Изобретение относится к системам программного управления и предназначено для плавного разгона, торможения и точного останова прецизионного шагового электропривода.
Цель изобретения - расширение области применения за счет упрощения устройства для управления шаговым электроприводом с автономной отработкой момента начала торможения при нелинейном законе разгона и торможения.
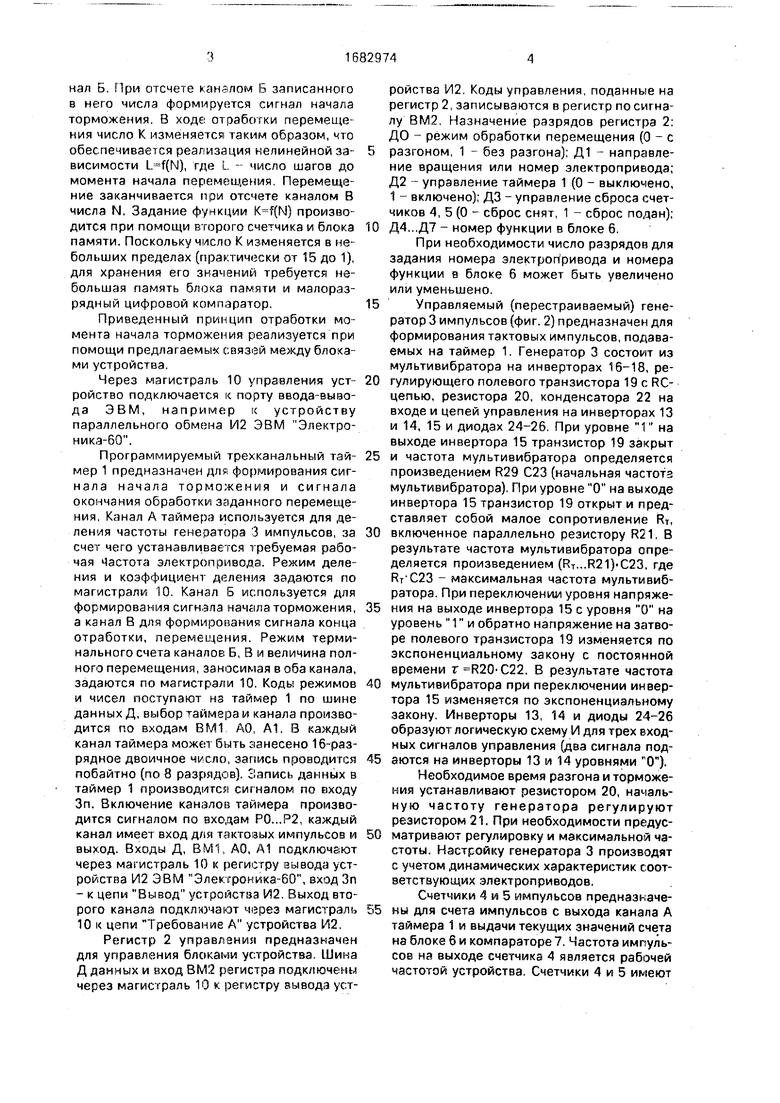
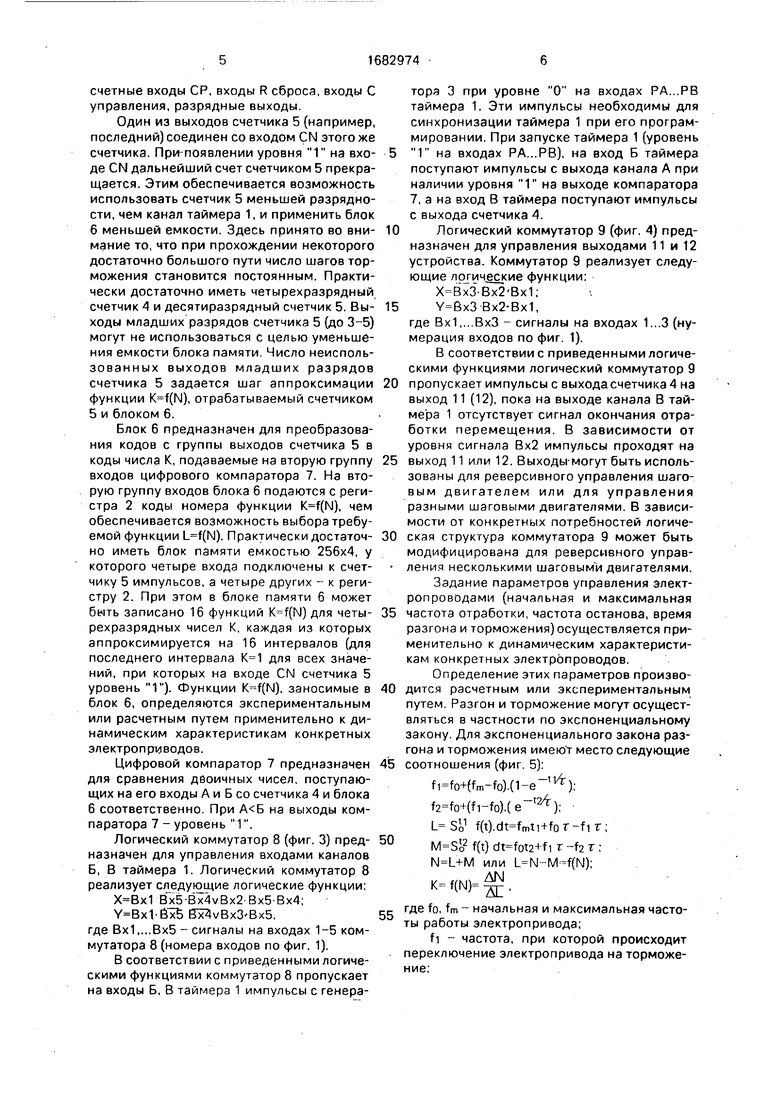
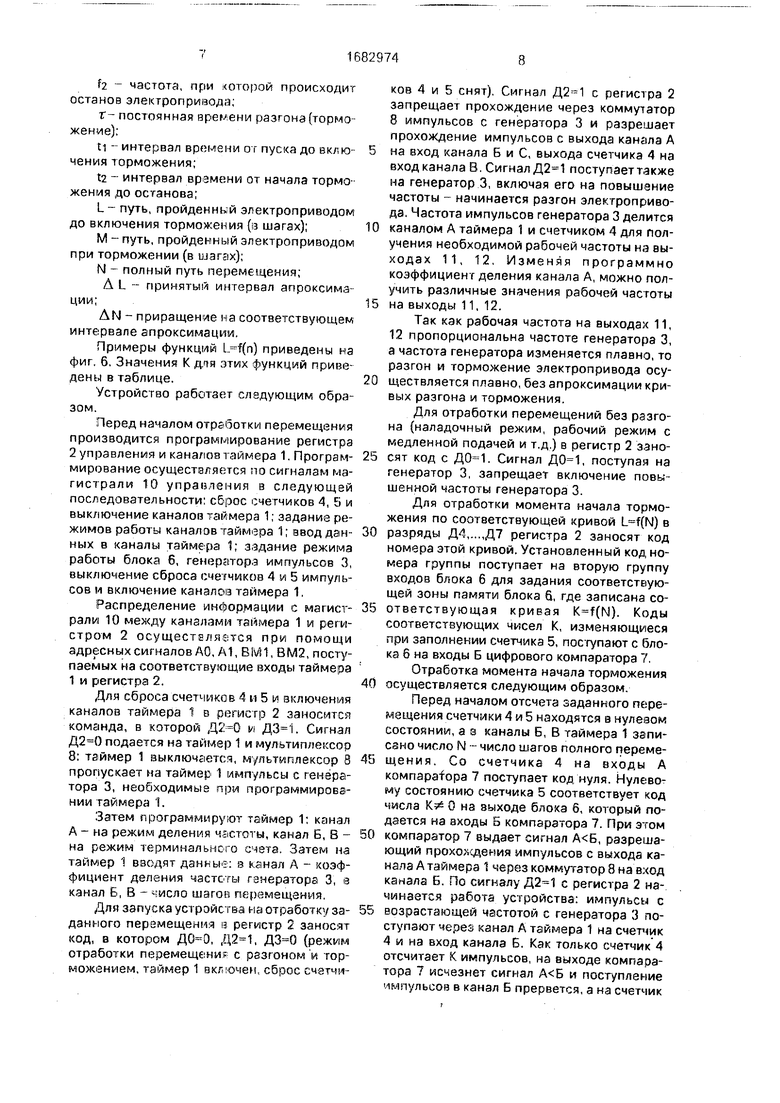
