Изобретение относится к области измерительной техники и может быть использовано при разработке и изготовлении приборов для стабилизации, навигации и топопривязки объектов наземной техники.
Известна система самоориентирующаяся гироскопическая курсокреноуказания [1] , которая представляет собой курсовую гироскопическую систему на базе гироскопических чувствительных элементов, работающая в режиме выработки сигналов об изменении (приращении) углов курса (режим удержания заданного азимутального направления или гироазимута), крена и тангажа объекта во время его движения и стоянки и в режиме определения азимута (режим самоориентирования или гирокомпаса) во время стоянки объекта.
В качестве прототипа использована система самоориентирующаяся гироскопическая курсокреноуказания [1].
Система состоит из азимутального блока и горизонтального блока (конструктивно образуют единый гироблок), управляющего устройства, блока преобразования и обработки информации и временного механизма.
За счет работы горизонтального блока ось внутренней рамы карданова подвеса удерживается по направлению вертикали места.
За счет работы управляющего устройства и азимутального блока вектор кинетического момента гироскопического чувствительного элемента азимутального блока удерживается в плоскости горизонта в фиксированном направлении (в режиме гироазимута) или в направлении меридиана (в режиме гирокомпаса). При этом с датчиков угла курса, крена, тангажа снимается информация об изменениях курсового угла, углов поперечного и продольного наклона объекта соответственно.
Временной механизм управляет режимами работы блока преобразования и обработки информации, в который поступает информация с датчиков угла курса, крена, тангажа. Недостаток системы самоориентирующейся гироскопической курсокреноуказания [1] заключается в сравнительно низкой точности определения азимута заданного направления при колебаниях корпуса объекта, вызванных действием на объект внешних возмущений (ветровые нагрузки, перемещение экипажа по объекту, работа двигателя и др.).
Изобретение направлено на повышение точности определения начального азимута заданного направления за счет уменьшения погрешности от действия на объект внешних возмущений.
Это достигается тем, что в управляющее устройство самоориентирующейся гироскопической системы курсокреноуказания, содержащей азимутальный блок, состоящий из внутренней рамы карданова подвеса с датчиком угла курса, датчиком стабилизирующего момента, усилителя стабилизации и гироскопического чувствительного элемента, по ортогональным измерительным осям которого установлены датчики угла и датчики момента, причем первая измерительная ось гироскопического чувствительного элемента совпадает с осью внутренней рамы карданова подвеса, а выход датчика угла, установленного на первой измерительной оси гироскопического чувствительного элемента, связан с входом усилителя стабилизации, выход которого связан с датчиком стабилизирующего момента, горизонтальный блок, состоящий из карданова подвеса с датчиками угла тангажа и крена, датчиками стабилизирующего момента, датчиками наклона и гироскопического чувствительного элемента, по ортогональным измерительным осям которого установлены датчики угла и датчики момента, управляющее устройство, включающее усилитель привода в меридиан, коммутирующее устройство, датчик широтной поправки и два ограничителя, блок преобразования и обработки информации и временной механизм для управления режимами работы блока преобразования и обработки информации с датчиков угла курса, крена и тангажа, выход усилителя привода в меридиан соединен с первым контактом коммутирующего устройства, выход датчика угла, установленного на второй измерительной оси гироскопического чувствительного элемента азимутального блока, связан через усилитель привода в меридиан, ограничители и второй контакт коммутирующего устройства с соответствующим датчиком момента гироскопического чувствительного элемента азимутального блока, введены два пороговых устройства, схема ИЛИ, два реле, при этом первый нормально замкнутый контакт первого реле связан с выходом первого контакта коммутирующего устройства, а второй нормально замкнутый контакт первого реле связан с входом датчика момента гироскопического чувствительного элемента азимутального блока, вход обмотки первого реле связан с первым нормально разомкнутым контактом второго реле, а второй контакт второго реле связан с выходом схемы ИЛИ, вход обмотки второго реле связан с выходом временного механизма, входы схемы ИЛИ связаны с выходами пороговых устройств, входы первого порогового устройства связаны с выходом первого датчика момента гироскопического чувствительного элемента горизонтального блока, а входы второго порогового устройства связаны с выходом второго датчика момента гироскопического чувствительного элемента горизонтального блока.
Сущность предлагаемого изобретения поясняется с помощью чертежа (фиг. 1), на котором представлена схема предлагаемой самоориентирующейся гироскопической системы курсокреноуказания.
