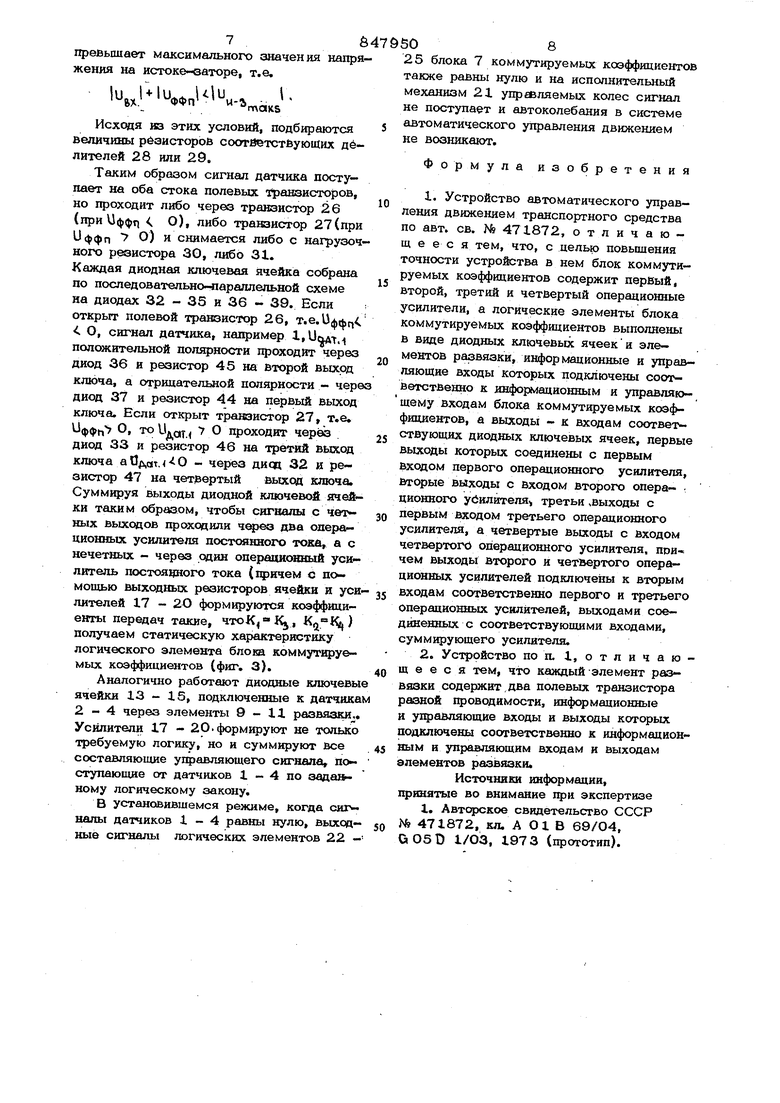
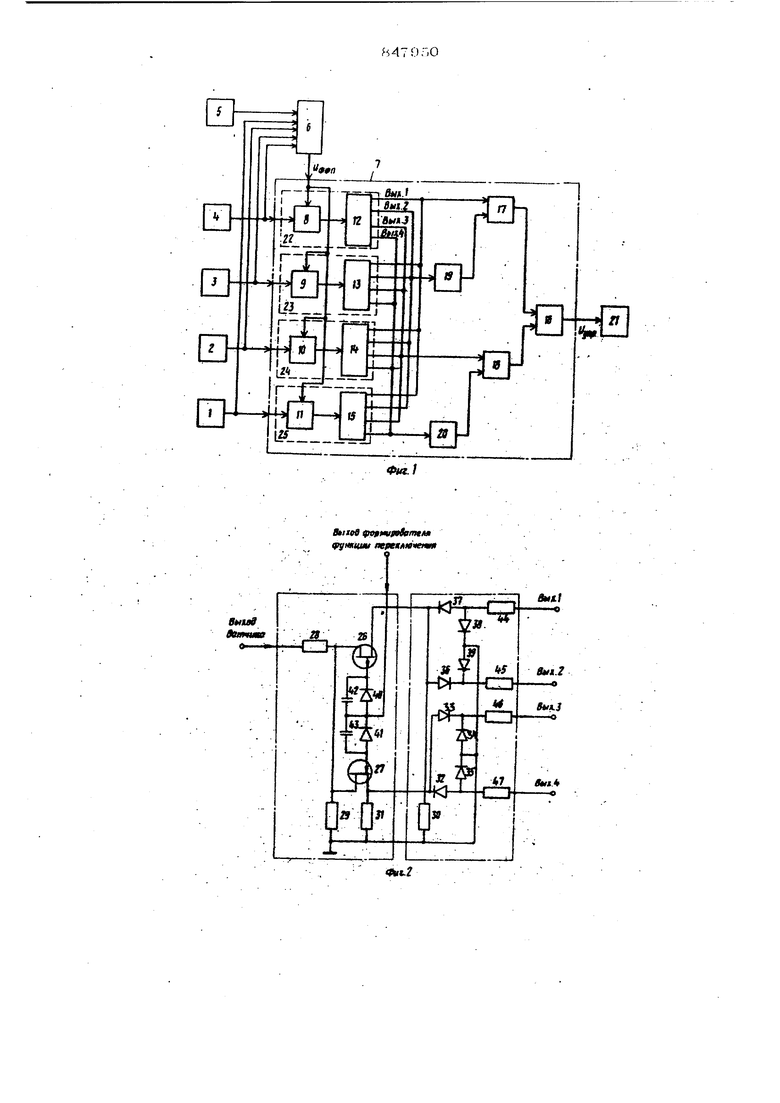
(54) УСТРС СТВО АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ДВИЖЕНИЕМ ТРАНСПОРТНОГО СРЕДСТВА Изобретение относится к автоматическому ухфавлению движением наземных нерельсовых транспортных средств вдоль заданного токонесущего кабелем напра вленш. По основному авт. св. №471872 известно устройство автоматического управления движением транспортного сред ства, содержащее датчик скорости движения; электронный регулятор с переменной структурой, включающий блок коммутируе мых коэффициентов с суммирующим усилителем постоянного тока; канал формирования функции переключения, состоящий из датчиков линей1юго отклонения, взаимодействующих с токонесущими кабелем и соединенных через резисторы с усилителем постоянного тока, формирователя функции переключения, управляющего блоком коммутируемых коэффициентов с логическими элементами; исполнительный, механизм; дополнительные каналы формирования функции переключения, состоящие cooTBeTCTBojfflo из датчиков курсового отклонения и скорости изменения курсового отклонения, угла поворота и скорости поворота управляемых колес и подключенные через нелинейные 4 нкциональш 1е преобразователи и соответствующие резисторы ко входу усилителя постоянного тока формирователя функции переключения, при этом датчики курсового отклонения, скорости изменения курсового отклонения и угла поворота ущэавляемых колес также связаны и со входами соответствующих логических элементов блока коммутируемых коэффициентов. Основой электронного регулятора с переменной структурой являются логические элементы блока коммутируемых коэффициентов, содержащие диодные ключевые ячейки, а основным режимом работы такого регулятора - скользящий режим, т.е режим переключения структур с большой частотой (2 - 4). Управляет диодными ключевыми ячейками выходной сигнал формирователя функции переключения. В скользящем режиме функция лереключения равна нулю, поэтому формирователь функции переключения обладает большой чувствительностью к изменению знака функции переключения при переходе ее через нулевое значение. Это достигает ся тем, что выходной элемент формирователя функции переключения имеет релейную характеристику с двумя устойчивыми состояниями, соответствующими положитель ному и отрицательному значению функции переключения. Когда в результате действия управляющего сигнала, сформированного регулятором с переменной структурой, объект занимает требуемое положение относительно щэедписанного маршрута и сигналы датчиков