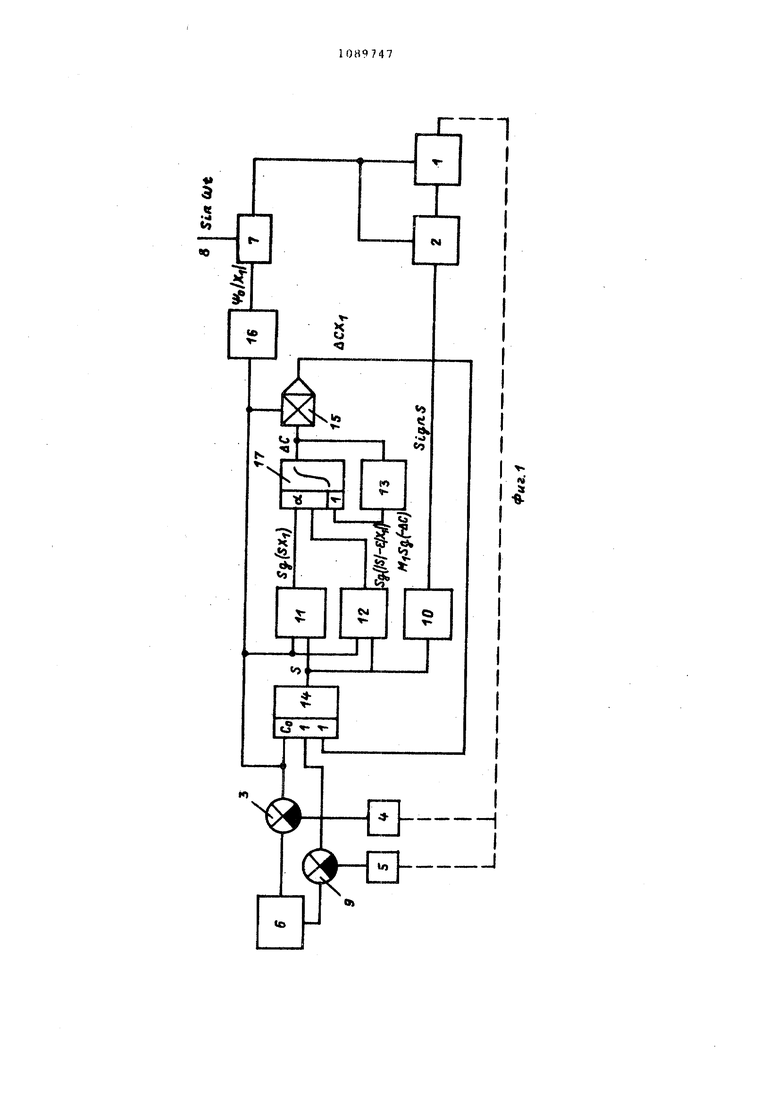
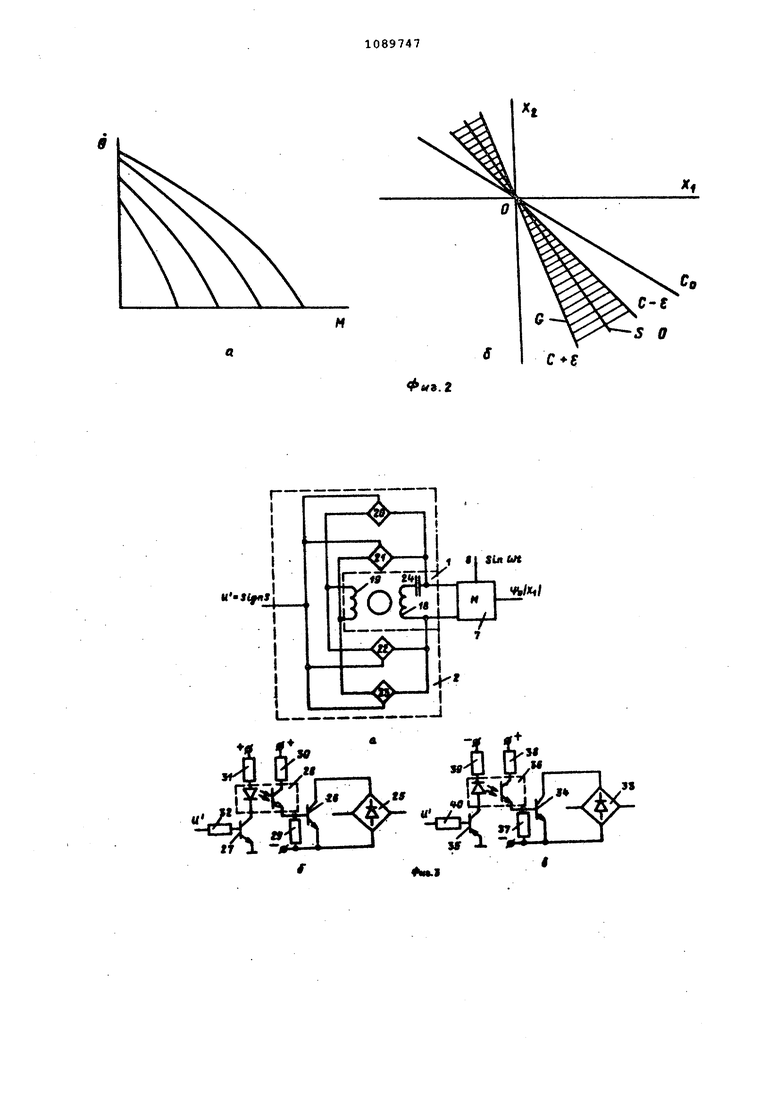
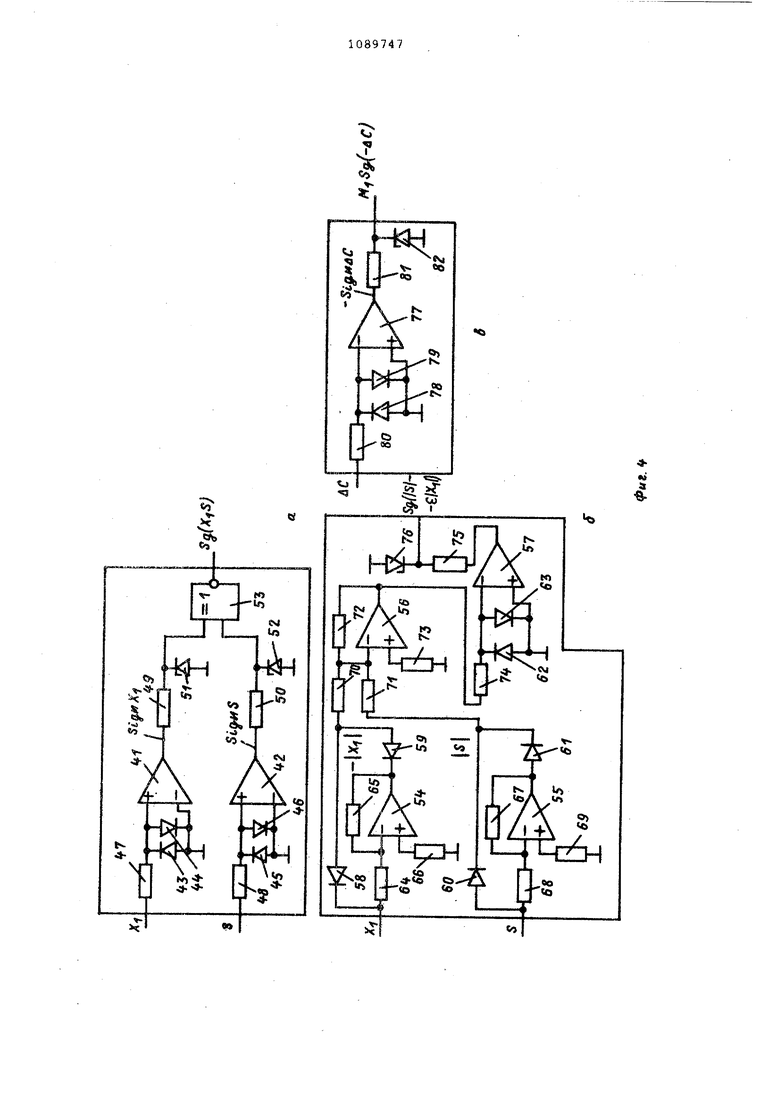
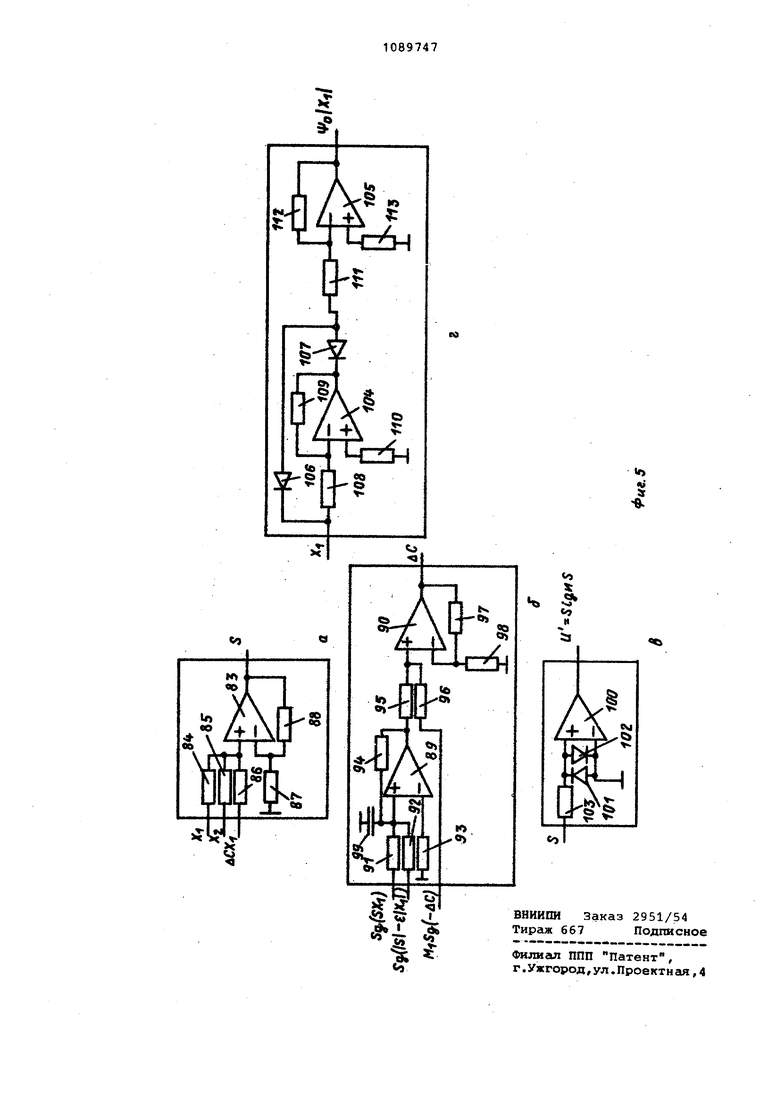
Изобретение относится к электро технике и может быть использовано системах следящих электроприводов с двухфазным асинхронным электродв гателем. Известно устройство для управле ния двухфазным асинхронным электро двигателем, содержащее блок питания с двумя усили±елями, подключен ными к обмоткам возбуждения и упра ления tl Недостатком известного устройст ва является небольшое быстродействие, что существенно ограничивает область его использования. Наиболее близким по технической сущности и достигаемому результату к предлагаемому является устройство для управления двухфазным асинхронным электродвигателем, содержа щее первый элемент сравнения, тахогенератор, датчик положения на валу двигателя, блок задания и источник питания, причем к первому и второму входам первого элемента ср нения соответственно подключены пер вый выход блока задания и выход дат чика положения на валу .двигателя 2 Недостатком известного устройства является то, что уравнение линии переключения, реашизуемое в устройс ве, будет определять оптимальное по быстродействию движение системы лишь для одной точки на механическо характеристике двигателя, а для остальных точек движения системы не будет оптимальным по быстродействию По этой же причине устройство мо жет потерять устойчивость, поскольку коэффициенты модели двигателя, являющейся основой оптимального по быстродействию алгоритма управле ния, являются переменными величинам в частности определяются нелинейным механическими характеристиками электродвигателя, а алгоритм этого не учитывает. Цель изобретения - повышение точ ности управления двухфазным асинхро ным электродвигателем. Указанная достигается тем, что в устройство,для управления двухфазным асинхронным электродвига телем, содержащее первый элемент сравнения, тахогенератор, датчик положения на валу двигателя, блок задания и источник питания, причем первому и второму входам первого эл мента сравнения соответственно подключены первый выход блока задания и выход датчика положения на валу двигателя, введены второй элемент сравнения, сумматор и три логически блока, реализующих соответственно логические функции 4().5(15l-E|x,|),(-dC|, s(i;: ,«0; ., где а - любое число; переменная, знак которой опре деляет направление вращения электродвигателя; отклонение углового положения ротора двигателя от заданной величины,приращение степени затухания переходного процесса x(tl где t- время, g, константы, интегросумматор, блок умножения, компаратор, блок вычисления модуля, коммутатор, модулятор, причем первые входы сумматора, первого и второго логи еских блоков, блока умножения, блока вычисления модуля подключены к выходу первого элемента сравнения, к первому и второму входам второго элемента сравнения подключены соответственно второй выход блока задания и выход тахогенератора, а выход второго элемента сравнения подключен к второму входу сумматора, к третьему входу сумматора подключен выход блока умножения, выход сумматора подключен к вторым входам первого и второго логических блоков и к входу компаратора, выход которого подключен, к первому входу коммутатора, выход первого, второго и третьего логических блоков соответственно подключены к первому, второму и третьему входам интегросумматора, а его выход подключен к второму входу блока умножения и к входу третьего логического блока, выход блока вычисления модуля подключен к второму входу модулятора, первый вход модулятора подключен к источнику питания, выход модулятора подключен к второму входу коммутатора и к обмотке возбуждения электро двигателя, выход коммутатора подключен к обмотке управления эг.ектродвигателя. На фиг.1 изображена структурная схема устройства для управления двухфазным асинхронным электродвигателем; на фиг.2а - типовые мехаиичес кие характеристики электродвигателя J б - положение линии переключения на фазовой ПЛОСКОСТИ; на фиг.З а, б, в - возможные варианты реализации выходного каскада коммутатор-модулятор-электродвигатель ; на фиг.4 а,б,в - реализация первого, второго и третьего логических блоков на фиг. 5 а,б,в,1- реализация сумматора, интегросумматора, компаратора и блока вычисления модуля. Устройство содержит (фиг.1) двухфазньай асинхронный электродвигатель 1, коммутатор 2, первый элемент 3 сравнения, датчик 4 положения и тахогенератор 5 на валу электродвигателя 1, блок 6 задания, модулятор 7, источник 8 питания, второй элемент 9 сравнения, компаратор 10, первый, второй и третий логические блоки 11,12 и 13,сумматор 14,блок 1 умножения, блок 