1
Изобретение относится к измерительной технике и предназначено для измерения скорости вращения или поступательного перемещения подвижных объектов.
Известны устройства,- измерения скорости, основанные на измерении угла поворота вала исследуемого механизма или участка пути за фиксированный интервал времени ВД
Известен также цифровой измеритель угловой скорости, содержащий дискретный датчик скорости, ключи, генератьр эталонной частоты, делители, счетчик импульсов, в котором величина измеряемой скорости определяется в результате подсчета числа импульсов дискретного датчика скорости за фиксированный интервал времени Т23.
Недостатком таких устройств является низкая точность измерения угловой скорости, обусловленная динамической погрешностью, которая наиболее сильно проявляется при нестациэнарных режимах работы исследуемого механизма
Цель изобретения - повышение точности измерения путем исключения динамической погрешности.
Поставленная цель достигается тем, что в устройство введены четыре регистра памяти, два блока умножений и сумматор, причем выход счетчика импульсов подключен к информационному входу первого регистра памяти, выход которого, соединен с информационными входами первого блока;умножения и второго регистра памяти, выход
to которого подключен к информационным входам второго блока умножения и третьего регистра памяти, выход которого соединен с третьим входом сумматора, второй вход которого подключен
ts к выходу второго блока у$лножения,первый вход - к выходу первого блока умножения, а выход - к информационному входу четвертого регистра пг1мяти, йри этом второй выход блока управле20ния соединен с установочным входом первого регистра памяти, третий выход - с установочным входом первого блока .умножения, четвертый выход с установочным входом второго регист25ра памяти, пятый выход - с установочным входом второго блока умножения, шестой выход - с установочным входом третьего регистра памяти, а седьмой выход - с установочным входом чет;3(i вертого регистра памяти.
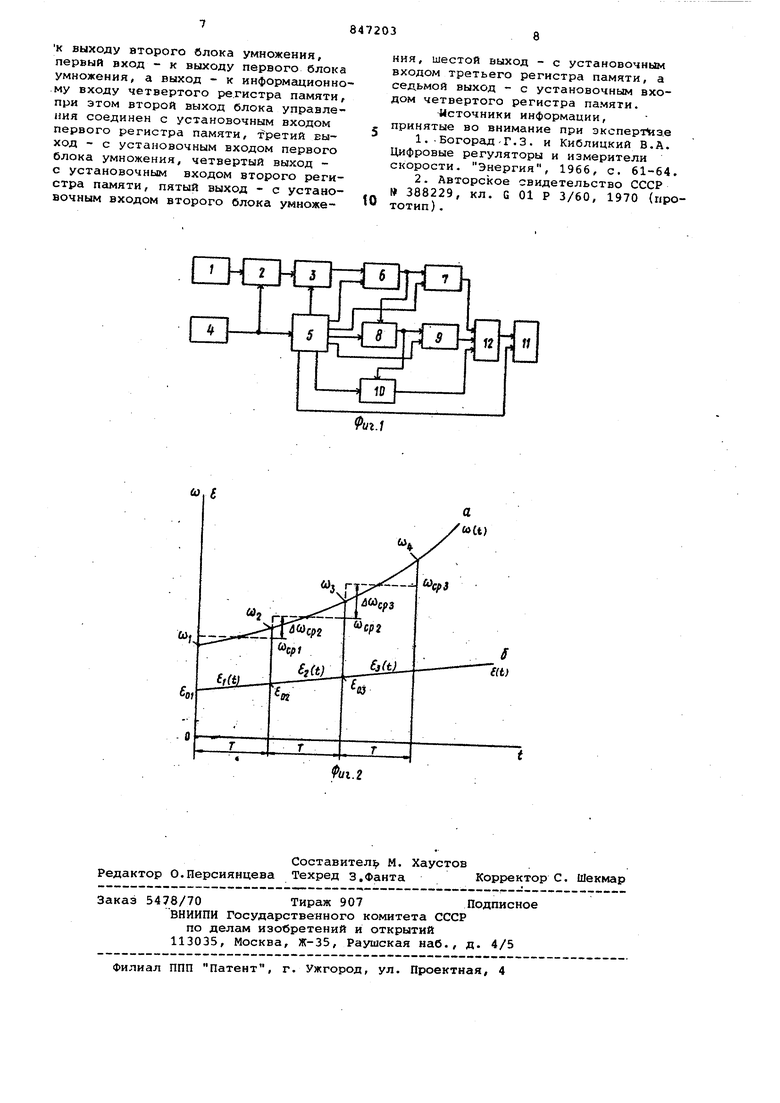
На фиг.1 изображена блок-схема устройства на фиг. 2 - кривая изменения скорости механизма при нестационарном движении {линия о ) и кривая изменения ускорения механизма (линия д ) .