становятся равными нулю, то сигнал формирователя функции переключения принимает одно из своих двух значений (в зависимости от знака дрейфа операционных усилителей измерительных каналов и регулятора). Этот сигнал через цепи диодных ключевых ячеек попадает на выход логического элемента к образует ложный сигнал управления. В резулыгате этого статическая характеристика логического элемента блока коммутируемых коэффициет-ов имеет начальное ненулевое значение Cl Оянако подключение нескольких логических элементов к выходному суммирующему усилителю регулятора с переменной структурой приводит к увеличению уровня ложного сигнала управляющего воадвйстви который поступает на вход исполнительно го механизма управляемых колес. В результате этого управляемые коя&св псжср чиваются и датчики угла поворота и око- рости поворота управляемых колес выдаю информацию, хотя положение центра масс объекта относительно заданной траектории движения не изменилось, т.е. датчики линейного и курсового отклонений имеют нулевые значения. При этом сигналы датчиков угла поворота и скорости поворота управляемых колес суммируются с ложным сигналом и в системе автоматического управления движением возникаю автоколебания, не зависящие от внещних возмущающих факторов. Кроме того. Выходной сигнал формиро вателя функции переключения через цепи диодных ключевых ячеек логических элементов при нулевых сигналах датчиков положения центра масс объекта попадает на вход формирователя функции переключе ния и также способствует формированию ожного сигнала и возникновению автокс ебаний в системе автоматического управения движением, которые накладываются а основной скользявшй режим и ухудают его адаптивные свойства. Цель изобретения - повьпиение точноси устройства путем устранения автоколебаний в установившемся режиме работы. Поставленная цель достигается тем, что в блок коммутируемых коэффициентов введены первый, второй, третий и четвертый опередионные усилители, а логические элементы блока коммутируемых коэффициентов содержат диодные ключевые ячейки и элементы развязки, информационные и управляюпще входы которых подключены соответственно к информационному. и управляющему входам блока коммутируемых коэффициентов, а выходы - к входам соответствующих логических элементов, первые выходы которых соединены с первым входом первого операционного усилителя, вторые выходы - с входом второго операционного усилителя, третьи выходы с первым входом третьего операционного усилителя, а четвертые выходы с входом четвертого операционного усил теля, причем выходы