16 вычисления модуля, иктегросумматор 17. Выхода тахо генератора 5 и датчика 4 положения подключены к вторым входам соответственно второго и первого элементов сравнения 9 и 3, первые входы которых подключены соответственно к второму и первому выходам блока 6 задания. Выход первого элемента 3 сравнения подключен к первым входам сумматора 14, логических блоков 11 Н.12, блока 15 умножения и к входу блока 16 вычисления модуля.Вторые входы логических блоков 11 и 12,вхо компаратора 10 подключены к выходу сумматора 14, второй вход которого подключен к выходу второго элемента 9 сравнения, а третий вход подключен к выходу блока 15 умножения Первый, второй и третий логические блоки 11, 12 и 13 своими выходами подключены соответственно к первому, второму и третьему входам интегросумматора 17, выход которого подключен к второму входу блока 15 умножения и к входу третьего логического блока 13. Выход блока 16 вычисления модуля подключен к второ му входу .модулятооа 7, пеовый вход КОТОРОГО подключен к ИСТОЧНИКУ питания 8, выход модулятора 7 подключен к второму входу колвдутатора 2 и к обмотке 18 возбуждения (фиг. 3 а ) электродвигателя 1, первый вхо коммутатора 2 подключен к выходу ко паратора 10, выход коммутатора 2 подключен к обмотке 19 управления электродвигателя 1. Выходной каскад коммутатор-моду лятор- электродвигатель содержит 1ФИГ.З а) электродвигатель 1 с обмотками возбуждения и управления 18 и 19, коммутатор 2, модулятор 7 источник 8 питания. Коммутатор 2 содержит четыре ключа 20-23, конде сатор 24. На фиг.З б показана принципиальная электрическая схема ключей 2023. Она содержит диодный мост 25, транзисторы 26 и 27, оптрон 28, резисторы 29-32. На фиг.36 изображен принципиальная электрическая схема ключей 21-22. Она содержит диодный мост 33, транзисторы 34-35, оптрон 36, резисторы 37-40. Реализация первого, второго и третьего логических блоков 11, 12 и 13 показана соответственно на фиг.4 а, 4 б и 4 в. Первый логичес кий блок 11 содержит операционные усилители 41 и 42, диоды 43-46; ре зисторы 47-50, стабилитроны 51 и 52, элемент ИСКЛЮЧАЮЩЕЕ ИЛИ 53. Второй логический блок 12 содержит операционные усилители 54-57, диоды 58-63, резисторы 64-75, стабилитрон 76. Третий логический блок 13 содержит операционный усилитель 77, диоды 78 и 79, резисторы 80 и 81, ста-билитрон 