1
Изобретение относится к измерите.пьной технике и предназначено для измерения скорости вращения или поступательного перемещения подвижных объектов.
Известно устройство измерения, скорости, основанное на определении ijie- . риода сигнала дискретного преобразователя перемещения объекта путем подсчета числа импульсов эталонной частоты за интервалвремени равный периоду следования импульсов дискретного преобразователя перемещения объекта ГО
Основным недостатком известного устройства является низкая точность измерения скорости движения, обусловленная динамической погрешностью,, которая наиболее сильно проявляется при нестационарных режимах работы исследуемого Механизма.
Известно та1кже устройство измерения угловой скорости, работа которого основана на подсчете числа импульсов эталонной uacTOTij за интервал време- . ни, равный периоду сигнала дискретного преобразователя угла. Это устройство содержит дискретный преобразователь угла, формирователь импульсов, генератор этгипонной частоты, счетчик
импульсов и логическую схему управления. Дифференцирующая цепочка по переднему фронту прямоугольного импульса дискретного преобразователя
5 угла включает счетчик импульсов , на
вход которого подаете сигнал эталон. него генератора, по заднему фронту останавливает 5чбтчик и приводит .схему в исходное состояние 2j .
Ю основным недостатком данного устройства является низкая точность 13мереНия, обусловленная динамической погрешностью прибора, который фактически измеряет среднее значение
15 скорости за временной интервал, равный периоду сигнала диск)етного преобразовате.ття угла.
Цель изобретения - повышение точности измерения.
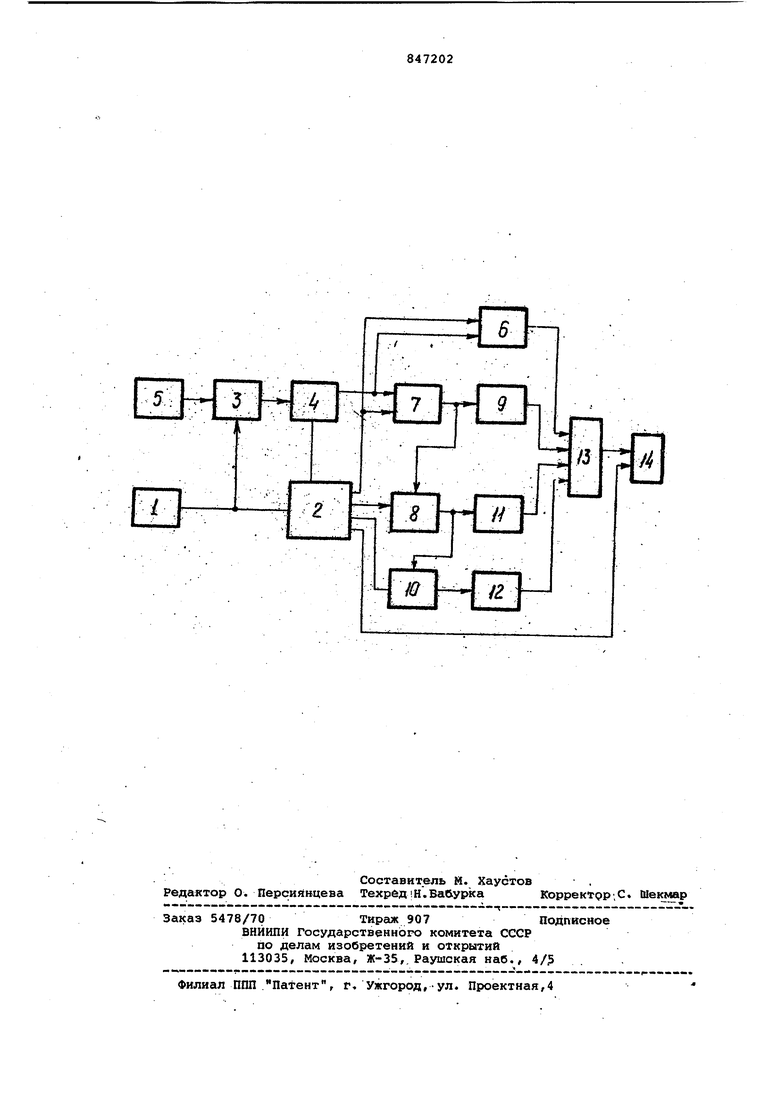
20 Поставленная цель достигается тем, что в устройство введены три блока разности, три блокаДеления, два регистра памяти и сумматор, причем выход счетчика импульсов подключен к инфор25 мацйонным входам первого регистра памяти и блока первой разнести, выход которого соединен со входом первого блока деления и с информационным входом блока второй разности, выход которого подключен ко входу второго блока деления и к информационному входу блока третьей разности,выход которого соединен со входом третьего блока деления, выход которого подклю чен к четвертому входу сумматора, тр тий вход которого соединен с выходом второго блока деления, второй вход с выходом первого блока деления, пер вый вход - с выходом первого регистра памяти, а выход - с информационны входом второго регистра памяти, при этом установочные входы первого регистра памяти и блока первой разности подключеныко второму выходу блока управления, третий выход которого соединен.с установочным входом блока второй разности, четвертый выход - с установочньм входом блока третьей разности, а пятый выход - с установдчным входо 1 второго регистра памяти.. На чертеже показана блок-схема устройетва; Выход дискретного преобразователя 1 угла соединен с входом блока 2 управления и с первкм входом ключа 3, выход которого соединен со счетчиком 4 импульсов. Генератор 5 эталонной частоты подключен ко второму входу 3. Выход счетчика 4 импульсов соединен с информационными входами .