второго к четвертого операционных усилителей подключешл к вторым входам соответственно первого и третьего операционных усилителей, выходами соединенных с соответствующими входами суммирующего усилителя. При этом каждый элемент развязки соде етсит по два полевых транзистора разной проводимости, информационные и управляющие входы и вьисоды которых подключены соответственно к информационным и управляющим входам и выходам элементов развязки. На фиг. 1 представлена блок-схема предлагаемого устройства; на фиг. 2 принципиальная схема логического элемента блока коммут1фуемых коэффициентов; на фиг. 3 - статическая характеристика логического элемента. Устройство автоматического угфавления движением транспортного средства (фиг. 1) содержит пять датчиков информации: линейного отклонения 1, курсового отклонения 2, скорости изменения курсового отклонения 3, угла поворота управляемых колес 4И скорости изменения угла поворота управляемых колес 5. При этом выходы всех датчиков 1-5 подключены ко входу формирователя 6 функции переключения, а выходы датчиков 1 - 4 подключены еще и к соответствующим 56 входам блока 7 коммутируемых коэффициентов через элементы 9-11 развязки., управляющие входы которых подсоед1шены к выходу формирователя 6 функции переключения. Выходы элементов и - 11 подсоединены к диодным ключевым ячейкам 12 - 15, имеющим по четыре выхода, щ)ичем нечетные выходы присоединен ко входу суммирующего усилителя 16 члрез первый 17 и третий 18 операцион- ные усилители постоянного тока, а четны через второй. 19 и четвертый 20 операционные усилители. Выход блока 7 комму тируемых коэффициентов связан с испол нательным механизмом 21 управляемых колес. Соответствующие пары из элемента развязки и диодной ключевой ячейки 8 12, 9 - 13, 1О - 14 и 11 - 15 образуют логические элементы 22 - 25 кана ла управления. Элемент развязки (фиг. 2) содержит два полевых транзистора 26 и 27 разной проводимости, входы которых (стоки) через делитель 28 и 29 подключены к выходу датчика 1 (2-4) информации, а выходы (истоки) через нагрузочные рези торы 30 и 31 подсоединены к диодным ячейкам элементов 32 - 35 и 36 - 39, а управляющие элементы (затворы через диоды 4О и 41, щунтированные конденса торами 42 и 43, подключены к выходу формирователш 6 функции переключения. Выходные резисторы 44 - 47 образуют четыре выхода логического элемента. Устройство работает следующим образом. Формирователь 6 функции переключения определяет моменты переключения у1фав- ляющего сигнала U воздействующего на исполнительный механизм 21 при по- явлении