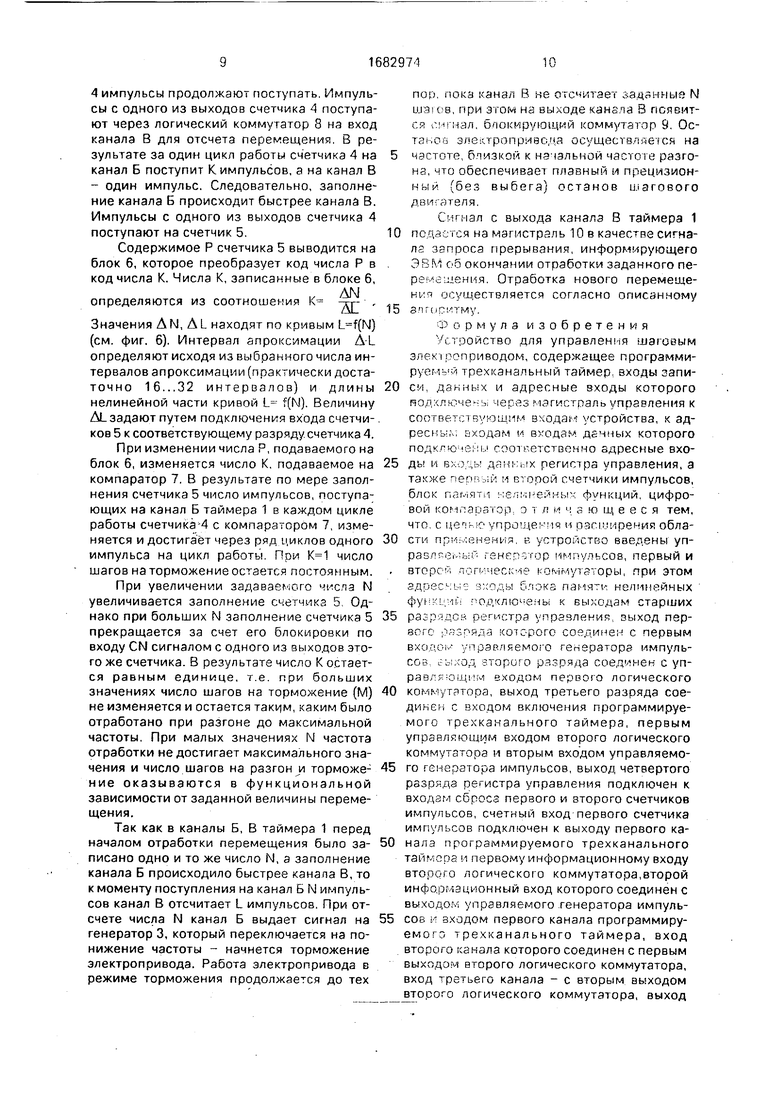
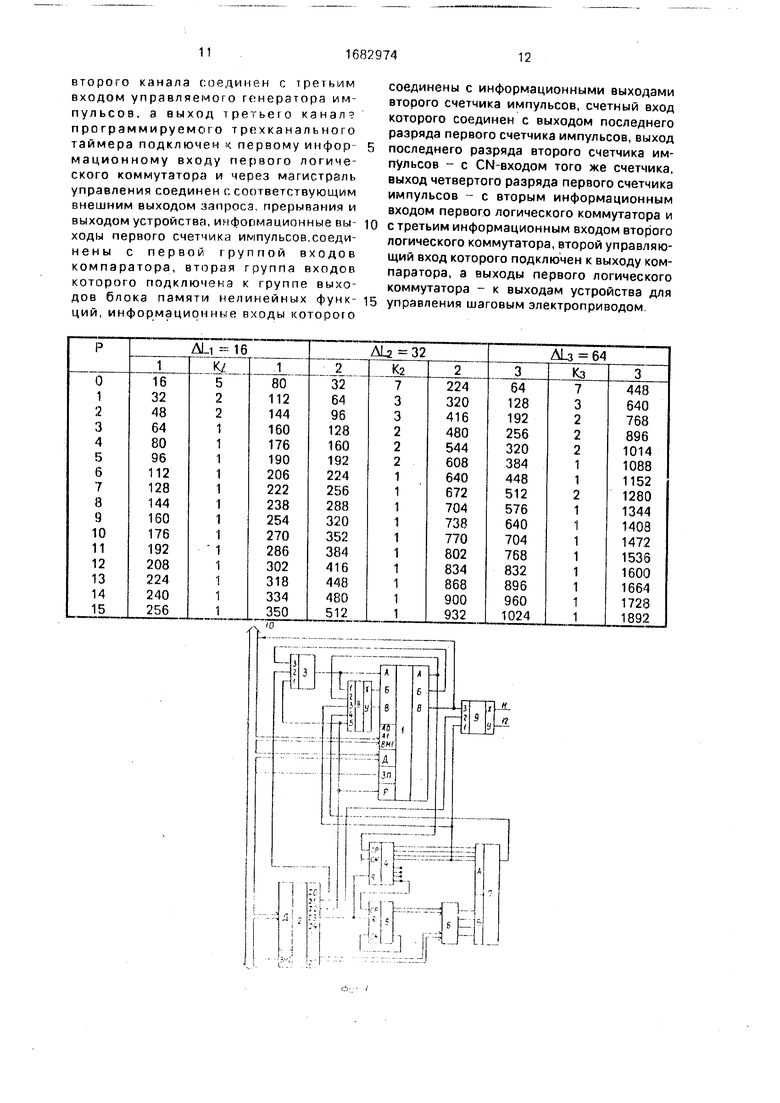
На фиг. 1 приведена блок-схема устройства для управления шаговым электроприводом; на фиг. 2 - пример выполнения перестраиваемого генератора импульсов; на фиг. 3 и 4 - примеры выполнения первого и второго логических коммутаторов; на фиг. 5 - графики изменения частоты отработки перемещения при экспоненциальном разгоне и торможении; на фиг. 6 - графики функций (N).
Устройство содержит программируемый трехканальный таймер 1, регистр 2 управления, перестраиваемый генератор 3 импульсов, первый счетчик 4, второй счетчик 5, блок 6 памяти нелинейных функций (ППЗУ), цифровой компаратор 7, второй логический коммутатор 8, первый логический коммутатор 9, магистраль 10 управления. Выходы коммутатора 9 являются выходами 11 и 12 устройства. Генератор 3 импульсов (Фиг. 2) содержит инверторы 13-18, регулирующий транзистор 19. резисторы 20 и 21, конденсаторы 22 и 23, диоды 24-26.