первого регистра 6 памяти и блока 7 первой разности. Выход блока 7 первой разности подключен к информационному входу блока 8 второй разности и к входу первогб блока 9 деления. Выход блока 8 второй разности подключен к информационному входу блока 10 третьей разности и к входу второго блока 11 деления. Выход блока 10 третьей разности соединен с входом третьего блока 12 деления. Выход пер вого регистра 6 памяти и выходы бло ков 9, 11 и 12 деления подключены к соответствующим входам сумматора 13, выход которого соединен с инфор мациЬнным входом второго регистра 14 памяти. Первый блок 9 деления осуществляет деление поступившего на его вход числа на два, второй блок 11 деления делит число на три и в третьем блоке 12 деления производится деление числа на четыре. Таким образом на входы сумматора 13 поступают числа с выходов блока 7, и 10 разности, поделенные соответст венно на два, три, четыре. Первый выход блока 2 управления соединен с установочным входом счет чика 4 импульсов, второй выход - с установочным входом первого регистра 6 памяти, и с установочным входо блока 7 первой разности, третий выход - с установочным входом блока 8 второй разности, четвертый выход с установочным входом блока 10 трет ofi разности, пятый выход - с устано почкыг- входом пятого регистра 14 ПЛМ.тТН .. Устройство работает следующим образом. В исходном состоянии ключ 3 закрыт и на вход счетчика 4 импульсов сигнал от эталонного генератора 5 не поступает. С приходом первого импульсе дискретного преобразователя 1 угла ключ 3 открывается и на вход счетчика 4 импульсов поступает сигнал с эталонного генератора 5. По окончании импульса преобразователя 1 угла ключ 3закрывается и на выходе счетчика 4появляется число 1, пропорциональное среднему значению скорости „, . 2Wfo ЧР1 -ZN;-I где Z - число импульсов, вырабатываемое дискретным преобразователем угла за один оборот; f(f - частота эталонного генератора. По заднему фронту импульса дискретного преобразователя 1 угла в блоке 2 управления формируется серия коротких импульсов/ первый из которых осуществляет запись информации в первый регистр б памяти и в блок 7 первой разности, второй сбрасывает показания счетчика 4 в ноль, третий переводит информацию из блока 7 пер-. вой разности в блок 8 второй разности, четвертый переводит информацию из блока 8 второй разности в блок 10 третьей разности, пятый импульс записывает информацию сумматора 13 во второй регистр 14 памяти. I. После первого измерения счетчик 4 содержит информацию о среднем значении скорости на первом интервале измерения Т,(показания счетчика N). Перепись этой информации осуществляется первым импульсом блока 2 управления по второму выходу в регистр б памяти и в блок 7 первой разности. Затем второй импульс блока 2 управления устанавливает счетчик 4 в нулевое состояние и подготавливает его к новому циклу счета. Третий и четвертый импульсы блока 2 управления не изменяют показания блоков второй 8 и третьей 10 разности, так как,.они не имеют информацию о предыдущих значениях скорости, пятый импульс записывает показания сумматора 13 в регистр 14 памяти. Эти показания равны среднему, значению скорости на первом интервале измерения t которое rtoступает.в сумматор 13 с выхода пе)вого регистра 6 памяти. Информация с остальных блоков устройства в сумматор 13 не поступает. Следующий импульс дискретного преобразователя 1 .угла открывает ключ 3 и на счетчик 4 поступают импульсы с выхода эталонного генератора 5 в течение второго интервала Т,. . По окончании счета на выходе счетчика 4 появляетг-ч число , определяющее среднее значение скорости f -Ft По заднему фронту импульса дискретного преобразователя 1 угла форм руются в блоке 2 управления импульсы, первый из которых записывает по казания счетчика 4 (число N/j) в пер вый регистр 6 памяти и в блок 7 пер вой разности. При этом на выходе бл ка 7 первой разности появляется чис ло, пропорциональное приращению ско рости uN Второй импульс блока 2 управлени устанавливает счетчик 4 в нулевое состояние. Третий импульс переписы ет показания блока 7 первой разности в блок 8 второй разности. Четвер тый импульс не изменяет показания блока 10 третьей разности, так как на.