82. На фиг.5 а,б,в,г изображены принципиальные электрические схемы соответственно сумматора 14, интегросумматора 17, коммутатора 10 и блока 16 вычисления модуля. Сумматор 14 содержит операционный усилитель 83 и резистор)ы 84-88. Интегросумматор 17 содержит операционные усилители 89-90, резисторы 91-98, конденсатор 99. Компаратор 10 содержит операционный усилитель 100, диоды 101 и 102, резистор 103. Влек 16 вычисления модуля содержит усилители 104 и 105, диоды 106 и 107, резисторы 108-113. Устройство работает следующим образом. Сигналы задания углового положения и скорости ротора, поступающие с блока 6згщания сравниваются с текущими значениями этих величин, поступанвдими с датчика 4 положения и тахогенератора 5, соответственно в первом и втором элементах 3 и 9 сравнения. На выходах элементов 3 и 9 сравнения вырабатывгиотся сигналы, пропорциональные отклонениям углового положения и угловой скорости электродвигателя 1 от заданной величины. Сумматор 14, три блока 11, 12 и 13,интегросумматор 17, блок 15 умножения, компаратор 10 вырабатывают сигнал знака некоторой величины S(см.ниже), а блок вычисления модуля 16 вырабатывает сигнал,пропорциональный VQ(,Эти сигналы поступают соответственно на входы модулятора 7 и коммутатора 2, выходы которых соответственно подключены к обмоткам возбуждения 18 и управления 19 электродвигателя 1. Модулятор 7 и коммутатор 2 так меняют амплитуду н знак напряжения источника 8 питания, поступающего на обмотки 18 и 19, чтобы свести угловые рассогласования к нулю, поддерживая высокое качество управления (см.ниже) при возможных изменениях динамических параметров электродвигателя 1. Остановимся более подробно на алгоритме управления электродвигателем 1. Уравнение движения электродвигателя 1 в области рабочей точки имеет следующий вид: e -«Q0-fcu где и - действующее значение напряжения на обмотке управления электродвигателя,9,6 иЙ - угловое отклонение от номинального положения ротора и первая и вторая производные этой величины по вре мени/ (.