(54) УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ШАГОВЫМ ДВИГАТЕЛЕМ
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ ультразвукового измерения толщины движущейся ленточной заготовки и устройство для его осуществления | 1988 |
|
SU1520332A1 |
| Устройство для управления разгоном и торможением двигателя | 1983 |
|
SU1174904A1 |
| Устройство для управления шаговым двигателем | 1986 |
|
SU1334350A1 |
| РАСПРЕДЕЛИТЕЛЬ ИМПУЛЬСОВ ДЛЯ УПРАВЛЕНИЯ ЧЕТЫРЕХФАЗНЫМ ШАГОВЫМ ДВИГАТЕЛЕМ | 1998 |
|
RU2133550C1 |
| Устройство для управления шаговым электроприводом | 1988 |
|
SU1682974A1 |
| Электропривод переменного тока | 1985 |
|
SU1292155A1 |
| Устройство для управления шаговым двигателем | 1983 |
|
SU1108600A1 |
| Устройство для проверки максимальной токовой защиты в отключенном состоянии | 1974 |
|
SU792404A1 |
| Устройство для управления фотоколориметрическим газоанализатором | 1982 |
|
SU1092468A1 |
| Устройство для позиционного управления шаговым двигателем | 1989 |
|
SU1658365A1 |
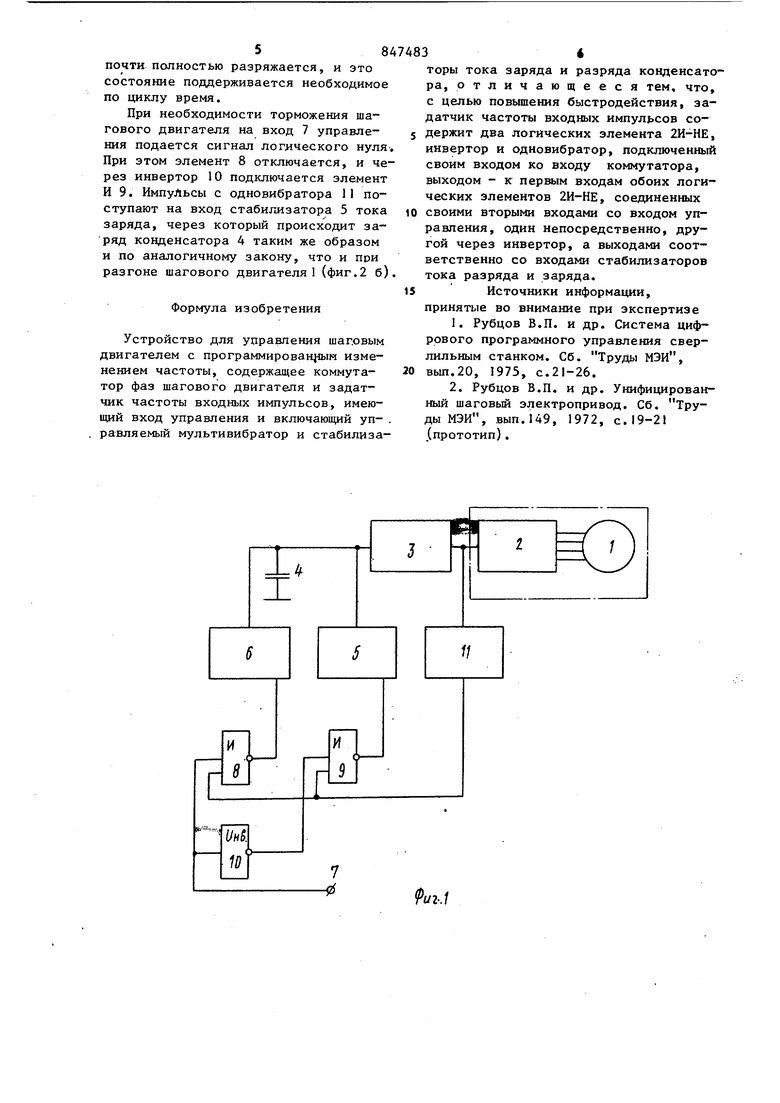
Изобретение относится к электротехнике и может найти широкое применение в электромеханических устрой- етвах технологического оборудования, содержащего шаговые двигатели, в которых требуется для повьшения средних скоростей перемещения объектов осуществлять минимальный по времени разгон двигателя до частоты, превышающей частоту приемистости данного тида двигателя с последующим сиижеш ем частоты при торможении. Известно устройство для управлени шаговым двигателем с программированным изменением частоты при разгоне и торможении, содержащее коммутатор фаз шагового двигателя и задатчик частоты входных импульсов 01. Наиболее близким к предлагаемому по технической сущности является уст ройство для управления шаговым двига телем с программированным изменением частоты, содержащее коммутатор фаз шагового двигателя и задатчик частоТЫ входных импульсов, имекхций вход управления и включающий управляемый мультивибратор и стабилизаторы тока заряда и