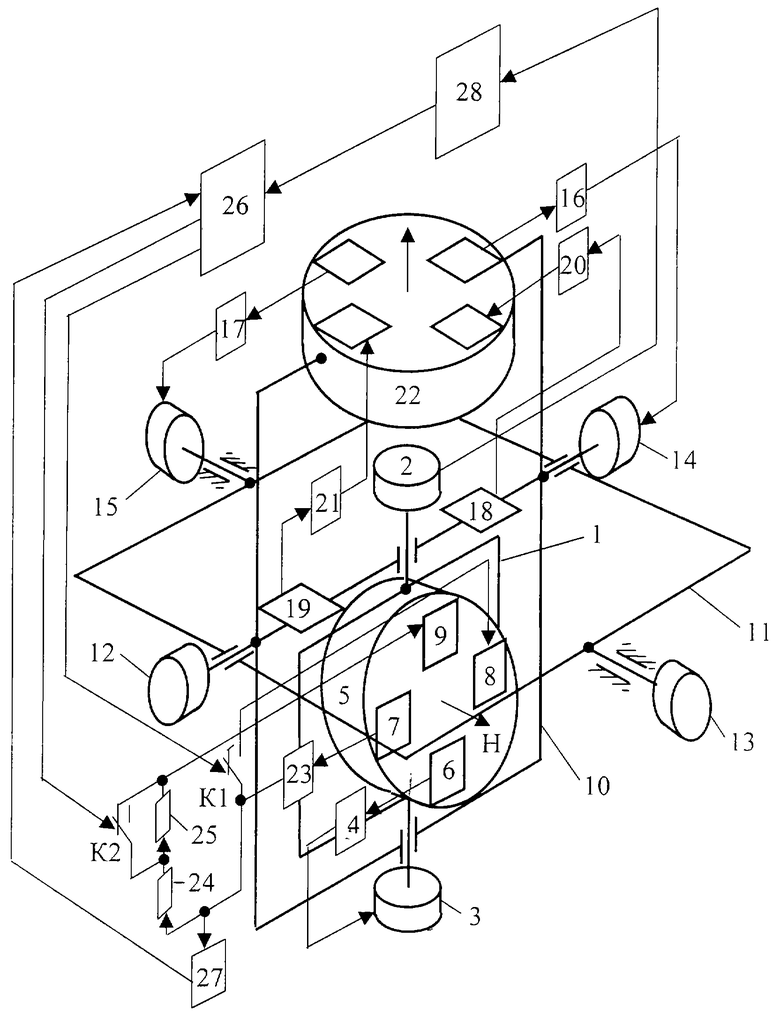
Система самоориентирующаяся гироскопическая курсокреноуказания, содержащая блок азимутальный, состоящий из внутренней рамы карданова подвеса с датчиком угла курса, датчиком стабилизирующего момента, усилителя стабилизации и гироскопического чувствительного элемента, имеющего две измерительные оси, образованные двумя ортогонально размещенными датчиками угла и датчиками момента, причем первая измерительная ось гироскопического чувствительного элемента совпадает с осью внутренней рамы карданова подвеса, а выход датчика угла, установленного на первой измерительной оси гироскопического чувствительного элемента, связан с входом усилителя стабилизации, выход которого связан с датчиком стабилизирующего момента, блок горизонтальный, состоящий из карданова подвеса с датчиками угла тангажа и крена, датчиками стабилизирующего момента, усилителей стабилизации, датчиков наклона, усилителей коррекции и гироскопического чувствительного элемента, управляющее устройство, состоящее из усилителя привода в меридиан, переключателя режимов с первым и вторым контактами, двух ограничителей и цифрового устройства, и преобразователь угол-код, отличающаяся тем, что в систему самоориентирующуюся гироскопическую курсокреноуказания введен компаратор, вход которого через усилитель привода в меридиан связан с выходом датчика угла, установленного на второй измерительной оси гироскопического чувствительного элемента блока азимутального, а выход - с входом цифрового устройства, первый выход которого связан с управляющим входом первого контакта переключателя режимов, а второй выход - с управляющим входом второго контакта переключателя режимов.
| СИСТЕМА САМООРИЕНТИРУЮЩАЯСЯ ГИРОСКОПИЧЕСКАЯ КУРСОКРЕНОУКАЗАНИЯ | 1996 |
|
RU2124184C1 |
| САМООРИЕНТИРУЮЩАЯСЯ ГИРОСКОПИЧЕСКАЯ СИСТЕМА КУРСОКРЕНОУКАЗАНИЯ | 1999 |
|
RU2166733C1 |
| Головка симметричного между вагонного штепсельного соединения для электрических проводов | 1928 |
|
SU13422A1 |
| DE 3019372 A, 26.11.1981 | |||
| Способ приготовления хромового катализатора для деструктивного дегидрирования | 1936 |
|
SU48212A1 |