Самоориентирующаяся гироскопическая система курсокреноуказания состоит из азимутального блока, горизонтального блока, управляющего устройства, блока преобразования и обработки информации и временного механизма.
Азимутальный блок представляет собой внутреннюю раму 1 карданова подвеса, на которой установлены датчик угла курса 2, датчик стабилизирующего момента 3 и гироскопический чувствительный элемент 4, в котором датчики угла 5, 6 и датчики момента 7, 8 установлены по ортогональным измерительным осям гироскопического чувствительного элемента 4. При этом одна ось гироскопического чувствительного элемента 4 совпадает с осью внутренней рамы карданова 1 подвеса. Азимутальный блок включает в себя также усилитель стабилизации 9.
Горизонтальный блок представляет собой среднюю 10 и наружную 11 рамы карданова подвеса. На средней раме 10 установлены датчик угла тангажа 12, датчик стабилизирующего момента 13, датчики наклона 14, 15 и гироскопический чувствительный элемент 16. На наружной раме 11 установлен датчик угла крена 17 и датчик стабилизирующего момента 18. У гироскопического чувствительного элемента 16 по ортогональным измерительным осям установлены датчики угла 19, 20 и датчики момента 21, 22.
Управляющее устройство состоит из усилителя привода в меридиан 23, двух ограничителей 24, 25, коммутирующего устройства (на рисунке не показано) с первым К1 и вторым К2 контактами, датчика широтной поправки 26, двух пороговых устройств (например, сдвоенных компараторов) 27,28, двух реле 29, 30 и схемы ИЛИ 31.
Временной механизм 32 управляет режимами работы блока преобразования и обработки информации 33, в который поступает информация с датчиков угла курса 2, крена 17, тангажа 12.
Датчики наклона 14, 15, усилители 34, 35, датчики момента 21, 22 и ограничители 36,37 определяют характеристики цепей горизонтальной коррекции.
Самоориентирующаяся гироскопическая система курсокреноуказания работает следующим образом.
За счет работы горизонтального блока оси X2-X2 и Z2-Z2 гироскопического чувствительного элемента 16 горизонтального блока удерживаются в плоскости горизонта, а ось Z1-Z1 гироскопического чувствительного элемента 4 азимутального блока удерживается в направлении местной вертикали. При этом сигналы об углах наклона объекта снимаются с датчика угла крена 17 и датчика угла тангажа 12.
В режиме удержания заданного азимутального направления (режим гироазимута при стоянке и при движении объекта) первый контакт К1 коммутирующего устройства разомкнут, а второй контакт К2 замкнут. Для удержания вектора кинетического момента H1 гироскопического чувствительного элемента 4 в плоскости горизонта используется горизонтальная коррекция: сигнал с датчика угла 5, пропорциональный углу отклонения вектора кинетического момента H1 от плоскости горизонта, через усилитель 23, ограничитель 24 и контакт К2 поступает на датчик момента 8, который устраняет указанное отклонение.
Азимутальная коррекция используется для устранения отклонения внутренней рамы 1 карданова подвеса относительно оси Z1-Z1. Сигнал с датчика угла 6, пропорциональный углу отклонения, через усилитель стабилизации 9 поступает на датчик стабилизирующего момента 3, который устраняет указанное отклонение.
Сигнал о курсе объекта снимается с датчика угла курса 2, затем преобразуется и по сигналу с временного механизма 32 обрабатывается в блоке преобразования и обработки информации 33.
В режиме самоориентирования (в режиме гирокомпаса при стоянке объекта) первый контакт К1 коммутирующего устройства замкнут, а второй контакт К2 разомкнут. В цепь горизонтальной коррекции датчик угла 5 - усилитель 23 - ограничитель 24 - датчик момента 8 подключается ограничитель 25, при этом крутизна горизонтальной коррекции уменьшается и вектор кинетического момента H1 гироскопического чувствительного элемента 4 отклоняется от плоскости горизонта под действием горизонтальной составляющей угловой скорости вращения Земли на угол β, пропорциональный синусу угла а между плоскостью меридиана и плоскостью, содержащей вектор кинетического момента H1 гироскопического чувствительного элемента 4 и вектор вертикальной составляющей угловой скорости вращения Земли. Сигнал с датчика угла 5, пропорциональный углу β, через усилитель привода в меридиан 23 и первый контакт К1 коммутирующего устройства поступает на датчик момента 7 гироскопического чувствительного элемента 4. Под действием указанного момента вектор кинетического момента H1 гироскопического чувствительного элемента 4 стремится совместиться с плоскостью меридиана и после окончания переходного процесса устанавливается в направлении на Север. При этом с датчика угла курса 2 снимается сигнал о курсовом угле объекта, который преобразуется и по сигналу с временного механизма 32 проходит обработку в блоке преобразования и обработки информации 33, после чего представляет информацию об истинном азимуте объекта.