сигналов с выходов датчиков 1, 2f информации и соответствующих сигналов производных с выходов датчиков 3 и 5. Блок 7 коммутируемых коэффициентов скачком изменяет коэффициенты передач с К до Kri по каждому каналу управления формируемому датчиками 1 - 4. В результате этого между дв;умя соседними моментами переключения управляющий сигнал изменяется по линейному закону, а в моменты переключения - скачком. Блок 7 коммутируемых коэффициентов по каждому каналу управления выполняет нелинейное преобразование. Например по каналу линейного отклонения Хатл Ри АОТ. 0 Vn и а SV. иф,п 1 VT. V.a бидат.б где и - напряжение управления по каналу линейного отклонения; .r выходное напряжение датчика 1J Ць|Ь выходное напряжение формировотеля функции переключения 6, равное сумме сигналов датчиков 1-5 информации с соответствующими коэффициентами передас ми коэффициентам и передач С; K,, коэффшшекты передач отрицательной и положительной обратной связи в управляющем сигнале по каналу линейного отклонения. Аналогичное нелинейное преобразование выполняется датчиками курсового отклонения 2, скорости изменения курсового отклонения 3 и угла поворота управляемых. колес 4. Суммирование всех составляющих управления осуществляет выходной усилитель 16. Моменты переключения управлякяцего сигнала соответствуют моментам изменения знака 4УИК11Ш1 переключения (Cj х UAOIT. Catrft.ar.a s APrrs ) щж переходе черва нулевое значение, поэтому в форм1фователе 6 функции переключения достаточно только ощзеделять знак суммарного сигнала. Напряжение с выхода формирователя 6 функции переключения ( ) у1фавляет через элементы 8-11 работой диодных ключе ох ячеек 12 - 15. Полевой транзист 45 опфывается тогда, когда напряжение на его затворе равно нулю (фиг. 2). Для трвизистора 26 нулевое напряжение на затворе будет при закрытом диоде 4О, т.е. при U(n О При такой пол5фности сигнала формирователя 6 функции переключения транзистор 27 залфьрг, так как открытый диод 41 пропускает сип-сал Оффп затвор. Конденсаторы 42 и 43, шунтщэующие иоды 4О и 41, увеличивают быстроействие диодной ключевой ячейки. Для работы полевого транзистора в лючевом режиме его выходное напряжение о абсолЕотной величине меньше управляющего напряжения, . |Uj,vUIU$(|,nK Это условие выполняется с помощью оответствующих делителей 28 или 29. Кроме того, сумма абсолютных величин ходного напряжения и управляющехч) не
превьпиает максимального значения напряжения на истоке-ваторе, т.е.
.
,,
Исходя вз этих условий, подбираются величины резисторов соотйетстбуюших делителей 28 или 29.
