(54) ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ СЛЕДЯЩИЙ ПРИВОД
| название | год | авторы | номер документа |
|---|---|---|---|
| Электрогидравлический следящий привод | 1980 |
|
SU928093A1 |
| Электрогидравлический следящий привод | 1984 |
|
SU1195076A1 |
| Электрогидравлический следящий привод | 1985 |
|
SU1250740A1 |
| Электрогидравлический следящий привод | 1987 |
|
SU1530823A1 |
| Электрогидравлический следящий привод | 1981 |
|
SU1028903A2 |
| Электрогидравлический следящий привод | 1986 |
|
SU1399521A2 |
| Электрогидравлический следящий привод | 1987 |
|
SU1432280A2 |
| Электрогидравлический следящий привод робота | 1990 |
|
SU1740806A1 |
| Электрогидравлический следящий привод | 1986 |
|
SU1346858A1 |
| Электрогидравлический следящий привод робота | 1988 |
|
SU1557371A1 |
1
Изобретение относится к гидроавтоматике и может быть использовано в следящих системах проладшленных роботов и манипуляторов
Известен электрогидравлический следящий привод, содержащий насос с приводом регулирующего органа, гидродвигатель, связанный гидролиниягуш с насосом, задающее устройство, связ нное с приводом регулирующего орrarta через сумматор, датчик положения вала гидродвигателя, подключенный к вычитающему входу сумматора, датчик перепада давлений в гидролиниях и блок деления, одним из входов соединенный с датчиком перепада, а выходом - с приводом регулирующего ;
органа til
Недостатками известного привода являются его низкая точность и УСТОЙЧИВОСТЬ при обработке быстроизменяющихся входных воздействий с объектами, моменты, инерции которых изменяются в широких пределах.
Цель изобретения - повышение точности и устойчивости.
Указанная цель достигается тем, что привод снабжен датчиками момента и скорости, блоком умножения, интегратором и дополнительным сумматором, при этом датчики момента и i скорости установлены на валу гидродвигателя, датчик скорости подключен ко второму входу блока деления, к выходу сумматора - блок умножения, связанный через интегратор с выходом блока деления, причем последний соединен с датчиком перепада через дополнительный сумматор, к вычитаю10чему входу которого подключен датчик момента.
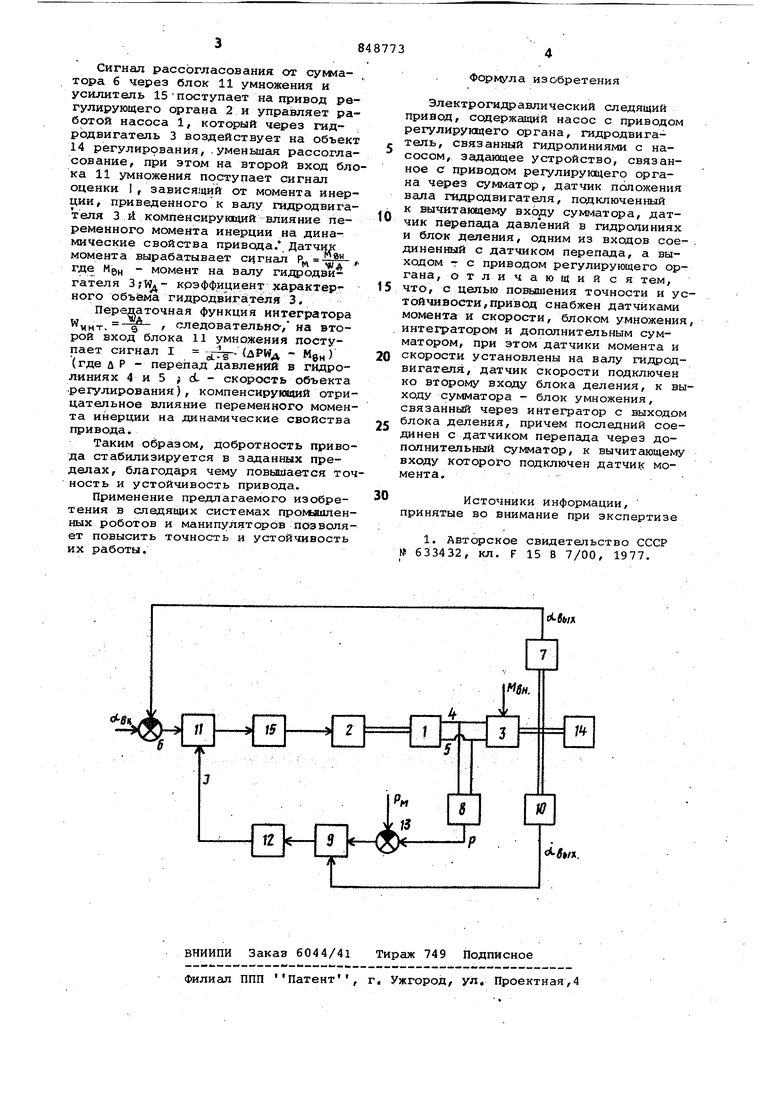
На чертеже схематически изображен электрогидравлический следящий привод.