Сущность изобретения заключается в том, что отработка момента начала торможений производится в соответствии с нелинейной зависимостью пути разгона от заданного пути полного перемещения. Для этого в каналы Б, В таймера, запрограммированные на режим терминального счета, перед началом отработки перемещения записывают число шагов полного перемещения. В ходе отработки перемещения каждый импульс, поступающий на канал В таймера, сопровождается подачей К импульсов на каё
О 00
ю ч
VI
Ьь
нал Б. При отсчете каналом Б записанного в него числа формируется сигнал начала торможения. В ходе отработки перемещения число К изменяется таким образом, что обеспечивается реализация нелинейной зависимости L-f(N), где L - число шагов до момента начала перемещения. Перемещение заканчивается при отсчете каналом В числа N. Задание функции (N) производится при помощи второго счетчика и блока памяти. Поскольку число К изменяется в небольших пределах (практически от 15 до 1), для хранения его значений требуется небольшая память блока памяти и малоразрядный цифровой компаратор.
Приведенный принцип отработки момента начала торможения реализуется при помощи предлагаемы связей между блоками устройства.
Через магистраль 10 управления устройство подключается к порту ввода-вывода ЭВМ, например к устройству параллельного обмена И2 ЭВМ Электро- ника-60,
Программируемый трехканальный таймер 1 предназначен для формирования сиг- нала начала торможения и сигнала окончания обработки заданного перемещения. Канал А таймера используется для деления частоты генератора 3 импульсов, за счет чего устанавливается требуемая рабочая частота электропривода. Режим деления и коэффициент деления задаются по магистрали 10. Канал Б используется для формирования сигнала начала торможения, а канал В для формирования сигнала конца отработки, перемещения. Режим терминального счета каналов Б, В и величина полного перемещения, заносимая в оба канала, задаются по магистрали 10. Коды режимов и чисел поступают на таймер 1 по шине данных Д, выбор таймера и канала производится по входам ВМ1, АО, А1. В каждый канал таймера может быть занесено 16-разрядное двоичное число, запись проводится побайтно (по 8 разрядов). Запись данных в таймер 1 производится сигналом по входу Зп. Включение каналов таймера производится сигналом по входам РО...Р2, каждый канал имеет вход для тактовых импульсов и выход. Входы Д, ВМ1, АО, А1 подключают через магистраль 10 к регистру вывода устройства И2 ЭВМ Электроника-60, вход Зп - к цепи Вывод устройства И2. Выход второго канала подключают через магистраль 10 к цепи Требование А устройства И2.
Регистр 2 управления предназначен для управления блоками устройства. Шина Д данных и вход ВМ2 регистра подключены через магистраль 10 к регистру вывода устройства И2. Коды управления поданные на регистр 2. записываются в регистр по сигналу ВМ2. Назначение разрядов регистра 2: ДО - режим обработки перемещения (0 - с
разгоном, 1 - без разгона): Д1 - направление вращения или номер электропривода; Д2 управление таймера 1 (0 - выключено, 1 - включено); ДЗ - управление сброса счетчиков 4, 5 (0 - сброс снят, 1 - сброс подан),
0 Д4...Д7 - номер функции в блоке 6.
При необходимости число разрядов для задания номера электропривода и номера функции в блоке 6 может быть увеличено или уменьшено.
5 Управляемый (перестраиваемый) генератор 3 импульсов (фиг. 2) предназначен для формирования тактовых импульсов, подаваемых на таймер 1. Генератор 3 состоит из мультивибратора на инверторах 16-18, ре0 гулирующего полевого транзистора 19 с RC- цепью, резистора 20, конденсатора 22 на входе и цепей управления на инверторах 13 и 14, 15 и диодах 24-26. При уровне 1 на выходе инвертора 15 транзистор 19 закрыт
5 и частота мультивибратора определяется произведением R29 С23(начальная частота мультивибратора). При уровне О на выходе инвертора 15 транзистор 19 открыт и представляет собой малое сопротивление RT,
0 включенное параллельно резистору R21. В результате частота мультивибратора определяется произведением (RT...R21)-C23, где RT C23 - максимальная частота мультивибратора. При переключении уровня напряже5 ния на выходе инвертора 15 с уровня О на уровень 1 и обратно напряжение на затворе полевого транзистора 19 изменяется по экспоненциальному закону с постоянной времени r R20 C22. В результате частота
0 мультивибратора при переключении инвертора 15 изменяется по экспоненциальному закону. Инверторы 13, 14 и диоды 24-26 образуют логическую схему И для трех входных сигналов управления (два сигнала под5 аются на инверторы 13 и 14 уровнями О). Необходимое время разгона и торможения устанавливают резистором 20, начальную частоту генератора регулируют резистором 21. При необходимости предус0 матривают регулировку и максимальной частоты. Настройку генератора 3 производят с учетом динамических характеристик соответствующих электроприводов.