разряда конденсатора Iz . Недостатком известных устройств является низкое быстродействие, что обусловлено изменением частоты входных импульсов шагового двигателя по линейному закону, который не является оптимальным. Цель изобретения - повьшгение быстродействия шагового привода. Поставленная цель достигается тем, что задатчик частоты входных импульсов содержит два логических элемента 2И-НЕ, инвертор и одновибратор, подключенный своим входом ко входу коммутатора, выходом - чс первым входам обоих логических элементов 2И-НЕ, соединенных своими вторыми входами со входами управления непосредственно , другой через инвертор, а выходами соответственно со входами стабилизаторов тока разряда и заряда. 38 Такое выполнение устройства обеспечивает формирование оптимальных законов изменения частоты входных импульсов как при разгоне, так и при торможении шагового двигателя. На фиг,1 приведена функциональная схема устройства; на фиг,2 - характеристики элементов, входящих в задат чик входных импульсов. Устройство (фиг,1) содержит шаговый электродвигатель 1, коммутатор 2 фаз шагового двигателя, управляемый мультивибратор 3, конденсатор 4, стабилизатор 5 тока заряда, стабилизатор 6 тока разряда, вход 7 управления логические элементы 2И-НЕ 8 и 9, инвертор 10 и одновибратор 11, Устройство работает следующим образом, При подаче на вход 7 .управления логической единицы включается элемент 2И-НЕ и импульсы с одновибратора 11 поступают на вход стабилизатора 6 тока разряда. Стабилизаторы тока заряда и разряда выполняются по из вестным схемам на транзисторах таким образом, чтобы их включенное состояние соответствовало наличию на входе логического нуля. Скорость заряда, и разряда конденсаторов 4 определяется частотой управляемого мультивибра- . тора 3,
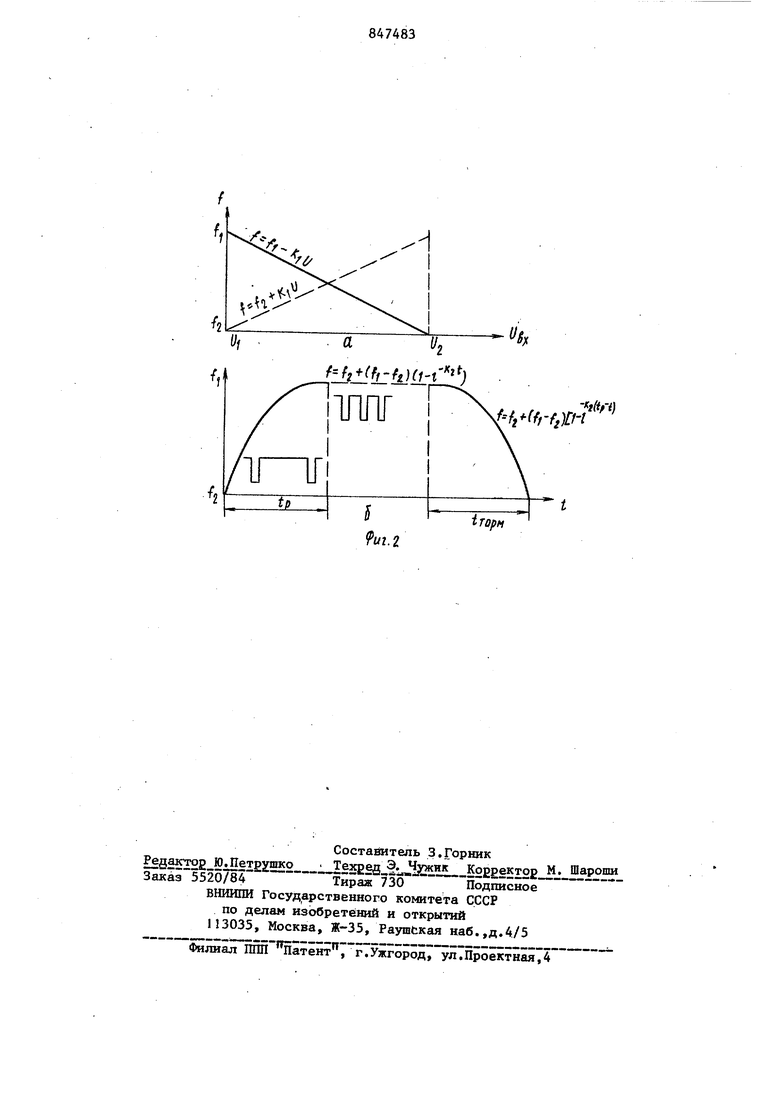
При линейно-спадающей передаточной характеристике управляемого мультивибратора 3 (сплошная линия на фиг.2а
« ,-,N. (1)
Формирование требуемого закона изменения частоты происходит следующим образом.
