1
Изобретение относится к автомати-, к.е и вычислительной технике и может быть использовано при. создании систем автоматического управления движущимися объектами.
Известны устройства, в которых при движении в одном направлении, т.е. при одной последовательности . смены комбинаций,, сигналы пoявJ яютcя на одной диодной сборке, а при движении в другом направлении - на другой диодной сборке. При этом триггер - реверсор устанавливается в одно из двух состояний Г.
Однако данные устройства, построенные на импульсных элементах, сложны, характеризуются невысоким быстродействием и низкой надежностью.
Устройства с применением потенциальных элементов имеют более высокое быстродействие, но сложны, так как количество запоминающих элементов (триггеров) в них не менее числа возможных рабочий состояний системы, т.е. не менее б.
Известно также устройство для определения направления движения, содержащее три датчика положения, ва элемента И, элементы ИЛИ и пять триггеров Г23 .
Однако это устройство сложно по исполнению и не обладает достаточной надежностью из-за нашичия большого количества элементов.
Цель изобретения - повышение надежности устро йства.
Поставленная цель достигается тем, что устройство для определения направ10ления движения, содержащее три датчика положения, первый - пятый триггеры, первый и второй элементы И, элемент ИЛИ, снабжено элементом НЕ, причем первый, второй и третий триггеры
15 объединены в первый регистр, а четвертый и пятый триггеры - во второй регистр шина Квант подключена к тактовым входам регис гров и к первым входам элементов И, выход первого
20 датчика соединен со входом первого регистра выход второго датчика со входом второго регистра, .прямые вйходы триггеров последних разрядов первогои второго регистров подключе25на ко вторым, а инверсные к третьим входам первого и второго элементов И, выход третьего датчика соединен с четвертым входом первого элемента И, а через элемент НЕ четвертым входом второго элемента И,
30
а выходы элементов И подключены ко входам элементов ИЛИ,
На чертеже представлена схема устройства для определения направления движения.
Устройство содержит триггеры 1-5, элемент 6 НЕ, элементы 7 и 8 И, элемент 9 ИЛИ, триггеры 1-3 объединены в регистр 10, а триггеры 4 и 5 - в регистр 11. I
Работа устройства основана на следующем принципе распознавания смены комбинаций с 1гналов датчиков.
Известно, чтопри движении объекта в одном направлении {условно вперед) от исходного пункта, фиксируемого, например, кодовой комбинацией 101, будет следукйцая система комбинаций сигналовt 101, 001, Oil, Old, 110, 100, 101., а при движении в другом направлении (условно назад) от того же исходного пункта, смена комбинаций будет: 101, 100, 110, 010 011, 001,101.
Расположим комбинации вертикально
&„,( а 1ч 1. i. О О вперед .ХЧ.ХиЧ. 1 ДЗ 1
Д Д2
назад ДЗ 1
При исследовании комбинаций вдоль наклоненных линий на каждом такте выявляется следуюй1ая закономерность. При движений вперед возможны две комбинации - 101 и 010, при движении назад появляются комбинации: 000, 100, 110, 111, 011, 001,000 и т.д., при этом комбинации 010 и 101 отсутствуют.
Работа устройства осно-вана на распознавании комбинаций по наклонным линиям и сравнений их с комбиНацией 101 или 010, В случае совпаде .НИН объект движется в одном, а несовпадения - в другом направлении.
При сравнении на каждом третьем от начала такте, очевидно, необходимо знать информацию- от датчика ДЗ на текущем, от датчика Д2 на предыдущем такте и от датчика Д1 за два такта дй cp.aBtieHKH,
Объединение триггеров 1-3 в трехразрядный регистр , а тригге-ров 4-5. в двухразрядный.регистр сдвига позволяет перемейать информацию, записываемую & регистры на ЬДин разряд йправо по переднему фронту каждого тактового импульса.
таким сэбразом, сравнение на третьем такте осуществляется только один
раз - при включении питания. Затем сравнение осуществляется на каждом последующем такте, в том числе и при остановке объекта.
Устройство работает следующим-образом.V
По переднему фронту импульса Квант информация от датчиков Д1 и Д2 передается из первых разрядов регистров 10 и И в следующие. При этом происходит сборка комбинаций 101 и 010 элементами 7 и 8 И. В случае совпадения на выходе одного из элементов 7 или 8 И появляется сиг- нал, который проходит через элемент 9 ИЛИ и свидетельствует о движении объекта вперед.
Данное устройство при простом схемном решении дает возможность надежно на каждом такте осуществлять направление движения объекта, что приводит к снижению отказов системы автоматического управления движущимися объектами.