Счетчики 4 и 5 импульсов предназначе5 ны для счета импульсов с выхода канала А таймера 1 и выдачи текущих значений счета на блоке 6 и компараторе 7. Частота импульсов на выходе счетчика 4 является рабочей частотой устройства. Счетчики 4 и 5 имеют
счетные входы СР, входы R сброса, входы С управления,разрядные выходы
Один из выходов счетчика 5 (например, последний) соединен со входом CN этого же счетчика При появлении уровня 1 на входе CN дальнейший счет счетчиком 5 прекращается. Этим обеспечивается возможность использовать счетчик 5 меньшей разрядности, чем канал таймера 1, и применить блок 6 меньшей емкости Здесь принято во внимание то, что при прохождении некоторого достаточно большого пути число шагов торможения становится постоянным Практически достаточно иметь четырехразрядный счетчик 4 и десятиразрядный счетчик 5 Выходы младших разрядов счетчика 5 (до 3 5) могут не использоваться с целью уменьшения емкости блока памяти Число неиспользованных выходов младших разрядов счетчика 5 задается шаг аппроксимации функции (N), отрабатываемый счетчиком
5и блоком 6
Блок 6 предназначен для преобразования кодов с группы выходов счетчика 5 в коды числа К, подаваемые на вторую группу входов цифрового компаратора 7 На вторую группу входов блока б подаются с регистра 2 коды номера функции (N), чем обеспечивается возможность выбора требу емой функции (N) Практически достаточно иметь блок памяти емкостью 256x4 у которого четыре входа подключены к счет чику 5 импульсов, а четыре других к реги стру 2 При этом в блоке памяти 6 может бмть записано 16 функций К f(N) для четы рехразрядных чисел К каждая из которых аппроксимируется на 16 интервалов (для последнего интервала К 1 для всех значе ний, при которых на входе CN счетчика 5 уровень 1) Функции (N) заносимые в блок 6, определяются экспериментальным или расчетным путем применительно к динамическим характеристикам конкретных электроприводов
Цифровой компаратор 7 предназначен для сравнения двоичных чисел поступающих на его входы А и Б со счетчика 4 и блока
6соответственно При на выходы компаратора 7 - уровень 1
Логический коммутатор 8 (фиг 3) предназначен для управления входами каналов Б, В таймера 1 Логический коммутатор 8 реализует следующие логические функции
Вх5 Bx4vBx2 Bx5 Вх4
Sx5 B x4vBx3 B/5 где Вх1....Вх5 - сигналы на входах 1-5 коммутатора 8 (номера входов по фиг 1)
В соответствии с приведенными логическими функциями коммутатор 8 пропускает на входы Б, В таймера 1 импульсы с генера
тора 3 при уровне О на входах РА РВ таймера 1. Эти импульсы необходимы для синхронизации таймера 1 при его программировании. При запуске таймера 1 (уровень 5 1 на входах РА РВ), на вход Б таймера поступают импульсы с выхода канала А при наличии уровня 1 на выходе компаратора 7, а на вход В таймера поступают импульсы с выхода счетчика 4
0Логический коммутатор 9 (фиг 4) предназначен для управления выходами 11 и 12 устройства Коммутатор 9 реализует следующие логические функции Вх2 Вх1,
Bx2-Bx1,
где Вх1 ВхЗ - сигналы на входах 1 3 (нумерация входов по фиг 1)
В соответствии с приведенными логическими функциями логический коммутатор 9
0 пропускает импульсы с выхода счетчика 4 на выход 11 (12), пока на выходе канала В таймера 1 отсутствует сигнал окончания отработки перемещения В зависимости от уровня сигнала Вх2 импульсы проходят на
5 выход 11 или 12 Выходы могут быть использованы для реверсивного управления шаговым двигателем или для управления разными шаговыми двигателями В зависимости от конкретных потребностей логиче0 екая структура коммутаюра 9 может быть модифицирована для реверсивного управления несколькими шаговыми двигателями. Задание параметров управления электропроводами (начальная и максимальная
5 частота отработки частота останова, время разгона и торможения) осуществляется применительно к динамическим характеристикам конкретных электропроводов
Определение этих параметров произво0 дится расчетным или экспериментальным путем Разгон и торможение могут осуществляться в частности по экспоненциальному закону Для экспоненциального закона разгона и торможения имеют место следующие
5 соотношения (фиг 5)
(fm-fo)(1 )
f2 foKfi-fo)()
L- So1 f(t)dt fmtHfoT-fir,
f(t) dt-fot2 fir f2 r
или L--N M f(N)
„ ,,... AN K- f(N)- ,
где fo, fm - начальная и максимальная частоты работы электропривода,
fi - частота, при которой происходит переключение электропривода на торможение
5
f2 - частота, при которой происходит останов электропривода;
г- постоянная времени разгона (торможение):
ti - интервал времени от пуска до включения торможения;
т,2 - интервал времени от начала торможения до останова;
L - путь, пройденный электроприводом до включения торможения (в шагах);
М - путь, пройденный электроприводом при торможении (в шагах);
N - полный путь перемещения; Д L - принятый интервал апроксима- ции;
ДМ - приращение на соответствующем интервале апроксимации.