Действие на объект внешних возмущений приводит к колебаниям корпуса системы. Появившиеся при этом на датчиках наклона 14, 15 сигналы, пройдя через усилители коррекции 34, 35, поступают на датчики момента 21, 22 гироскопического чувствительного элемента 16. Это приводит к увеличению сигналов на датчиках моментов 21, 22 гироскопического чувствительного элемента 16. Под действием указанного момента вектор кинетического момента Н2 гироскопического чувствительного элемента 16 отклоняется от направления местной вертикали.
Сигналы с датчиков углов 19, 20, пропорциональные углам отклонения вектора кинетического момента Н2 гироскопического чувствительного элемента 16 от направления местной вертикали, через усилители стабилизации (на рисунке не показаны) поступают на датчики стабилизирующего момента 13, 18, которые устраняют указанное отклонение.
Если сигнал на выходе датчика момента 21 или 22 (или на обоих одновременно) гироскопического чувствительного элемента 16 превысит определенное значение, величина которого может регулироваться соответствующим ограничителем 36 или 37, на выходе соответствующего сдвоенного компаратора 27 или 28 появляется сигнал, который открывает схему ИЛИ 31. В результате на выходе схемы ИЛИ 31 появляется сигнал.
В определенный момент времени с временного механизма 32 на обмотку реле 30 поступает сигнал, замыкающий контакт К3 реле 30, и на обмотку реле 29 с выхода схемы ИЛИ 31 поступает сигнал, размыкающий контакт К4 реле 29. Происходит отключение датчика момента 7 гироскопического чувствительного элемента 4 от усилителя привода в меридиан 23. В результате, вектор кинетического момента H1 гироскопического чувствительного элемента 4 не отклоняется от плоскости меридиана под действием сигнала, вызванного действием на объект внешних возмущений и превышающего допустимое значение.
В результате, погрешность определения азимута заданного направления уменьшается.
В случае, когда сигналы на выходе датчиков момента 21 и 22 гироскопического чувствительного элемента 16 ниже установленного значения, контакт К4 реле 29 замкнут.
В качестве гироскопических чувствительных элементов как азимутального блока, так и горизонтального блока, могут быть использованы динамически настраиваемые гироскопы, например, типа ГВК (гироскоп с внутренним карданом) или модуляционные гироскопы и другие. При этом допускается использование в одной системе гироскопических чувствительных элементов различного типа, например, в азимутальном блоке - модуляционного гироскопа, а в горизонтальном блоке - динамически настраиваемого гироскопа или наоборот. При этом на одной измерительной оси чувствительного элемента может быть более одного датчика момента, например, в ГВК - основной и компенсационный датчик момента. При этом выбор конкретного датчика для осуществления связей между элементами системы зависит от конкретного чувствительного элемента и его технических характеристик.
В качестве датчиков угла курса, крена, тангажа могут быть использованы датчики любого типа, преобразующие механический угол поворота в электрический сигнал.
В качестве датчиков угла наклона могут быть использованы датчики различного типа, например жидкостные маятниковые переключатели, акселерометры и т.д.
В качестве переключателя режима могут использоваться различные коммутирующие устройства - электромеханические (реле), электронные (на микросхемах и радиоэлементах).
В качестве ограничителей могут использоваться элементы электронного устройства или их набор (простейший пример - резисторы или их набор), позволяющие при изменении режима работы системы изменить (при переходе к режиму самоориентирования уменьшить) крутизну горизонтальной коррекции.
В качестве датчика широтной поправки может использоваться электронное устройство, вырабатывающее электрический сигнал, пропорциональный вертикальной составляющей угловой скорости вращения Земли. Это устройство может быть аналоговым, цифроаналоговым, а также иметь управление извне.
В качестве пороговых устройств могут использоваться, например, сдвоенные компараторы.
В качестве временного механизма может использоваться, например, таймер. Временной механизм может иметь управление извне.
Предлагаемое изобретение может быть использовано при разработке автономных систем навигации, стабилизации и топопривязки и позволяет повысить точность определения азимута при работе системы в режиме гирокомпаса.
В настоящее время разработаны опытные образцы системы самоориентирующейся гирокурсокреноуказания, которые проходят предварительные испытания, в том числе и на подвижных объектах. Результаты испытаний положительны.