- коэффициенты, зависящие от момента инерции нагрузки на валу электродвигателя 3 , а также от положения рабочей точки, характеризуемого у гловой частотой вращения 0 и моментом вращения -dM/de dM/c9o -3-i где производные вычислены в окрестности точки (бд и Мд). Перепишем уравнение (1J в нормал ной форме. Обозначая , , Х2 -адХз-ко. (21 Отметим, что в системе (2) коэффициенты к переменные, так как переменные величины и cJM/cJu вычисляемые вдоль механических характеристик электродвигателя в каждой рабочей точке (фиг,2 а), т,е, , ««кс «н макс - 3 Устройство позволяет управлять электродвигателем таким образом, чтобы обеспечить максимальное быстродействие движения в скользящем ре жиме для каждого набора параметров из условия (3|, Для этой цели вводится скользящий режим. Алгоритм при этом имеет вид u.VJxJsi- nS , (4) , где (51 - уравнение линии переключ ния 5 с угловым коэффици ентом С, постоянный коэффициент. Согласно (.2) и ( б V найдется такое VQ , что при любых начальных условиях для всех К из (31 вектор состояния(х Х,Х2 |(т - символ транспонирования) попадет на линию 5 0 , после чего в системе возникнет движение в скользящем режиме, описываемое уравнением (7 Это уравнение инвариантно к изменениям параметров электродвигателя 1, если не применять адаптацию, В то же время быстродействие систе мы повышается, если для каждого набора параметров а и К из (3 выб рать максимально возможное значение С из области (61 методом адаптации. Таким образом, линия переключения 5 (фиг,2 становится нестационарной за счет изменения коэффициента С it.(,s)-s(isi-e(xj)M,.s(-dC), (81 C-Co tAC, d-const . 3,0 г где « - любое число, М oi g - малая положительная величина, ( (фиг. 2 б), CQ - максимальное фиксированное значение коэффициента С, при котором всегда выполняется (6). Алгоритм адаптации обеспечивает увеличение коэффициента С без нарушения ограничения (6). Третье слагаемое в выражении (8) обеспечивает выполнение неравенства ОХИ.. Далее будем пользоваться плоскостью х, Х2 .(фиг. 2 б|. Не нарушая общности, рассмотрим полуплоскость . Вне заштрихованной области G (в которой S(,(| г о при согласно (8) величина ,т,е, положение линии переключения не меняется, В области G при коэффициент С увеличивается, а при величина С вновь равна нулю. Вне области & коэффициент С умень шается (но не менее, чем до величины GC,;. Покажем теперь, каким образом в устройстве осуществляется процесс адаптации. Пусть вектор состояния попал на границу области G , определяемую уравнениями (С-е)х +Х2 0, согласно (8 ) с этого момента времени величина с начинает возрастать со скоростью cf- несоответственно, величина 