Примеры функций (n) приведены на фиг. 6, Значения К для этих функций приведены в таблице.
Устройство работает следующим образом.
Перед началом отработки перемещения производится программирование регистра 2 управления и каналов таймера 1. Программирование осуществляется по сигналам магистрали 10 управления в следующей последовательности: сброс счетчиков 4, 5 и выключение каналов таймера 1; задание режимов работы каналов таймера 1; ввод данных в каналы таймера 1; задание режима работы блока 6, генератора импульсов 3, выключение сброса счетчиков 4 и 5 импульсов и включение каналов таймера 1.
Распределение информации с магистрали 10 между каналами таймера 1 и регистром 2 осуществляется при помощи адресных сигналов АО, А1, ВМ1, ВМ2, посту- паемых на соответствующие входы таймера 1 и регистра 2.
Для сброса счетчиков 4 и 5 и включения каналов таймера 1 в регистр 2 заносится команда, в которой и , Сигнал подается на таймер 1 и мультиплексор 8: таймер 1 выключается, мультиплексор 8 пропускает на таймер 1 импульсы с генератора 3, необходимые при программировании таймера 1,
Затем программируют таймер 1: канал А - на режим деления частоты, канал Б, В - на режим терминального счета. Затем на таймер 1 вводят данные: в канал А - коэффициент деления частоты генератора 3, в канал Б, В - число шагов перемещения.
Для запуска устройства на отработку заданного перемещения в регистр 2 заносят код, в котором , , (режим отработки перемещения с разгоном и торможением, таймер 1 включен, сброс счетчиков 4 и 5 снят). Сигнал с регистра 2 запрещает прохождение через коммутатор 8 импульсов с генератора 3 и разрешает прохождение импульсов с выхода канала А
на вход канала Б и С, выхода счетчика 4 на вход канала В. Сигнал поступает также на генератор 3, включая его на повышение частоты - начинается разгон электропривода. Частота импульсов генератора 3 делится
0 каналом А таймера 1 и счетчиком 4 для получения необходимой рабочей частоты на вы- ходах 11, 12. Изменяя программно коэффициент деления канала А, можно получить различные значения рабочей частоты
5 на выходы 11, 12.
Так как рабочая частота на выходах 11, 12 пропорциональна частоте генератора 3, а частота генератора изменяется плавно, то разгон и торможение электропривода осу0 ществляется плавно, без апроксимации кривых разгона и торможения.
Для отработки перемещений без разгона (наладочный режим, рабочий режим с медленной подачей и т.д.) в регистр 2 зано5 сят код с . Сигнал , поступая на генератор 3, запрещает включение повы шенной частоты генератора 3.
Для отработки момента начала торможения по соответствующей кривой (N) в
0 разряды Д4Д7 регистра 2 заносят код
номера этой кривой. Установленный код номера группы поступает на вторую группу входов блока 6 для задания соответствующей зоны памяти блока б, где записана со5 ответствующая кривая (N). Коды соответствующих чисел К, изменяющиеся при заполнении счетчика 5, поступают с блока б на входы Б цифрового компаратора 7. Отработка момента начала торможения
0 осуществляется следующим образом.
Перед началом отсчета заданного перемещения счетчики 4 и 5 находятся в нулевом состоянии, а в каналы Б, В таймера 1 записано число N - число шагов полного переме5 щения. Со счетчика 4 на входы А компаратора 7 поступает код нуля. Нулевому состоянию счетчика 5 соответствует код числа К О на выходе блока 6, который подается на входы Б компаратора 7. При этом
0 компаратор 7 выдает сигнал , разрешающий прохождения импульсов с выхода каната А таймера 1 через коммутатор 8 на вход канала Б. По сигналу с регистра 2 начинается работа устройства: импульсы с
5 возрастающей частотой с генератора 3 поступают через канал А таймера 1 на счетчик 4 и на вход канала Б. Как только счетчик 4 отсчитает К импульсов, на выходе компаратора 7 исчезнет сигнал и поступление импульсов в канал Б прервется, а на счетчик
4 импульсы продолжают поступать Hnnvi сы с одного из выходов счетчика 1 пг гу 1 ют через логический коммутаюр 3 н t- л , канала В для отсчета перемрще-ни t , Р зультате за один цикп работы счет и i 4 н- канал Б поступит К импульсов а на кяшп 3 - один импульс Следовательно злпме ние канала Б происходит быстрее t R Импульсы с одного из выходов ГЧРПН i i i поступают на счетчик 5
Содержимое Р счетчика 5 выводи г из блок б которое преобразует код -н-r л г п код числа К Числа К записанныепЬ MO|-
J определяются из соотношение i,
Значения AN AL находят по п шим fi ji (см фиг 6) Интервал нпрсч „им I определяют исходя из вмГюаыюго ииг п i им тервалов эпроксимации ( 1гмк HIPTK ri точно 16 32 ин т р1з,э пг в) и I M i нелинейной части кривей I (N) i AL задают путем подключения входя г ( ni ков 5 к соответствующему разряду счрт (., ,