Формула изобретения
Устройство для определения направления движения, содержащее три датчика положения, пять триггеров, два Q элемента И и элемент ИЛИ, отличающееся тем, что, с целью повышения надежности устройства,оно снабжено элементом НЕ, причем первый, второй и третий триггеры объединены
в первый регистр, а четвертый и
пятый триггеры - во второй регистр, тактовые входы регистров объединены шиной Квант, подключенной к первым входам элементов И, выход первого датчика соединен со входом первого
0 регистра, выход второго датчика г со входом второго регистра, npHNOje выходы триггеров последних разрядов первого и второго регистров подключены ко вторым, а инверсные выходы, 5 к третьим входам первого и второго элементов И, выход третьего датчика соединен с четвертым входом первого элемента И, а через элемент НЕ - с четвертым входом второго элемента И,
Q а выходы элементов И подключены ко входам элемента ИЛИ.
Источники информации, принятые во внимание при экспертизе
1.Киричок Ю. Г, и др. Привод шахтных подъемных установок большой мощности. Недра, 1972, с.244.
2.Авторское свидетельство СССВ по заявке .№ 2456783/18-10, 1977 (прототип),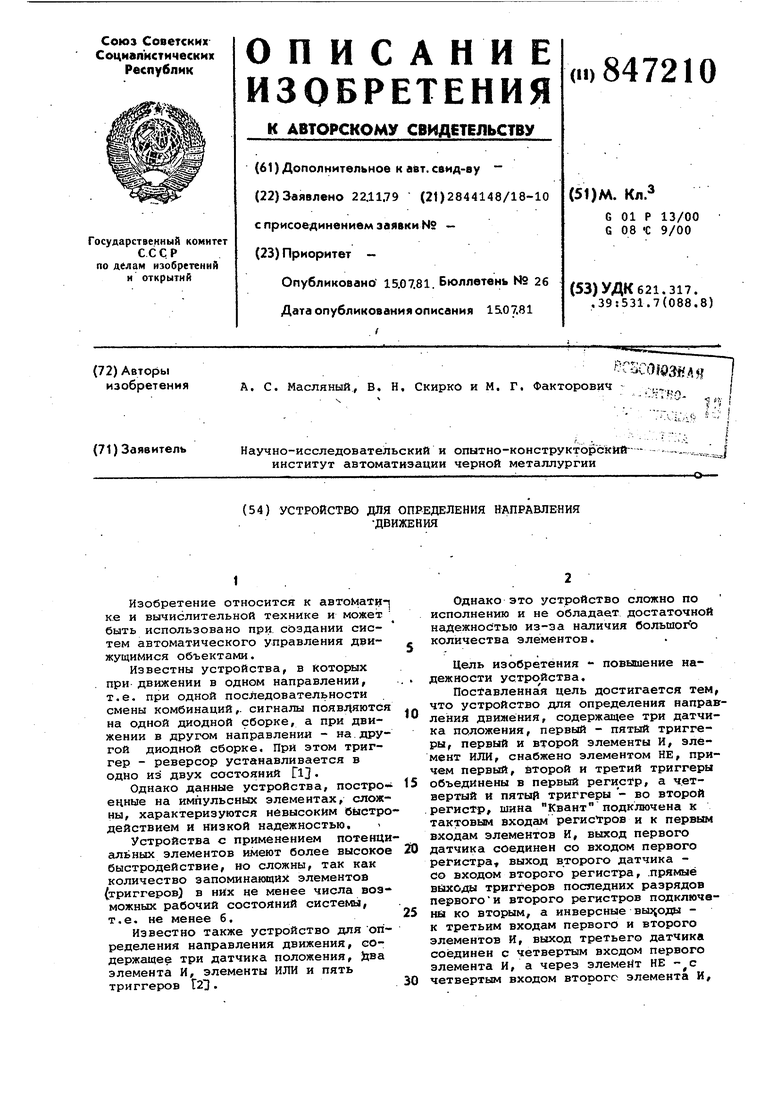
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для коррекции программ | 1989 |
|
SU1647574A1 |
| Преобразователь угол-код | 1987 |
|
SU1619398A1 |
| Двухрежимный распределитель импульсов для управления трехфазным шаговым двигателем | 1981 |
|
SU1019571A1 |
| Трехканальный двухрежимный распределитель импульсов для управления шаговым двигателем | 1980 |
|
SU907753A1 |
| Устройство для контроля дефектов фотошаблона | 1989 |
|
SU1698712A1 |
| СУММИРУЮЩЕЕ УСТРОЙСТВО ПО МОДУЛЮ | 1993 |
|
RU2034328C1 |
| Устройство для умножения комплексных чисел | 1986 |
|
SU1388851A1 |
| Трехканальный реверсивный распределитель уровней | 1983 |
|
SU1142891A1 |
| Трехканальный трехрежимный распределитель импульсов для управления шаговым двигателем | 1984 |
|
SU1275734A1 |
| Генератор последовательности Якоби | 1983 |
|
SU1118989A1 |