Привод ссадержит насос 1 с во15дом регулиругацего органа 2, гидродвигатель 3, связанный ги1«)олиниями 4 и 5 с насосом, задающее устройство (не показано),, сумматор 6, датчик 7 положения вала гидродвигате20ля 3, датчик 8 перепада давлений, блок.9 деления, датчик 10 .скорости, блок 11 умножения, интегратор 12, дополнительный сумматор 13, объект 14 регулирования, усилитель 15 и дат25чик момента (не показан), подключенный к вычитающему входу дополнительного сумматора 13., ..
Электрогидравлический следящий привод рабсягает следующим образом.
30 Сигнал рассогласования от сумлатора б через блок 11 умножения и усилитель 15поступает на привод регулирующего органа 2 и управляет работой насоса 1, который через гидродвигатель 3 воздействует на объект 14 регулирования,.уменьшая рассогласование, при этом на второй вход бло ка 11 умножения поступает сигнал оценки 1, зависящий от момента инерции, приведенного к валу гидродвигателя 3 и компенсируквдий влияние переменного момента инерции на динамические свойства привода/ Датчик момента вырабатывает сигнал Р|л «ь где Мцц - момент на валу гидфодви- гателя крэффициент характерного объ(вма гидродвигг1Тёяя 3. Перепаточная функция интегратора . 9 f следовательно-/ на второй вход блока 11 умножения поступает сигнал I (дРИд - MgH ) (где л Р - перепад давлений в гидролиниях 4 и 5 ; dL - скорость объекта регулирования), компенсирующий отрицательное влияние переменного момента инерции на динамические свойства привода. Таким образом, добротность привода стабилизируется в заданных пределах, благодаря чему повышается точ ность и устойчивость привода. Применение предлагаемого изобретения в следящих системах про ллйленных роботов и манипуляторсзв позволяет повысить точность и устойчивость их работы. Форкьла изобретения Электрогидравлический следящий привод, содержащий насос с приводом регулирующего органа, гидродвигатель, связанный гидролиниями с насосом, задающее устройство, связанное с приводом регулирунхцего органа через сумматор, датчик положения вала гидродвигателя, подключенный к вычитающему входу сумматора, датчик перепада давлений в гидродиниях и блок деления, одним из входов сое- , диненный с датчиком перепада, а выходом т с приводом регулирующего органа, отличающийся тем, что, с целью повышения точности и устойчивости, привод снабжен датчиками момента и скорости, блоком умножения, интегратором и дополнительным сумматором, при этом датчики момента и скорости установлены на валу гидродвигателя, датчик скорости подключен ко второму входу блока деления, к выходу сумматора - блок умножения, связанный через интегратор с выходом блока деления, причем последний соединен с датчиком перепала через дополнительный сумматор, к вычитающему входу которого подключен датчик момента. Источники информации, принятые во внимание при экспертизе 1. Авторское свидетельство СССР № 633432, кл. F 15 В 7/00, 1977.
