(54) ОПОРА ТЯГОВОГО ОРГАНА

| название | год | авторы | номер документа |
|---|---|---|---|
| Опора тягового органа элкоп | 1978 |
|
SU775009A1 |
| Устройство для смазки элементов тягового органа конвейера | 1981 |
|
SU950627A1 |
| СЕЯЛКА ДЛЯ ПОСЕВА СЕМЯН СЛОЖНЫХ ТРАВОСМЕСЕЙ | 1994 |
|
RU2080762C1 |
| ПОГРУЗЧИК ФРОНТАЛЬНЫЙ БЫСТРОМОНТИРУЕМЫЙ | 2012 |
|
RU2515720C2 |
| Сошник | 2021 |
|
RU2787200C2 |
| ПОЧВООБРАБАТЫВАЮЩЕЕ ОРУДИЕ ДЛЯ ПРОТИВОЭРОЗИОННОЙ ОБРАБОТКИ ПОЧВЫ | 2006 |
|
RU2310298C1 |
| ШИРОКОЗАХВАТНЫЙ ПОЧВООБРАБАТЫВАЮЩИЙ АГРЕГАТ | 2016 |
|
RU2630458C1 |
| ВОЕННАЯ ГУСЕНИЧНАЯ МАШИНА | 2007 |
|
RU2404400C2 |
| Машина для подвязки растений к шпалерной проволоке | 1986 |
|
SU1373361A1 |
| ОДНООСНЫЙ ПРИЦЕПНОЙ КАТОК НА ПНЕВМАТИЧЕСКИХШИНАХ | 1970 |
|
SU280518A1 |


I
Изобретение относится к ходовым частям мапшн непрерывного транспорта и может быть использовано в конвейерах с гибким тяговым органом, например с тшастинчатой цепью.
Известна опора тягового органа, включающая (саток с подшипниками и крышками, поворотную стойку и палец с фиксатором ПДОднако констрзп ция опоры не позволяет производить замену катков без простоя конвейеров, а сам процесс замены опор продолжителен по времени и трудоемок.
Наиболее близкой к предлагаемой техническим решением является опора тягового органа, включающая каток, установленный на стойке, раму и крепежное приспособление, выполненное в виде втулки с пазом и пальца с фиксатором ,12.
Однако известная опора имеет недостаточную надежность фиксации.
Цепь изобретения - повышение надежности фиксации опоры.