При подаче на вход 7 управления логической единицы включается элемент 8, и отрицательные импульсы с одновибратора 11, проинвертированные элементом 2И-НЕ 8, поступают на вход стабилизатора 6 тока разряда , При этом напряжение на конденсаторе 4 за Промежуток времени dt изменяется по закону
3-1- --iU
-fdt K3dt-K4fdt,(a)
c5iU
где Л постоянный ток разряда конденса тора;
где ./К, - константа.
Подставляя (З) в (4) получаем
$xVK,(),,,e.t
,(7;
к--к Vi где
константы.
N-( J
При линейно-возрастающей передаточной характеристике управляемого мультивибратора, (пунктирная линия на фиг,2а)
Формируется аналогичный закон изменения частоты при перемене местами стабилизаторов 5 и 6 тока,
Таким образом, при соответствующем подборе констант формируется экспоненциальный закон изменения (увеличения) выходной частоты управляемого мультивибратора 3, и осуществляется программируемый разгон шагового двигателя (фиг, 2 б),При длительном воздействии сигнала управления на разгон на входе 7 конденсатора r - длительность одновибратора; С - емкость конденсатора 4; - константы. гПосле подстановки уравнения (1)в получаем 0 K3cH:-K4()c t K t4-k: Uc3rt, (3) K5 K3-K4f-t; (,0,-1; K,j.,K - константы. Закон изменения частоты напряжения конденсаторе 4 при разгоне ) () f - начальная частота, с которой начинается разгон; f, - максимальная частота, при которой заканчивается разгон; К„ - константа,, определяемая типом электропривода. Решение (З) имеет вид tc - KbU e 7 K5-KgU Kge 6 (FJ К 7 - постоянная интегрирования; - константа. тсюда .K,.,,, („
почти полностью разряжается, и это состояние поддерживается необходимое по циклу время.
При необходимости торможения шагового двигателя на вход 7 управления подается сигнал логического нуля При этом элемент 8 отключается, и через инвертор 10 подключается элемент И 9. ИмпуЛьсы с одновибратора II поступают на вход стабилизатора 5 тока заряда, через который происходит заряд конденсатора 4 таким же образом и по аналогичному закону, что и при разгоне шагового двигателя (фиг.2 б)
Формула изобретения
Устройство для управления шаговым двигателем с программирован|1ым изменением частоты, содержащее коммутатор фаз шагового двигателя и задатчик частоты входных импульсов, имеющий вход управления и включающий управляемый мультивибратор и стабилизаторы тока заряда и разряда конденсатора, отличающееся тем, что, с цепью повышения быстродействия, задатчик частоты входных импульсов содержит два логических элемента 2И-НЕ, инвертор и одновибратор, подключенный своим входом ко входу коммутатора, выходом - к первым входам обоих логических элементов 2И-НЕ, соединенных
своими вторыми входами со входом управления, один непосредственно, другой через инвертор, а выходами соответственно со входами стабилизаторов тока разряда и заряда.
Источники информации,
принятые во внимание при экспертизе
вьш.20, 1975, с.21-26.
Wf
fili: fjrfi)fLi)
lUW
11
iL
(s,
Ht(frfiii:f-t
9иг.г