ЛИТЕРАТУРА
1. Патент на изобретение N 2124184 от 15.12.96 "Система самоориентирующаяся гироскопическая курсокреноуказания", МПК6 G 01 C 19/38.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА КУРСОКРЕНОУКАЗАНИЯ | 2000 |
|
RU2171450C1 |
| СИСТЕМА САМООРИЕНТИРУЮЩАЯСЯ ГИРОКУРСОКРЕНОУКАЗАНИЯ | 1999 |
|
RU2165074C1 |
| СИСТЕМА САМООРИЕНТИРУЮЩАЯСЯ ГИРОСКОПИЧЕСКАЯ КУРСОКРЕНОУКАЗАНИЯ | 2001 |
|
RU2207506C1 |
| СИСТЕМА САМООРИЕНТИРУЮЩАЯСЯ ГИРОСКОПИЧЕСКАЯ КУРСОКРЕНОУКАЗАНИЯ | 2004 |
|
RU2274832C1 |
| СИСТЕМА САМООРИЕНТИРУЮЩАЯСЯ ГИРОСКОПИЧЕСКАЯ КУРСОКРЕНОУКАЗАНИЯ | 1996 |
|
RU2124184C1 |
| НАЗЕМНАЯ НАВИГАЦИОННАЯ СИСТЕМА | 1999 |
|
RU2165075C1 |
| СИСТЕМА ГИРОКУРСОКРЕНОУКАЗАНИЯ | 2001 |
|
RU2186339C1 |
| СИСТЕМА КУРСОКРЕНОУКАЗАНИЯ | 2003 |
|
RU2258205C1 |
| СИСТЕМА САМООРИЕНТИРУЮЩАЯСЯ ГИРОСКОПИЧЕСКАЯ КУРСОКРЕНОУКАЗАНИЯ (ВАРИАНТЫ) | 2006 |
|
RU2316730C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ УГЛА КУРСА ОБЪЕКТА И САМООРИЕНТИРУЮЩАЯСЯ ГИРОСКОПИЧЕСКАЯ СИСТЕМА КУРСОУКАЗАНИЯ | 2000 |
|
RU2186338C1 |
Система может быть использована при разработке и изготовлении приборов для стабилизации, навигации и топопривязки объектов наземной техники. Система состоит из азимутального и горизонтального блоков, содержащих карданов подвес, гироскопические чувствительные элементы, датчики угла, датчики момента, усилители, динамически настраиваемые гироскопы, управляющего устройства, блока преобразования и обработки информации и временного механизма. В управляющее устройство введены два пороговых устройства, схема ИЛИ, два реле, при этом первый нормально замкнутый контакт первого реле связан с выходом первого контакта коммутирующего устройства, а второй нормально замкнутый контакт первого реле связан с входом датчика момента чувствительного элемента азимутального блока, вход обмотки первого реле связан с первым нормально разомкнутым контактом второго реле, а второй контакт второго реле связан с выходом схемы ИЛИ. Вход обмотки второго реле связан с выходом цифрового устройства. Входы схемы ИЛИ связаны с выходами пороговых устройств. Входы первого порогового устройства связаны с выходом первого датчика момента чувствительного элемента горизонтального блока, а входы второго порогового устройства связаны с выходом второго датчика момента. Обеспечивается повышение точности определения азимута. 1 ил.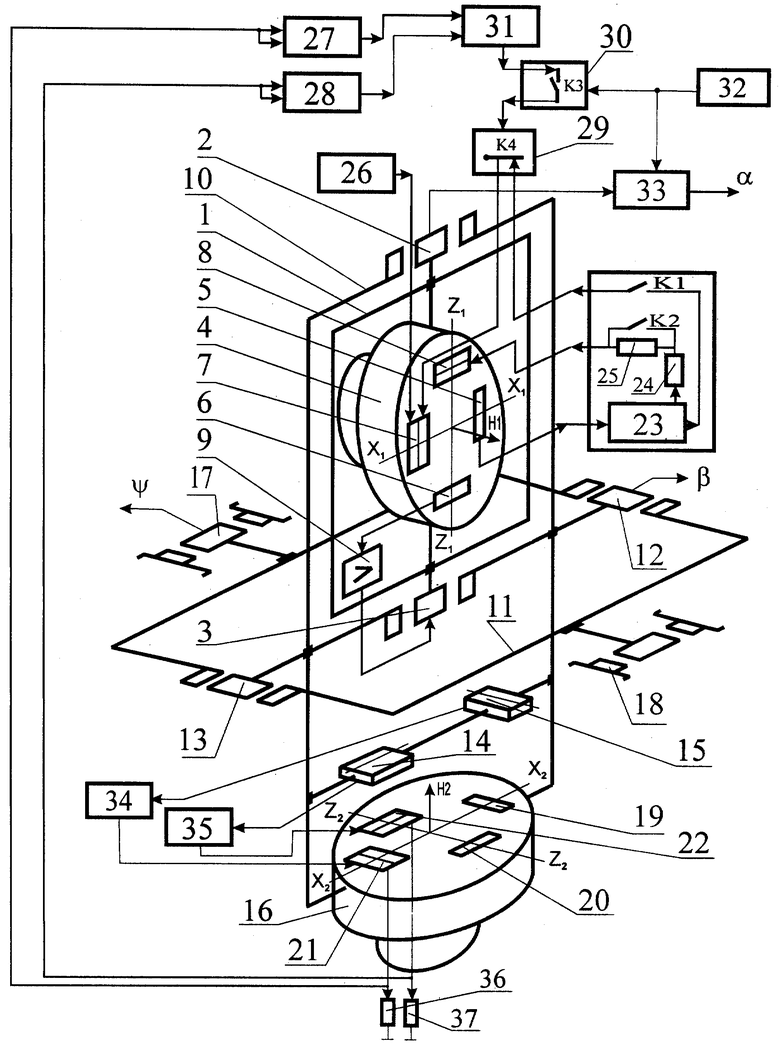