Указанная цель достигается тем что стойка снабжена стопором с осью и кронштейном для размещения оси стопора, при этом стопор выполнен в виде рычага, свободный конец которого установлен с возможностью взаимодействия с Фиксатором пальца, а кронштейн стойки имеет круговой паз.
Кроме того, стойка выполнена в виде двух рычагов, между которыми расположен каток, а палец закреплен одним концом на раме.
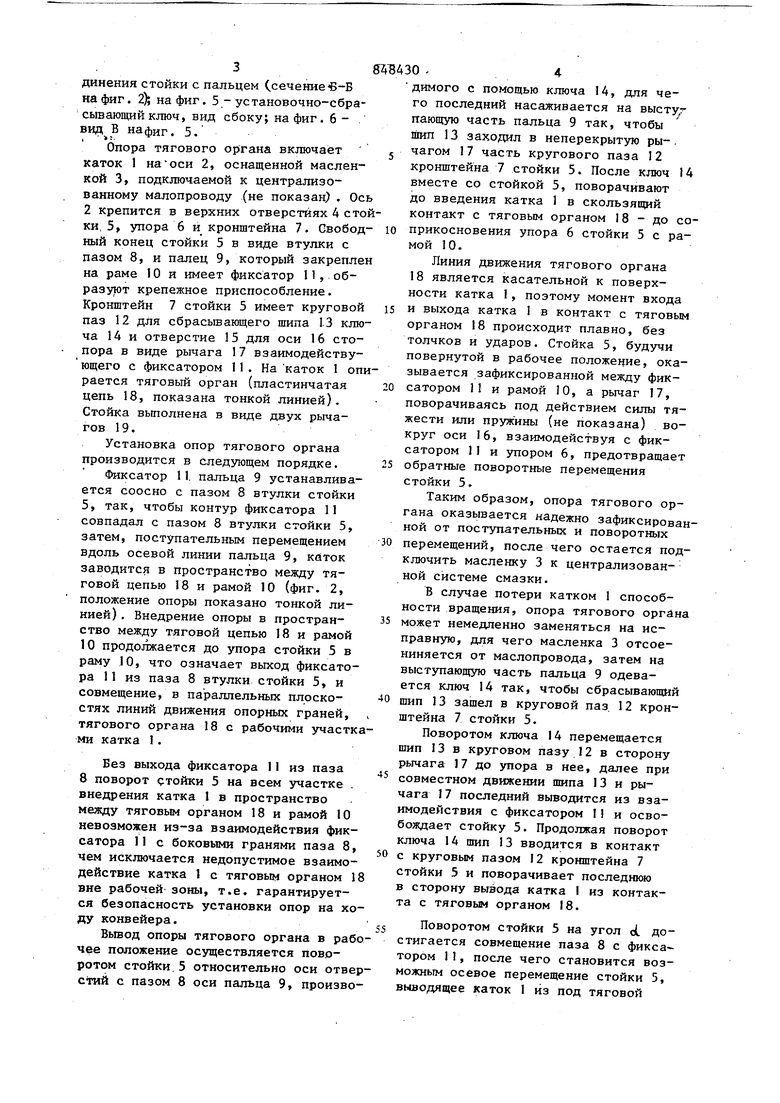
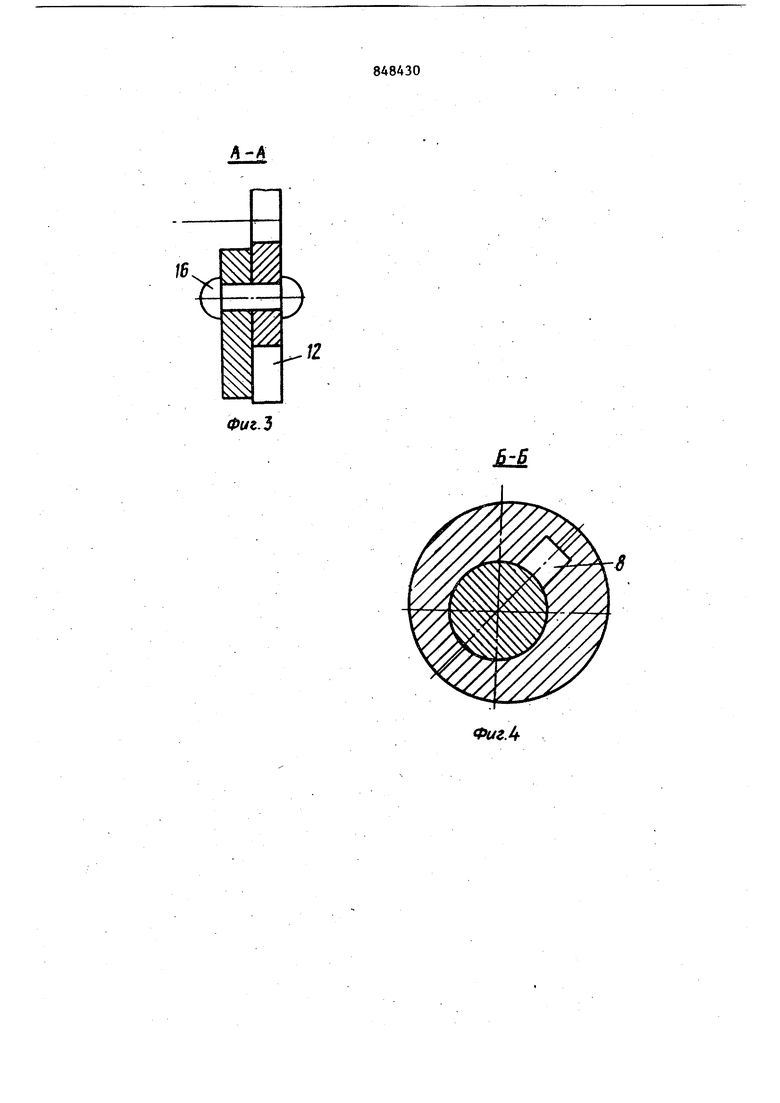
На фиг. 1 изображена опора тягового органа, вид спереди с сечениями по осям катка и пальца; на фиг. 2то же, вид сбоку, тонкой линией показано нерабочее положение опоры тягового органа (во время осевых перемещений) ; на фиг. 3 - сечение по оси крепления собачки и кронштейну стойки (сечение А-А на фиг. I); на фиг. 4 - поперечное сечение соеинения стойки с пальцем (.сечение Б-Б а фиг. 2); на фиг. 5,-установочно-сбраывающий ключ, вид сбоку; на фиг. нафиг. 5.
Опора тягового opiraHa включает 5 каток 1 наОСИ 2, оснащенной масленкой 3, подключаемой к централизованному малопроводу (не показан). Ось 2 крепится в верхних отверстиях 4 стойки, 5, упора 6 и кронштейна 7. Свобод- ю ный конец стойки 5 в виде втулки с пазом 8, и палец 9, который закреплен на раме IО и имеет фиксатор П, образуют крепежное приспособление. Кронштейн 7 стойки 5 имеет круговой is паз 12 для сбрасьюающего шипа 13 ключа 14 и отверстие 15 для оси 16 стопора в виде рычага 17 взаимодействующего с фиксатором 11. На каток 1 опирается тяговый орган (пластинчатая 20 цепь 18, показана тонкой линией). Стойка выполнена в виде двух рычагов 19.