Выход дискретного преобразователя
Iугла соединен с первым входом ключа 2, выход которого соединен со сче,чином 3. Генератор 4 временных интер,валов подключен ко второму входу ключа 2 и к входу блока 5 управления. Первый выход блока 5 управления соединен с ус-тановоуным входом счетчика 3, вторюй выход - с управляющим входом первого регистра б памяти, третий - с управляквдим входом первого блока 7 умножения, четвертый - с управляющим входом второго регистра 8 памяти, пятый - с управля ощим входом второго 9 умножения, шестой - с управляющим входом третьего регистра 10 памяти, седьмой - с управляющим входом четвертого регистра
IIпамяти. Выход счетчика 3 подключен к информационному входу первого регистра б памяти, выход которого соединен с информационными входами первого блока 7 умножения и второго регистра 8 памяти. Выход второго регистра 8 памяти соединен с информационными входами второго блока 9 умножения и третьего регистра 10 памяти. Выходы первого блока 7 умножения, второго блока 9 умножения и третьего регистра 10 памяти -подключены соответственно к первому, вторсзму и третьему входам сумматора 12, выход которого соединен с информационным входом четвертого регистра 11 памяти.
Устройство работает следующим образом.
В исходном состоянии ключ 2 закрыт и на вход счетчика 3 импульсов сигнал от дискретного преобразователя 1 угла не поступает. С приходом первого импульса генератора 4 временных интервалов открывается ключ 2 и на .вход счетчика 3 импульсов поступает сигнал с дискретного- преобразователя 1 угла. По окончании импульса генератора 4, длительность которого равна Т/ ключ 2 закрывается и на выходе счетчика 3 появляется число N, определяющее среднее значение скорости объекта за время Т 2Jr
)
Д
с-р
Где Z - число импульсов, вырабатываемое дискретным преобразователем угла заодин оборот. По заднему фронту импульса генератора 4 временных интервалов в блоке 5 управления формируется серия коротких импульсов, первый из которых осуществляет перепись информации из второго регистра 8 памяти в третий регистр 10 памяти, второй переводит
информацию из первого регистра б памяти во второй регистр 8 памяти, третий импульс - с выхода второго регистра 8 памяти во второй блок 9 умножения четвертый - с выхода счетчика 3 в первый регистр б памяти пятый - с выхода первого регистра 6 памяти в первый блок 7 умножения, шестой - с выхода сумматора 12 в четвертый регистр 11 памяти.
После первого измерения счетчик 3 содержит информацию о среднем значении скорости на первом интервале измерения Т (показания счетчика М). Перезапись этой информации осуществляется только четвертым импульсом с блока 5 управления в первый регистр 6 памяти и пятым импульсом управления - в первый блок 7 умножения. В блоке умножения происходит умножение поступившего числа N на 4. Импульсы блока 5 управления с .первого по третийне изменяют показания соответствующих узлов, так как последние не имеют пока информации о скорости вращения. Шестой импульс блока 5 управления переносит инф.ормацию сумматора 12 в регистр 11 памяти..
Затем счетчик импульсов 3 устанавливается в нулевое положение и начи-нается режим счета импульсов на втором интервале измерения Т (показания счетчика N,, ) . По завершении счета на интервале Т первый импульс .блока управления не изменяет состояния регистра 10, второй импульс переписывает показания регистра б -памяти, представленное числом N , в регистр 8 памяти, третий импульс переносит число N. в блок 9 умножения, где осуществляется умножение числа на 3, четвертый импульс записывает показания счетчика 3 в регистр 6 памяти и пятый импульс переписывает показания счетчика N из регистра б памяти в блок 7 умножения.
На выходе сумматора 12 в конце второго интервала измерения формируется алгебраическая сумма следующего вида . IINs4N/j-3N
По второму входу сумматора 12 число подается со знаком минус. Шестой импульс переносят информацию сумматора 12 в регистр 11 памяти.
После установки счетчика 3 в нулевое положение начинается подсчет числа импульсов на третьем интервале измерения ,Т (показания счетчика Nj), по завершении которого первый импульс блока 5 управления записывает показания регистра 8 памяти в виде числе N в регистр 10 памяти, второй импульс записывает показания регистра 6 памяти в виде числа N в регистр 8 памяти, третий импульс записывает показания регистра 8 памяти в виде числа N/j в блок 9 умножения, четвертый импульс переносит число в регистр 6 памяти, пятый импульс записывает число Ng в блок 7 умнож,ения.
Теперь на выходе сумматора 12 формируется сумма в виде
SN tN3-5Ha- N-i , (2) которая mecTfcJM импульсом блока 5 управления записывается в регистр 11 памяти. Показание регистра 11 памяти определяет .текущее значение скорости, приведенное к концу интервала измерения, т.е. не содержит динамической погрешности. Каждое последующее измерение приводит к изменению показаний блоков измерителя в описанной последовательности и на выходе формируется сумма вида (2).
Покажем , что показания устройства в виде: (2) определяют текущее значение скорости исследуемого механизма и исключают дин;с1мнческую . погрешность. Для этого представим сумму {2)
в. виде слагаемых умноженных Н9 постоянную
(4N3-3N,.N,)|;(N3-«a i:1 3-Mj
(V)()If ( («tPj «tpJi Hp4-H:pa)-{4:Pa- cP4)- «cP4+5 %Pa 5() .