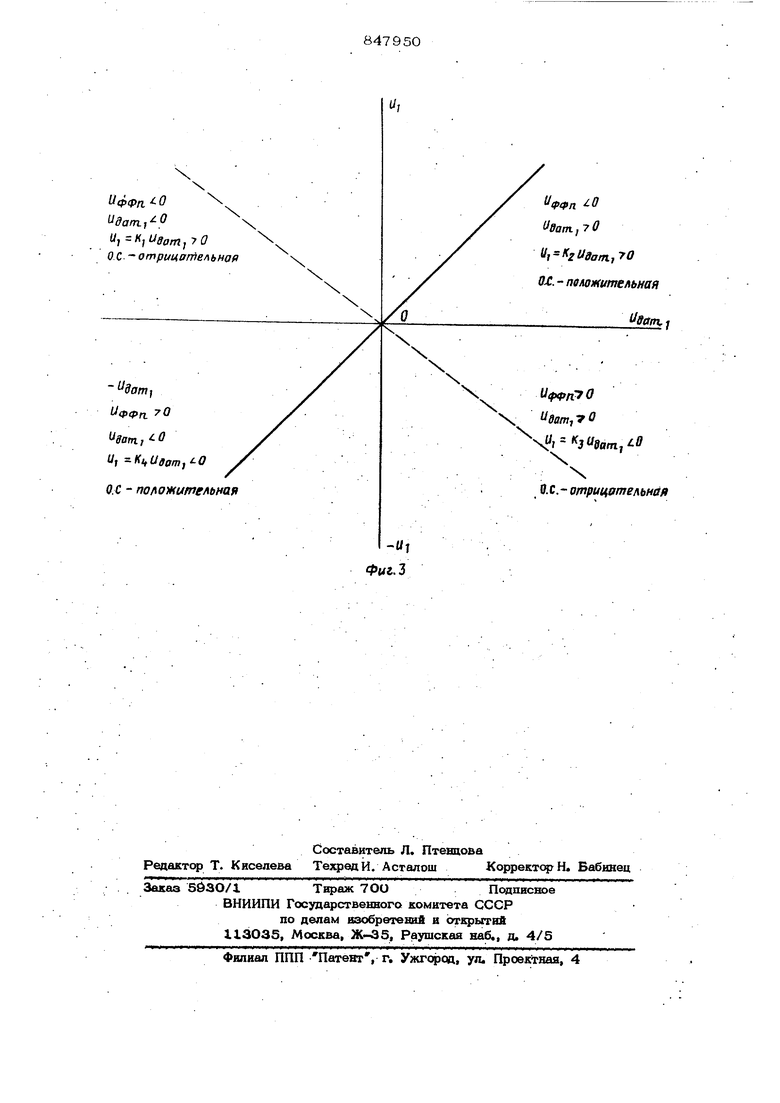
Таким образом сигнал датчика поступает на оба стока полевых транзисторов, но проходит либо через транзистор 26 (при U( О), либо транзистор 27(при иффп -) я снимается либо с нагрузочного резистора 30, либо 31. Каждая диодная ключевая ячейка собрана по последовательнонпараллельной схеме на диодах 32 - 35 и 36 - 39. Если открыт полевой транзистор 26, т.е. ифй,г, О, сигнал датчика, например l,UuAt. положительной полярности проходит через диод 36 и резистор 45 на Второй выход ключа, а отрицательной полярности - чере диод 37 и резистор 44 на первый выход ключа. Если открыт транзистор 27, т.е. , О, то UAQII О проходит через диод 33 и резистор 46 на третий выход ключа аОдат.-40 - через диоп 32 и резистор 47 на четвертый выход ключа. Суммируя Выходы диодной ключевой ячейки таким образом, чтобы сигналы с четных выходов проходили 4qpeo два олера ционных усилителя постоянногч) тока, а с нечетных - через один операционный усилитель постоящюго тока (причем с помощью выходных резисторов ячейки и усилителей 17 - 20 формируются коэффициенты передач такие, чтоК,, К,1 ) получаем статическую характеристику логического элемента блока коммутируемых коэффициентов (фиг. 3). Аналогично работают диодные ключевые ячейки 13 - 15, подключенные к датчика 2-4 через элементы 9-11 развязки. Усилители 17 - 2р.формируют не только требуемую логику, но и суммируют все составляющие угфавляющего сигнала, поступающие от датчиков 1 - 4 по задахн ному логическому закону. В установившемся режиме, когда сигналы датчиков 1-4 равны нулю, выходные сигналы логических элементов 22 -
25 блока 7 коммутируемых коэффициентов также равны нулю и на исполнительный механизм 21 управляемых колес сигнал не поступает и автоколебания в системе автоматического управления движением не возникают.