При изменении числа Р подчва г i блок 6 изменяется число К подавлр -г-1 m компаратор 7 В результате по мере нения счетчика 5 число импульсов гшг yn i ющих на канал Б таймера 1 Р каждом цпк it- работы счетчика 4 с компар-1 гром 7 мм няется и достигает мррез ррл (иклов ),н с i , импульса на цикл pjf ты м и К 1 ч, г и шагов на торможение ( j г )им
При увеличении м увеличивается заполнение ft,
нако при больших N заполнение i i(ji прекращается за его бло р ьи входу CN сигналом с оаного TI/ i ч го же счетчика В результат - -пт/ Км ся равным единиц ге при i i r значениях число шагов на тормс .ни С Ц не изменяется и остается таким .оки бм отработано при разгоне до мак ч частоты При малых значениях fj ч отработки не достигает максимального ты чения и число шагов на разгон и тормс р ние оказываются в функции на/и. зависимости от заданной величины пег оме щения
Так как в каналы Б В таймера 1 перед началом отработки пеоемещечич было э писано одно и то же число N а зэт- ч канала Б происходило быстрее кзна м Р t к моменту поступления на канал Ь N им , сов канал В отсчитает L импульсор i ipii с. счете числа N канал Б выдает сигнал nri генератор 3 который переключаете из -if нижение частоты - начнется юрможрн р электропривода Работа электроприио t , режиме торможения продопжтр-т j д
i,i) not d аннл И nf отсчитав д uui N
| ( в при Згим Иг- ьы-иде KdHr л 8 поя1 ит
j мм Ь н i ь-) п ними OMMyirf i р Ч Ос
1 (If JO I (НИ If I -Irtl M JL l ЦОС 1 ( ( S НЭ if- 01P бпИЗК 1 К HT igru НОИ ( ( раЗГО
ir чго обесттрчива i т|лапным и гц еии ион пыи брз выбегу станов пагпнпго
/It И ПРЛЯ
L- Mian с выхода кзналд В таймера 1 0 м м , q на млмстр тц Ю в качестве сигна- л дорога прерывания информирующего 1 с окончании отработки заданного пе г Отраоотка новою перемеще- t-1 идее т ВЛЯРТГЯ описанному ( -1 Mt
р м v л а изобретения
/i 10ИГТВО д,|я управпенич
T.fM- приводом содерчк щее гро(раммир4-г трр ашпьныи тяимер входы апиMI д IK- n и ддр° мыо входы которого
п i п , -за, пр рлемия к
РГ1Гif j i - if ГТроиСТВЗ К ЗД
-, м if й Ч ь ftix которого
по кгч iп i jo адресные вхоэ /iri и ьi, г РГП i On правления а
т J -КР 4(1 | т kM ИМПУЛЬСОВ
б U I fir Ц I M i о -« т щ е о i, ч тем
г с (IP
0 r 1 - pi,l
чт р i гi Ь i ,| i ppi-Hp обла i гг ын ГРНЫ уп- , ь ов f рвый и 1 оры при этом
М 1 1 i М П1 ИНЫХ к П М СТ-фШИХ
i п мп JH 1° т пер iti r и J r П°рВЫМ
ipif 5, s/iMil р,-,
; /Гi о n T HC L уР
I l( i i-VL j, Чfi Р-. Г Т i ;ГИЧССКОГО
0 i г -п , выхгд т ги гго риряда сое цш.гц г пх цом н/ ч чения г роггмммируе ni т р е ч к a aibMom т а м м о р а первым пп влгюшим входом сторого логического кпг му атопа ч вторим ВУОДОМ управляемо
Ь м сне ратора ов выхп/i четвертого p inrrpn грзвлем1я подключен к чх i м сСрос-. п ргзоп и второго счетчиков импульсов счртмыи в- од первого счетчика MMrijft ob подкп очен к выходу первого ка
П нэ ) пр )f рамгшрурмого трехканального
г ,, и первом/ им {.ормаципнному входу
em io логическою коммутатора второй
н i (Лпзционнии вход которого соединен с
p t iO i управлч мгго ffHfpdTOpa импуль
L cr 1 rixjflOM первою канала программиру- рмо т трр ланального таймера вход и h которого соединен с первым дом рторого логичес 0(и коммутатора 1 уод ретьРГи канала с вторыгч выходом второго /10гич ско(о коммутатора выход
второго канала гоединен с третьим входом управляемого генератора им пульсов, а выход третьего канал программируемого трехканального таймера подключен к первому инфор мационному входу первого логического коммутатора и через магистраль управления соединен с соответствующим внешним выходом запроса прерывания и выходом устройства, инфоомационные вы ходы первого счетчика импульсов соеди нены с первой группой входов компаратора, вторая группа входов которого подключена к группе выхо дов блока памяти нелинейных функ ций, информационные входы которого
0
5
соединены с информационными выходами второго счетчика импульсов, счетный вход которого соединен с выходом последнего разряда первого счетчика импульсов, выход последнего разряда второго счетчика импульсов - с CN-входом того же счетчика, выход четвертого разряда первого счетчика импульсов - с вторым информационным входом первого логического коммутатора и с третьим информационным входом второго логического коммутатора, второй управляющий вход которого подключен к выходу компаратора, а выходы первого логического коммутатора - к выходам устройства для управления шаговым электроприводом.
