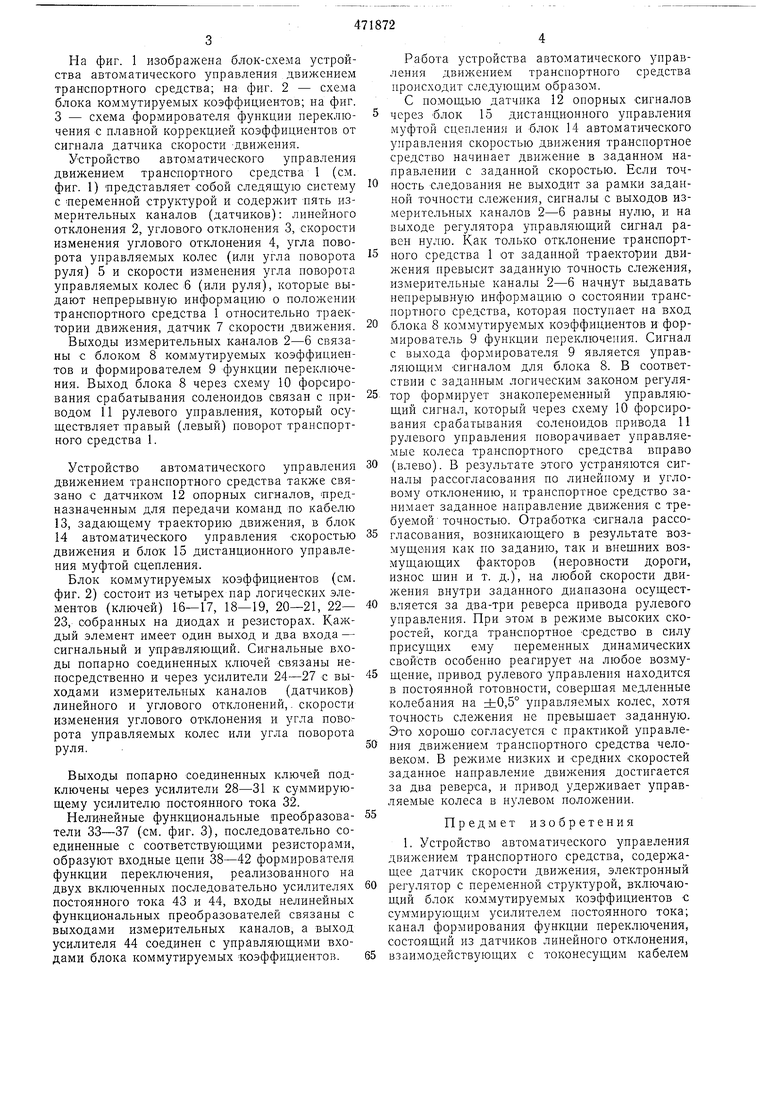
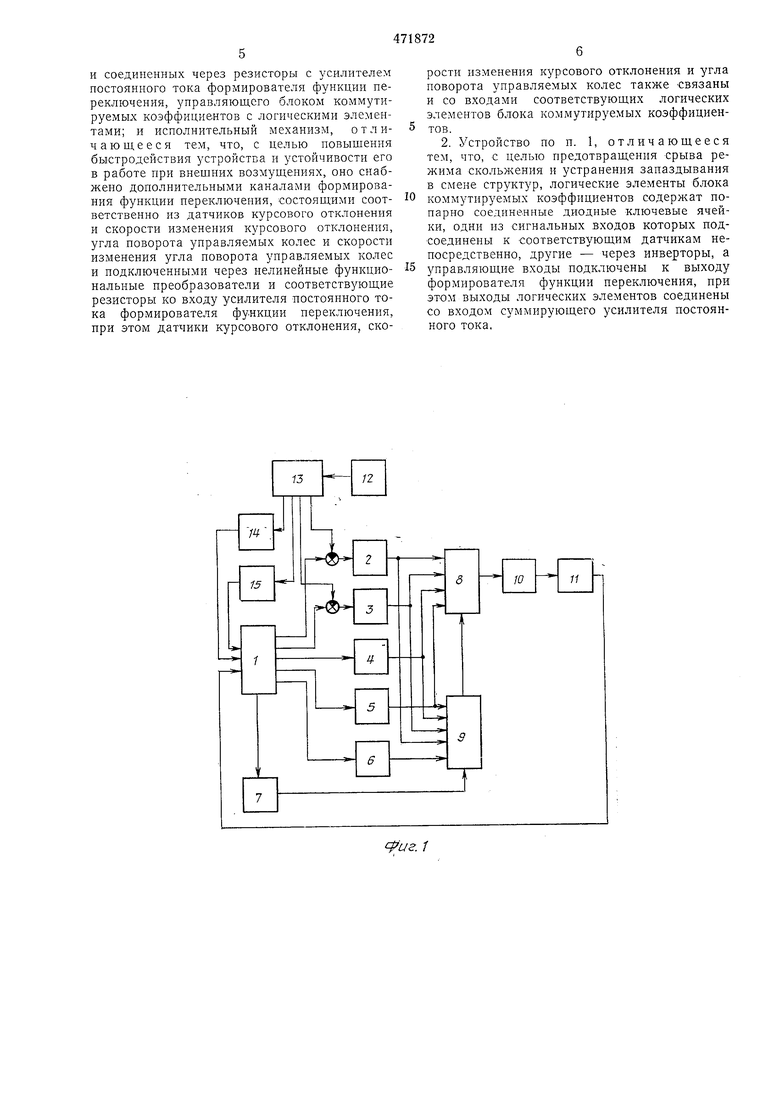
На фиг. 1 изображена блок-схема устройства автоматического управления движением транспортного средства; на фиг. 2 - схема блока коммутируемых коэффициентов; на фиг. 3 - схема формирователя функции переключения € плавной коррекцией коэффициентов от сигнала датчика скорости движения. Устройство автоматического управления движением транспортного средства 1 (см. фиг. 1) представляет собой следящую систему с неременной структурой и содержит пять измерительных каналов (датчиков): линейного отклонения 2, углового отклонения 3, скорости изменения углового отклонения 4, угла поворота управляемых колес (или угла поворота руля) 5 и скорости изменения угла поворота управляемых колес 6 (или руля), которые выдают непрерывную информацию о положении траноиортного средства 1 относительно траектории движения, датчик 7 скорости движения. Выходы измерительных каналов 2-6 связаны с блоком 8 коммутируемых коэффициентов и формирователем 9 (функции переключения. Выход блока 8 через схему 10 форсирования срабатывания соленоидов связан с ириводом 11 рулевого управления, который осуществляет правый (левый) поворот транспортного средства 1. Устройство автоматического управления движением транспортного средства также связано с датчиком 12 опорных сигналов, Предназначенным для передачи команд но кабелю 13, задающему траекторию движения, в блок 14 автоматического управления скоростью движения и блок 15 дистанционного управления муфтой сценления. Блок коммутируемых коэффициентов (см. фиг. 2) состоит из четырех нар логических элементов (ключей) 16-17, 18-19, 20-21, 22- 23, собранных на диодах и резисторах. Каждый элемент имеет один выход и два входа - сигнальный и управляющий. Сигнальные входы попарно соединенных ключей связаны непосредственно и через усилители 24-27 с выходами измерительных каналов (датчиков) линейного и углового отклонений, - скорости изменения углового отклонения и угла поворота управляемых колес или угла поворота руля. Выходы попарно соединенных ключей подключены через усилители 28-31 к суммирующему усилителю постоянного тока 32. Нелинейные функциональные преобразователи 33-37 (см. фиг. 3), последовательно соединенные с соответствующими резисторами, образуют входные цени 38-42 формирователя функции переключения, реализованного на двух включенных последовательно усилителях постоянного тока 43 и 44, входы нелинейных функциональных преобразователей связаны с выходами измерительных каналов, а выход усилителя 44 соединен с управляющими входами блока коммутируемых коэффициентов. Работа устройства автоматического управления