5 равна S Cx +Xj+Cx.j (9 Так как на указанной границе области Gi и X2 (C-ejx, то в силу (9), (2), (41,(81 получаем 5 Г-с2+се-ьадС-а„г-(кУо-о1| х,(10) При достаточно малом и при выполнении неравенства -ft , имеем„ -C +Ct+aoC-agl - (KVo,- . T,e, при величина (напомним Это означает, что вектор состояния догонит убегающую линию переключения. После изменения знака S величина С станет равной нулю, поэтому для , § О, так как по нашему пр1едположению для стационарной линии переключения выполняется условие существования скользящего режима. Приведенные данные показывают, что на нестационарной прямой S возникает скользящий режим. таким образом, при выполнении условий (4), (11) предлагаемый алгоритм адаптации (8) обеспечивает поиск прямой переключения с максимально возможной скоростью затухания движения в скользящем ре)име при
переменных параметрах электродвигателя.
Элементы и блоки устройства работают следующим образом.
Обмотка 19 управления (фиг.З а электродвигателя 1 коммутируется четырьмя ключами 20-23 к выходу модулятора 7 таким образом, что знак действующего значения напряжения на обмотке 19 управления определяется знаком величины u sign5,noступающей на управляющие входы ключей 20-23-первый вход коммутатора 2. Величина действующего значения напряжения, поступающего на обмотку 19 управления с выхода модулятора 7, второй вход коммутатора 2, пропорциональна . Таким образом, алгоритм управления электродвигателем 1 определяется выражением (.4 . Модулятор 7 выполнен, например, по балансной схеме. Действующее значение напряжения на его выходе пропорциональ но V(j|x ( . Конденсатор 24 служит для создания сдвига между фазами напряжений на обмотках 18 и 19 электродвигателя 1, равного 90 эл.град.
Ключи 20 и 23 работают следукядим образом (фиг.З б1.
Диодный мост 25, управляемый тран зистором 26 через транзисторный оптрон 28, открывается (закрывается по сигналу и О ( , поступающему на базу транзистора 27, управляющий вход ключей 20, 23.
Ключи 21 и 22 (фиг.З в) работают в противофазе к ключам 20,23.
Оптроны 28,36 служат для гальванической развязки управляющих и силовых цепей выходного каскада кйммутатор-модулятор-двигатель. Резисторы схем ключей 20-23 служат для создания рабочего режима транзисторов.
Логический блок 11 (фиг 4 а f вычисляет функцию и работает следукицим образом.