Самоориентирующаяся гироскопическая система курсокреноуказания, содержащая азимутальный блок, состоящий из внутренней рамы карданова подвеса с датчиком угла курса, датчиком стабилизирующего момента, усилителя стабилизации и гироскопического чувствительного элемента, по ортогональным измерительным осям которого установлены датчики угла и датчики момента, причем первая измерительная ось гироскопического чувствительного элемента совпадает с осью внутренней рамы карданова подвеса, а выход датчика угла, установленного на первой измерительной оси гироскопического чувствительного элемента, связан с входом усилителя стабилизации, выход которого связан с датчиком стабилизирующего момента, горизонтальный блок, состоящий из карданова подвеса с датчиками угла тангажа и крена, датчиками стабилизирующего момента, датчиками наклона и гироскопического чувствительного элемента, по ортогональным измерительным осям которого установлены датчики угла и датчики момента, управляющее устройство, включающее усилитель привода в меридиан, коммутирующее устройство, датчик широтной поправки и два ограничителя, блок преобразования и обработки информации и временной механизм для управления режимами работы блока преобразования и обработки информации с датчиков угла курса, крена и тангажа, выход усилителя привода в меридиан соединен с первым контактом коммутирующего устройства, выход датчика угла, установленного на второй измерительной оси гироскопического чувствительного элемента азимутального блока связан через усилитель привода в меридиан, ограничители и второй контакт коммутирующего устройства с соответствующим датчиком момента гироскопического чувствительного элемента азимутального блока, отличающаяся тем, что в управляющее устройство введены два пороговых устройства, схема ИЛИ, два реле, при этом первый нормально замкнутый контакт первого реле связан с выходом первого контакта коммутирующего устройства, а второй нормально замкнутый контакт первого реле связан с входом датчика момента гироскопического чувствительного элемента азимутального блока вход обмотки первого реле вязи с первым нормально разомкнутым контактом второго реле, а второй контакт второго реле связан с выходом схемы ИЛИ, вход обмотки второго реле связан с выходом временного механизма, вход схемы ИЛИ связаны с выходами пороговых устройств, входы первого порогового устройства связаны с выходом первого датчика момента гироскопического чувствительного элемента горизонтального блока, а входы второго порогового устройства связаны с выходом второго датчика момента гироскопического чувствительного элемента горизонтального блока.
| СИСТЕМА САМООРИЕНТИРУЮЩАЯСЯ ГИРОСКОПИЧЕСКАЯ КУРСОКРЕНОУКАЗАНИЯ | 1996 |
|
RU2124184C1 |
| ГИРОГОРИЗОНТКОМПАС ДЛЯ ПОДВИЖНОГО ОБЪЕКТА | 1993 |
|
RU2062985C1 |
| ГИРОКОМПАС | 1992 |
|
RU2079106C1 |
| DE 3033280 A, 20.01.1982 | |||
| US 4472978, 25.09.1984. | |||