движением транспортного средства происходит следующим образом. С помощью датчика 12 опорных сигналов через блок 15 дистанционного управления муфтой сцепления и блок 14 автоматического управления скоростью движения транспортное средство начинает движение в заданном направлении с заданной скоростью. Если точность следования не выходит за рамки заданной точности слежения, сигналы с выходов измерительных каналов 2-6 равны нулю, и на выходе регулятора управляющий сигнал равен нулю. Как только отклонение транспортного средства 1 от заданной траектории движения превысит заданную точность слежения, измерительные каналы 2-6 начнут выдавать непрерывную информацию о состоянии транспортного средства, которая поступает па вход блока 8 коммутируемых коэффициентов и формирователь 9 функции переключения. Сигнал с выхода формирователя 9 является управляющим сигналом для блока 8. В соответствии с заданным логическим законом регулятор формирует знакопеременный управляющий сигнал, который через схему 10 форсирования срабатывания соленоидов привода 11 рулевого управления поворачивает управляемые колеса транспортного средства вправо (влево). В результате этого устраняются сигпалы рассогласования по линейному и угловому отклонению, и транспортное средство занимает заданное направление движения с требуемой точностью. Отработка сигнала рассогласования, возникающего в результате возмущения как по заданию, так и внещних возмущающих факторов (неровности дороги, износ щин и т. д.), на любой скорости движения внутри заданного диапазона осуществляется за два-три реверса нривода рулевого управления. При этом в режиме высоких скоростей, когда транспортное средство в силу присущих ему переменных динамических свойств особенно реагирует «а любое возмущение, привод рулевого управления находится в постоянной готовности, соверщая медленные колебания на dzO,5° управляемых колес, хотя точность слежения не превыщает заданную. Это хорощо согласуется с практикой управления движением транспортного средства человеком. В режиме низких и средних скоростей заданное направление движения достигается за два реверса, и привод удерживает управяемые колеса в нулевом положении. Предмет изобретения 1. Устройство автоматического управления движением транспортного средства, содержащее датчик скорости движения, электронный егулятор с переменной структурой, включаюий блок коммутируемых коэффициентов с уммирующпм усилителем постоянного тока; анал формирования функции переключения, остоящий из датчиков линейного отклонения, взаимодействующих с токонесущим кабелем