На выходах компараторов - операционные усилители 41 и 42, резисторы 47 и 48, диоды 43-46 - из входных сигналов х и S, поступающих на их входы, выделяются сигналы, пропер циональные sign signS , которые после их нормализации на схемах х граничения - резисторы 49 и 50, стабилитроны 51 и 52 - поступают на входы элемента ИСКЛЮЧАЮЩЕЕ ИЛИ 53. Логика работы этого элемента обеспечивает вычисление функции 5(
Логический блок 12 вычисляет функцию5((5|-(х(|н работает следующим образом,
Схемы выделения модуля - операционные усилители 54 и 55, диоды 58-62
резисторы 64-69 вычисляют величины -(х)и|5| из сигналов х и S, поступающих на входы логического блока 12 Далее схемой на основе операционного усилителя 56 осуществляется суммирование сигналов с коэффициентами передачи соответственно 1 и , которые обеспечиваются соотношениями резисторов 70-73. Компаратор на основе операционного усилителя 57, диодов 62 и 63 и резистора 74 и схема ограничения - резистор 75, диод 76 выделяют из выходного сигнала суммирующей .схемы на величину, пропорциональную S((5i - il xj) /
Логический блок 13 (фиг.4 в) вычисляет функцию M,Sg(-dC)oT входного сигнсша ДС и работает следующим образом.
На выходе компаратора на основе операционного усилителя 77, резистора 80, диодов 78 и 79 присутствует сигнал, эквивалентный signdC, а на выходе схемы ограничения - резистор 81, стабилитрон 82 - выделяется величина, соответствующая fdC 1, где fft, определяется напряжением стабилизации Н5 стабилитроне 82.
Сумматор 14 (фиг.5 а) представляет собой трехвходовую суммирующую операционную схему с коэффициентами передачи по первому, второму и третьему входам соответственно CQ, 1 и 1, определяемыми формулой (5).
Интегросумматор 17 (фиг.5 б) вырабатывает величину ЛС в соответствии с формулой (8|. Он состоит из сумматора - операционный усилитель 90, резисторы 95-98 и интегратора операционный усилитель 89, резисторы 91-94, конденсатор 99. Коэффициен cL задается резисторами 91-94 и конденсатором 99.
Компаратор 10 (фиг.5 в) вычисляет функцию и sign S.
Блок 16 вычисления модуля(фиг.5 г вырабатывает величину,пропорциональн Vjjhil.OH состоит из схемы выделения модуля на основе операционного усилителя 104 и усилителя на основе операционного усилителя 105. Клэффициент Vjj задается отношением резисторов 112-111. Схемы блоков и элементов устройства выполнены на основе типовых операционных схем.
Таким образом, введение дополнительных блоков и связей позволяет осуществить адаптацию управления к изменяющимся в процессе работы динамическим параметрам электродвигателя, что дает возможность лспользовать предлагаемое устройство в следящих электроприводах высокой точности и быстродействия.
в
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для моделирования @ -фазного вентильного электродвигателя | 1990 |
|
SU1797133A1 |
| Устройство для воспроизведения зависимости силы трения от нормальной силы,скорости,времени и предварительного смещения | 1985 |
|
SU1312619A1 |
| Устройство для управления вентильным электродвигателем | 1989 |
|
SU1653119A1 |
| Устройство для управления движением транспортного средства | 1984 |
|
SU1262458A1 |
| УСТРОЙСТВО ДЛЯ ОБНАРУЖЕНИЯ ВИТКОВЫХ ЗАМЫКАНИЙ В ЭЛЕКТРИЧЕСКИХ МАШИНАХ И КАТУШКАХ ИНДУКТИВНОСТЕЙ | 2016 |
|
RU2664682C2 |
| Устройство для детектирования фазоманипулированных сигналов | 1982 |
|
SU1042203A1 |
| ПРЕОБРАЗОВАТЕЛЬ ИНЕРЦИАЛЬНОЙ ИНФОРМАЦИИ | 2006 |
|
RU2325620C2 |
| Устройство для моделирования бесконтактного двигателя постоянного тока | 1985 |
|
SU1307468A1 |
| Устройство для моделирования вентильного электродвигателя | 1988 |
|
SU1596357A1 |
| Устройство для управления асинхронным электродвигателем с фазным ротором | 1982 |
|
SU1149363A1 |
1 «1 Sinbft
:« t
Vb/Xi/
n
«kM.
м
а
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Устройство для управления двухфазнымАСиНХРОННыМ элЕКТРОдВигАТЕлЕМ | 1979 |
|
SU824394A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Ивей К.А | |||
| Системы автоматического регулирования на несущей переменного тока | |||
| М., Машиностроение, 1968, с.95. | |||