Фиг. 2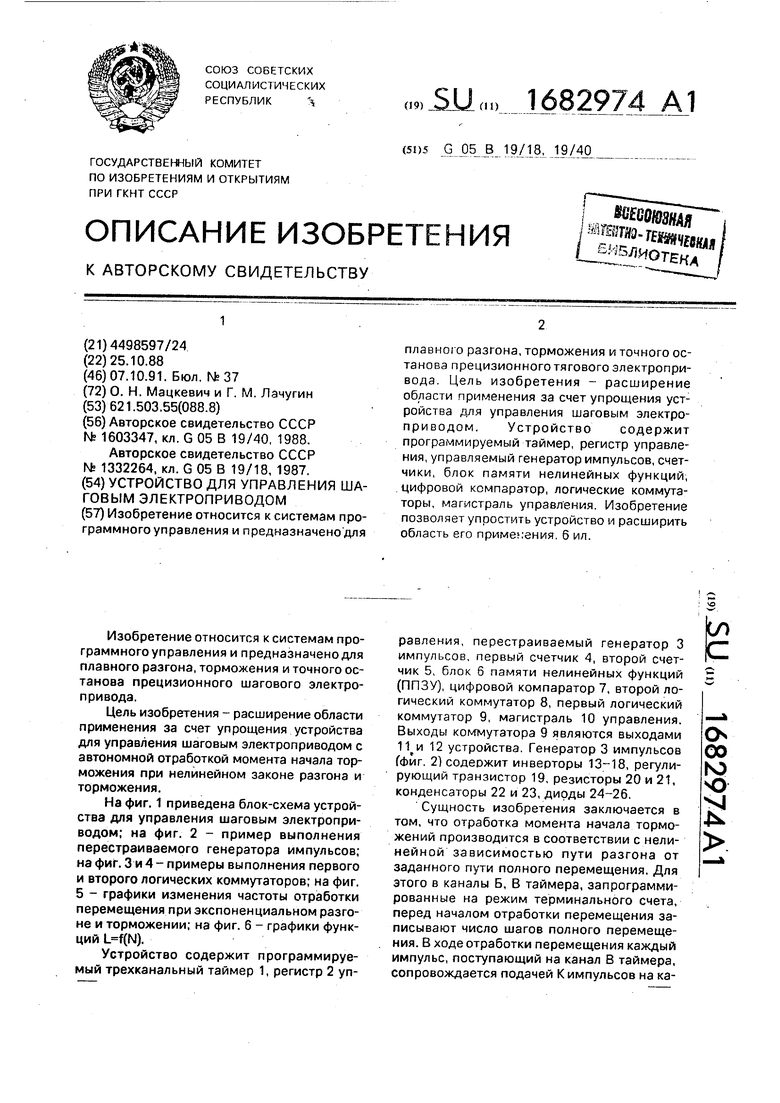
| название | год | авторы | номер документа |
|---|---|---|---|
| Программно-управляемый модуль | 1986 |
|
SU1403018A1 |
| Модуль для программного управления электроприводом | 1987 |
|
SU1509832A1 |
| Устройство для управления шаговым двигателем | 1983 |
|
SU1108600A1 |
| Устройство для управления шаговым электроприводом | 1988 |
|
SU1511736A1 |
| УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОГО РАЗГОНА И ТОРМОЖЕНИЯ | 1991 |
|
SU1817583A1 |
| Устройство для разгона и торможения электропривода | 1986 |
|
SU1386964A1 |
| Программно-управляемый модуль | 1986 |
|
SU1405028A1 |
| ЛИНЕЙНО-КРУГОВОЙ ИНТЕРПОЛЯТОР | 1991 |
|
RU2010293C1 |
| Устройство для управления асинхронным электродвигателем | 1990 |
|
SU1810978A1 |
| Устройство для управления шаговым двигателем | 1986 |
|
SU1334350A1 |
Изобретение относится к системам программного управления и предназначено для плавно о разгона, торможения и точного останова прецизионного тягового электропривода. Цель изобретения - расширение области применения за счет упрощения устройства для управления шаговым электроприводом. Устройство содержит программируемый таймер, регистр управления, управляемый генератор импульсов, счетчики, блок памяти нелинейных функций, цифровой компаратор, логические коммутаторы, магистраль управления Изобретение позволяет упростить устройство и расширить область его применения. 6 ил.
KS6i KM Фиг, 4
2900
500
юоо
500
Редактор С.Патрушева
Составитель И.Швец Техред М.Моргентал
дриг.з
10001500
Фиг. 6
2000
Корректор Муска
| Способ формирования последовательности импульсов для управления шаговым двигателем и устройство для его осуществления | 1987 |
|
SU1603347A1 |
| кл | |||
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Устройство для управления шаговым электроприводом | 1986 |
|
SU1332264A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