Таким-образом, на в псоде устройства измерения скорости формируется велич-ина скорост:и. с поправками вида дфср,, и (ьи1)|;ря;,-.йШс(. . Первая поправка представляет собой приращение скорости между последним и предыдущим измерением. Вторая поправка определяется как разность двух соседних приращений скорости.
В большинстве производственных механизмов, имеющихЗначительные инерционности., и при малости времени измерения Т можно, достаточно точно апроксимировать кривую .€(t) (фиг.2) участками прямой линии, т.е. представить e(t) .в виде функций , «( (6) где сн начальное значение ускорения на соответствующем участке измерения.
Текущее мгновенное значение скорости механизма в конце интервала измерения определяется формулой
9 W f
о 7-
Среднее знамение скорости на интервале измерения Т равно Tt , . Tt V
cP3 fn%W «a41fe t 9 «a3l F
щ
Ott00. gj
Сравнивая формулы (7) и (8). приходим к выводу, что динамическая . ошибка изме1рения скорости,если не вводятся поправки, может быть знаЧйтельной и определяется выражением
. дд ч-«Ьрз4ес7зт4-г -
Первая поправка в виде разности полностью исключает первое слагаемое динамической ошибки (9).
Действительно -г
(. Ч
lh- 2 lv |A -4||(vxt ,) J-ife
)(T.(,,fie,,T
При выводе последнего соотношеиспользованы формулы ,.
. (п,(
IS
Второе слагаемое динамической- ошики (9) существенно уменьшается попрйвкой Сдог рз-лцАсра.) .
Действительно
20, i cPf %P2 5((€oT г)У (,,)
При выводе этого соотношения использованы следующие формулы 25 , сру(()г; 4(
Подставляя (8), {10), (11) в формулу (4) получим
; . ct,.|xтi(й)
30- сравнивая (7) и (12) приходим к выводу, что вторая поправка устраняет с точностью доJiTi составляющую динамической ошибки, вызванную рывком скорости .X .
35 ,- Таким Образом предлагаемое устройство позволяет измерять текущее значение скорости в конце интервала измерения путем устранения динамической погрешнорти, вызванной рением и рывком.
Формула изобретения
Устройстводля измерения скорости содержсодее генератор временных интер45 валов, выход которого соединен со входом блока управления и входом ключа, второй вход которого подключе к выходу дискретного преобразователя угла, а выход - к входу счетчика 50 импульсо.в,. установочный вход которого соединен с первым выходом блока управления, о т л и ч а -ю щ е е с я тем, что, с целью повышения точности измерения, в него введены четыре региетра памяти, два блока умножения
55 и сумматор, причем выход счётчика импульсОв подключен к информационному входу первого регистра памяти, выт ход котррого соединен с информационными вх9Дамй первого блока умножения iO и второго регистра памяти, выход которого подключен к информационным входам второго блока умножения и третьего регистра памяти, выход которого соединен с третьим входом сумма65 тори, второй вход которого подключен
к выходу второго блока умножения, первый вход - к выходу первого блока умножения, а выход - к информгщионному входу четвертого регистра памяти, при этом второй выход блока управления соединен с установочным входом первого регистра памяти, третий выход - с установочным входом первого блока умножения, четвертый выход с установочным входом второго регистра памяти, пятый выход - с установочным входом второго блока умноже847203
8
ния, шестой выход - с установочным входом третьего регистра памяти, а седьмой выход - с установочнЕлм входом четвертого регистра памяти.
44сточники информации, принятые во внимание при экспертизе
1..Богорад-Г.З. и Киблицкий В.А. Цифровые регуляторы и измерители скорости. Энергия, 1966, с. 61-64.
2. Авторское свидетельство СССР 388229, кл. G 01 Р 3/60, 1970 (прототип) .

| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для измерения скорости | 1979 |
|
SU847202A1 |
| ДИСКРЕТНАЯ СИСТЕМА ОЦЕНИВАНИЯ | 2007 |
|
RU2398258C2 |
| СПЛАЙН-ИНТЕРПОЛЯТОР | 1997 |
|
RU2116669C1 |
| СПЛАЙН-ИНТЕРПОЛЯТОР | 1998 |
|
RU2143131C1 |
| Устройство для обработки и передачи информации учета товарной нефти | 1983 |
|
SU1129625A1 |
| СПЛАЙН-ИНТЕРПОЛЯТОР | 1998 |
|
RU2140099C1 |
| Цифровой коррелятор | 1983 |
|
SU1129621A1 |
| СПЛАЙН-ИНТЕРПОЛЯТОР | 1998 |
|
RU2143132C1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ АБСОЛЮТНОЙ ВЛАЖНОСТИ | 1991 |
|
RU2019821C1 |
| Устройство формирования точной оценки измеряемого параметра | 1983 |
|
SU1100594A1 |