Формула изобретения
1. Устройство автоматического управления движением транспортного средства по авт. св. № 471872, отличающееся тем, что, с целью повышения точности устройства в нем блок коммутируемых коэффициентов содержит первый, второй, третий и четвертый операционные усилители, а логические элементы блока коммутируемых коэффициентов выполнены в виде диодных ключевых ячееки элементов развязки, информационные и управляющие входы которых подключены соответственно к информационным и управляющему входам блока коммутируемых коэффициентов, а выходы - к входам соответствующих диодных ключевых ячеек, первы выходы которых соединены с первым входом первого операционного усилителя. Вторые выходы с входом второго операционного убилителя третьи выходы с первым входом третьего операционного усилителя, а четвертые выходы с входом четвертого операционного усилителя, поичем выходы второго и четвертого операционных усилителей подхслючены к вторым входам соответственно первого и третьего операционных усилителей, выходами соединенных с соответствующими входами, суммирующего усилителя. 2. Устройство по п, 1, о т л и ч а ю щ е е с я тем, что каждый элемент развязки содержит два полевых транзистора разной проводимости, информационные и управляющие входы и выходы которых подключены соответственно к информационным и управляющим входам и выходам элементов развязки. Источники информации, принятые во внимание при экспертизе I. Авторское свидетельство СССР № 471672, кл. А О1 В 69/04, G05D 1/ОЗ, 1973 (прототип).
Лиев fofHifetfmt Фумгщя/ ае еялмчеин
внм.{ . (Jdamj O ,tJaamjfO ОС отрицагт ельная иффг1 70 дат.,0 и, -Ki Uaomj O О.с - по/(ожител1 нап (дат.,70 и, 1(21/90,70 0. - поло)Нительиая tJsam, f damifO y, fj( 9.с.-отрицртельна/1
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство автоматического управления движением транспортного средства | 1973 |
|
SU471872A1 |
| Ключевой стабилизированный конвертер | 2023 |
|
RU2810649C1 |
| Двуполярный программируемый источник тока и напряжения | 1985 |
|
SU1335958A1 |
| АНАЛОГО-ЦИФРОВОЙ ПРЕОБРАЗОВАТЕЛЬ ИНТЕГРИРУЮЩЕГО ТИПА ДЛЯ ИЗМЕРЕНИЯ МАЛЫХ ЭЛЕКТРИЧЕСКИХ СИГНАЛОВ | 2018 |
|
RU2693647C1 |
| Стабилизированная система электропитанияНА бАзЕ пьЕзОТРАНСфОРМАТОРА | 1979 |
|
SU851687A1 |
| УСТРОЙСТВО АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ДВИЖЕНИЕМ ТРАНСПОРТНОГО СРЕДСТВА | 1973 |
|
SU377102A1 |
| Преобразователь напряжения с защитой от перегрузок | 1982 |
|
SU1157626A1 |
| КОММУТАТОР НАПРЯЖЕНИЯ С ЗАЩИТОЙ ОТ ПЕРЕГРУЗКИ ПО ТОКУ | 2013 |
|
RU2599190C2 |
| Устройство для управления двухфазным асинхронным электродвигателем | 1983 |
|
SU1089747A1 |
| Перестраиваемый RC-генератор | 1982 |
|
SU1107252A1 |
-«Т Фиг. 3