и соединенных через резисторы с усилителем постоянного тока формирователя функции переключения, управляющего блоком коммутируемых коэффициентов с логическими элементами; ц иснолнительный механизм, отличающееся тем, что, с целью новышення быстродействия устройства и устойчивости его в работе ири внешних возмущениях, оно снабжено дополнительными каналами формирования функции переключения, состоящими соответственно нз датчиков курсового отклонения и скорости изменения курсового отклонения, угла поворота управляемых колес и скорости изменения угла поворота управляемых колес и подключенными через нелинейные функциональные преобразователи и соответствующие резисторы ко входу усилителя ностоянного тока формирователя функции переключения, цри этом датчики курсового отклонения, скоростн изменения курсового отклонения и угла новорота управляемых колес также Связаны и со входами соответствующих логических элементов блока коммутируемых коэффициентов.
2. Устройство по п. 1, отличающееся тем, что, с целью предотвращения срыва режима скольжения и устранения запаздывания в смене структур, логические элементы блока коммутируемых коэффициентов содержат попарно соединенные диодные ключевые ячейки, одни нз сигнальных входов которых подсоединены к соответствующим датчикам непосредственно, другие - через инверторы, а управляющие входы подключены к выходу формирователя функции нереключения, при этом выходы логических элементов соединены со входом суммирующего усилителя постоянного тока,
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство автоматического управ-лЕНия дВижЕНиЕМ ТРАНСпОРТНОгО СРЕдСТВА | 1979 |
|
SU847950A2 |
| УСТРОЙСТВО АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ДВИЖЕНИЕМ ТРАНСПОРТНОГО СРЕДСТВА | 1973 |
|
SU377102A1 |
| Система автоматического управления траекторным движением транспортного средства с функцией курсовой устойчивости | 2019 |
|
RU2724008C1 |
| Устройство для автоматического вождения транспортного средства | 1981 |
|
SU949383A1 |
| Способ управления антиблокировочной системой, противобуксовочной системой и системой курсовой устойчивости транспортного средства и устройство для его осуществления | 2020 |
|
RU2751471C1 |
| УСТРОЙСТВО ПОМОЩИ ПРИ ВОЖДЕНИИ В ПОЛОСЕ | 2014 |
|
RU2647823C2 |
| Тренажер оператора транспортных средств | 1984 |
|
SU1265830A1 |
| РУЛЕВОЕ УПРАВЛЕНИЕ ТРАНСПОРТНОГО СРЕДСТВА | 1999 |
|
RU2157327C1 |
| Устройство для регулирования частоты вращения тяговых двигателей прицепа транспортного средства | 1981 |
|
SU1004169A2 |
| Система управления активными подвесками транспортного средства | 1988 |
|
SU1572838A1 |

На 6)(od пены срорсиробания
(ffj9.z 32,
Bbiwd датчика скорости движения
W
HaijnpadnmLUueSwdbi 5лока коммутирующие. коз(р(рициентоб
и.