его-информационный вход сигнал не поступает. Первый импульс зйписы вает информацию сумматора 13 в регистр 14 памяти. На выходе регистра 14 памяти формируется число равное сумме . + |-Л N, После третьего измерения (И) в описанной последовательности на вых де первого регистра б памяти появля ется число N, на выходе блока 7 пер вой разности - число N.J- Hj и на выходе блока 8 второй разности появляется число, равное разности приращения скорости между первым и вторым измерением и вторым и третьим измерением ДД N U N -uNj (6) В результате на выходах сумматора 1-3 и соответственно регистра. 14 памяти формируется сумма вида i Hj,N,iuN,, После четвертого измерения импул сами блока 2 управления информация счетчика 4 импульсов в виде числа N записывается в регистр 6 памяти и в блок 7 первой разности, на выхо де которого появляется число, пропр циональное приращению скорости межд четвертым и третьим измерением дМз - N - N4. - (8) Это число записывается в блок 8 второй разности и на его выходе, формируется число, равное разности двух соседних приращений скорости AANQ - . (9) Затем эта разность записывается в блок 10 третьей разности и на его выходе появляется число AAiN ДЛМ -ЛЛМ2 (10) Полученные в блоках разности числа проходят через соответствующие блоки деления и на выходе сумматора формируется сумма вида JN N +iuN +iMNj+lAuuM, (11) которая последним импульсом с блока 2 управления записывается во второй регистр 14 памяти. Эта суммМ опреде-. ляет текущее значение скорости в конце четвертого от начала работы прибора интервала измерения. Все последующие измерения несут информацию о текущем значении скорости в конце каждого интервала измерения. Покажем, что результат измерения скорости в виде суммы (11) включает динамическую погрешность прибора, возникающую при нестационарных режимах работы исследуемого механизма. Обозначим текущее значение скорости, изjУIepeннoe прибором, иУт и запишем выражениедля этой величины с учетом формулы (11) % «cpЛй cpЛ cPQ |дЛДШcp Р1 (). В этой формуле использованы слеО дующие обозначения . ш -д, --М, 2N4 .МЗ сРа- zHa -i %o « c A- tPft W r|%Pa. л%Рй сРГ сРа- uttJcp-i .;лШср1, JMiMji/c suuuj p -uuuUc p.. Таким образом,на выходе предл гаемого устройства текущее значение скорости формируется с учетом бледующих поп11авок: лоЦ;р |(11Ьр4-1« оРз) характеризует приращение среднего значения скорости между последним и предыдущим измерением;- лдtWcp-a- 4( а) характеризует изменение двух соседних приращений, рывок скорости /характеризует приращение двух соседних рьшков скорости. В большинстве производственных механизмов , имеющих значительные инерционности и мал.ом времени изме-.рения Т, можно достаточно точно апроксимировать кривую (t) на участке измерения лараболой вида g(( -(13) где So-t начальное значение ускорения на первом участке измерения. Текущее (мгновенное) значение скорости механизма в конце последнего интервала измерения определяется формулой f т ),jt-jai сид+ оД г.у + « I ITfW Среднее значение скорости на пос леднем интервале измерения Т. Лг Ь. J t4() ,ttA,j) (15) Сравнивая формулы (14) и (15.) при ходим к выводу, что динамическая пог решность измерения скорости, если в приборе не вводятся поправки, может быть значительной и определяется выражениемЛ9-%-Шср |е гф т 41х,т (-,6) Первая составляквдая ошибки (16) о ределяется постоянным значением уско рения на интервале измерения, вторая составляющая определяется рывком ско рости , третья «гоставляющаЯ определяется интенсивностью изменения рывка Покажем, что определение приращения скорости по двум соседним измерениям позволяет ввести поправку вида -jf,T |й сРз5()4(ч4 He Wtdt- 00.. ((t)3t4lk(t). OQ . .0 ОО WM.A/jat ihi, 00I-о00 )tS -f||eoi i «J«t itecjiHv ,- (i«c;Vr /;i«04T4 - ieo4T-4a,T« (п) При выводе формулы были использованы следующие соотношения , . .. покажем, что разность двух соседних приращений, позволяет ввести поправкуtuu,.p2(,)}(e T-tx/-g T. . ,т) ;.1.