Установка опор тягового органа производится в следзтощем порядке. 25
Фиксатор 11. пальца 9 устанавливается соосно с пазом 8 втулки стойки 5, так, чтобы контур фиксатора 11 совпадал с пазом 8 втулки стойки 5, затем, поступательным перемещением 30 вдоль осевой линии пальца 9, каток заводится в пространство между тяговой цепью 18 и рамой 10 (фиг. 2, положение опоры показано тонкой линией) . Внедрение опоры в простран- 35 ство между тяговой цепью 18 и рамой 10 продолжается до упора стойки 5 в раму 10, что означает выход фиксатора 11 из паза 8 втулки стойки 5, и совмещение, в параллельных плоско- 40 стях линий движения опорных граней, тягового органа 18 с рабочими участками катка 1.
Без выхода фиксатора 11 из паза 5 8 поворот стойки 5 на всем участке . внедрения катка 1 в пространство между тяговым органом 18 и рамой 10 невозможен из-за взаимодействия фиксатора 11 с боковыми гранями паза 8, „ чем исключается недопустимое взаимодействие катка 1 с тяговым органом 18 вне рабочей зоны, т.е. гарантируется безопасность установки опор на ходу конвейера.,5
Вьшод опоры тягового органа в рабочее положение осуществляется поворотом стойки.5 относительно оси отверстий с пазом 8 оси пальца 9, производимого с помощью ключа 14, для чего последний насаживается на выступающую часть пальца 9 так, чтобы шип 13 заходил в неперекрытую ры-. чагом 17 часть кругового паза 12 кронштейна 7 стойки 5. После ключ 14 вместе со стойкой 5, поворачивают до введения катка 1 в скользящий контакт с тяговым органом 18 - до соприкосновения упора 6 стойки 5 с рамой 10.
Линия движения тягового органа 18 является касательной к поверхности катка 1, поэтому момент входа и выхода катка 1 в контакт с тяговым органом 18 происходит плавно, без толчков и ударов. Стойка 5, будучи повернутой в рабочее положение, оказывается зафиксированной между фиксатором 11 и рамой 10, а рычаг 17, поворачиваясь под действием силы тяжести или пружины (не показана) вокруг оси 16, взаимодействуя с фиксатором 1I и упором 6, предотвращает обратные поворотные перемещения стойки 5.
Таким образом, опора тягового органа оказывается надежно зафиксированой от поступательных и поворотных перемещений, после чего остается подключить масленку 3 к централизованной системе смазки.
В случае потери катком 1 способности вращения, опора тягового орган может немедленно заменяться на исправную, для чего масленка 3 отсоениняется от маслопровода, затем на выступающую часть пальца 9 одевается ключ 14 так, чтобы сбрасывающий шип 13 зашел в круговой паз 12 кронштейна 7 стойки 5.
Поворотом ключа I4 перемещается шип 13 в круговом пазу I2 в сторону рьмага 17 до в нее, далее при совместном движении шипа 13 и рычага J 7 последний выводится из взаимодействия с фиксатором 1 и освобождает стойку 5. Продолжая поворот ключа 14 шип I3 вводится в контакт с круговым пазом 12 кронштейна 7 стойки 5 и поворачивает последнюю в сторону вывода катка I из контакта с тяговым органом 18.
Поворотом стойки 5 на угол о1 достигается совмещение паза 8 с фиксатором 11, после чего становится возможньтм осевое перемещение стойки 5, выводящее каток 1 из под тяговой ц«пи 18 и позволяющее снять опору с пальца 9. Таким образом, снйтие опоры со стопора производится автоматически - одним движением ключа 14, всле ствие чего обеспечивается надежная фиксация заменяемой опоры тягового органа. Предварительный расчет экономической эффективности показьгоает возможность получения экономии средств в 20-30 тыс, руб. в год по одному объекту внедрения опор тягового органа с устройством для автоматической фиксации. Формула изобретения 1. Опора тягового органа, включающая каток, установленный на стой ке, раму и крепежное приспособление вьтолненное в виде втулки с пазом 0 6 и пальца с фиксатором, отличающаяся тем, что, с целью повышения надежности фиксации опоры, стойка снабжена стопором с осью и кронштейном для размещейия оси стопора, приэтом стопор вьшолнен в виде рычага, свободный конце которого установлен с возможностью взаимодействия с фиксатором пальца, а I кронштейн стойки имеет круговой йаэ. 2. Опора по п. 1, отличающаяся тем,что стойка выполнена в виде двух рычагов, между которыми расположен каток, а палец закреплен одним концом на раме. Источники информации, принятые во внимание при экспертизе 1 . Патент США. № 269701 , кл. 198-192, -опублик. 1954. 2. Авторское свидетельство СССР по заявке № 2595822, кл. В 65 G 21/06, 1978 (прототип).
/б
12
Фиг-Ъ