( 5V .. . (в При выводе последнего выражения использовано следующее соотношение ... . ли)сра 6 0«т-5-Ч Результирующая поправка по резул татам измерения блока первой и второй разности с учетом выражений (17 и (18), равна i о 5 o4 4V Такрм образом предложенная в устройстве поправка, вводимая блоком первой и второй разности, позволяет полностью компенсировать динамическую погрешность применительно к рассмотренному закону движения €(i)-v + Лд , Можно показать, что если закон движения имеет бЪлее сложную форму и аппроксимируется кривой более высокого порядка,требуется вводить поправку в виде результата, получаемого блоком третьей разности. Формула изобретения Устройство для измерения скорости, содержащее дискретный преобразователь угла, выход которого соединен с блоком управления и со входом ключа, второй вход которого подключен к генератору эталонной частоты, а выход - к.счетчику импульсов, установочный вход которого соединен с первым выходом блока управления, о т л и. ч а ю щ е е с я тем, что,, с целью увеличения точности измерения, в .устройство введены три блока разности, три блока деления, два регистра памяти и сумматор, причем выход счётчика импульсов подключен к информационным входам первого регистра памяти и блока первой разности; выход которого соединен со входом первого блока деления и с информационным входом блока второй разности, выход которого подключен ко входу второго блока деления и к информационному входу блока третьей разности, выход которого соединен со входом третьего блока деления, выход которого подключен к 1етвертому входу сумматора, третий вход которого соединен с выходом второго блока деления, второй вход - с выходом первого блока деления, первый вход - с выходом первого регистра памяти, а выход - с информационным входом второго регистра памяти, при этом установочные вхоЛы первого регистра памяти и блока первой ро энбсти подключены ко второму выходу блока управления, третий выход которого соединен с установочным входом блока второй разности, четвертый выход - с установочным входом блока третьей разности, а пятый выход - с установочным входом второго регистра памяти. Источники информации, принятые во внимание при экспертизе 1. Авторское свидетельство СССР по ааявке 2583091/10, кл. 6 01 Р 3/48, 1978. 2.-Авторское свидетельство СССР 249798, кл. G 01 Р 3/64, 1967 (прототип) ,
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для измерения скорости | 1979 |
|
SU847203A1 |
| Устройство для вычисления функции линеаризации | 1980 |
|
SU905831A1 |
| Устройство для коррекции характеристик измерительных преобразователей | 1982 |
|
SU1100630A1 |
| Система управления вибростендом | 1984 |
|
SU1275396A1 |
| Устройство для цифровой обработки сигналов | 1986 |
|
SU1397937A1 |
| Устройство для обработки и передачи информации учета товарной нефти | 1983 |
|
SU1129625A1 |
| Устройство для поворота вектора | 1982 |
|
SU1076910A1 |
| Система контроля параметров | 1984 |
|
SU1190364A1 |
| Устройство для вычисления коэффициентов Фурье | 1985 |
|
SU1283790A1 |
| Устройство для отображения графической информации на экране электронно-лучевой трубки | 1980 |
|
SU941987A1 |