(ЗА) ФРИКЦИОННЫЙ РОЛИКО-ЛЕНТОЧНЫЙ МЕХАНИЗМ
| название | год | авторы | номер документа |
|---|---|---|---|
| РЕЕЧНАЯ ПЕРЕДАЧА | 2003 |
|
RU2230244C1 |
| ВАРИАТОР ГЛАДКИХ | 1990 |
|
SU1816065A1 |
| Способ зарядки пленки в лентопротяжный тракт | 1986 |
|
SU1448330A1 |
| УСТРОЙСТВО ДЛЯ УЛЬТРАЗВУКОВОГО КОНТРОЛЯ СВАРНЫХ ШВОВ ТРУБ | 1989 |
|
SU1623421A1 |
| Устройство для шаговой подачи полосового и ленточного материала в зону обработки | 1991 |
|
SU1784375A1 |
| Муфта сцепления с бесконечным гибким замкнутым фрикционным элементом в составе одномуфтового и двухмуфтового приводов | 2016 |
|
RU2634061C1 |
| ВАРИАТОР | 1997 |
|
RU2151934C1 |
| ФРИКЦИОННЫЙ ВАРИАТОР | 1995 |
|
RU2104429C1 |
| ФРИКЦИОННЫЙ ВАРИАТОР | 1996 |
|
RU2112169C1 |
| Роликовый механизм для передачи вращения | 1990 |
|
SU1728549A1 |
1
Изобретение относится к машиностроению и может быть использовано в мощньпс и высокоточных приводах для преобразования вращения в поступательное перемещение ведомого элемента.
Наиболее близким к предлагаемому является фрикционный ролико-ленточный механизм, содержащий направляющую, ведомый элемент, установленный на направляющей с возможностью возвратно-поступательного перемещения, два ролика и гибкое звено, которое, огибая ролики, принимает S-образную форму fQНедостаток известного механизма заключается в низкой нагрузочной способности и точности вследствие возможности проскальзывания между роликом и гибким звеном.
Цель изобретения - повьшение нагрузочной способности и точности механизма путем исключения проскальзывания между роликом и гибким звеном
Указанная цель достигается тем, что один из роликов выполнен в виде рамки, внутри которой на сторонах, параллельных направляющей, соответственно закрепленным концы гибкого звена , последнееустановлено с предварительным натяжением, а угол, образованный линией проходящей через центры роликов, и перпендикуляром к направляющей, выбран из условия
2arctgf arctgfd - f ) где оС- угол, образованный линией,
проходящей через центры ро- г ликов, и перпендикуляром к напр ав лякяцей; If - угол охвата роликов гнбккм
звеном;
f - козффициент трения скольжения между приводным роликом и гибким звеном.
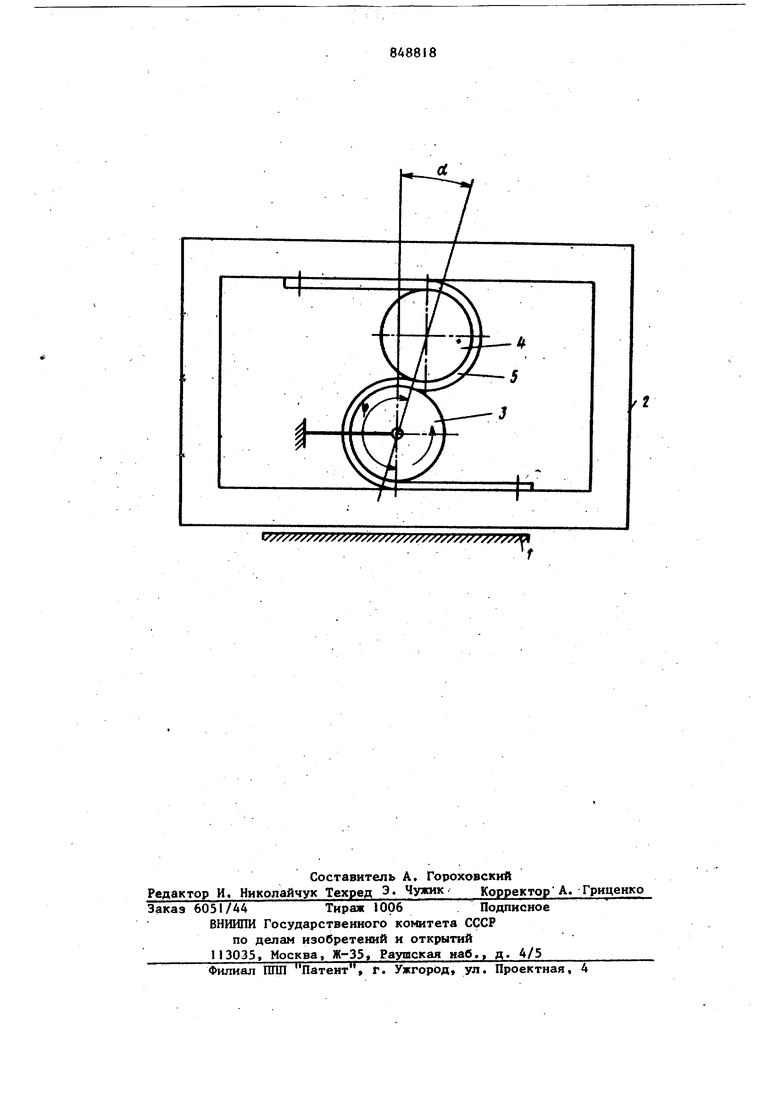
На чертеже изображена кинематическая схема предлагаемого механизма.
Механизм содержит направляющую 1, на которой установлены с возможностью 3 возвратно-поступательного перемейчения ведомый элемент в виде рамки 2 и два ролика 3 и 4, расположенные внут ри рамки 2, причем ролик 3 -приводной и установлен с возможностью вращения, и гибкое звено 5, которое, ог бая ролики, принимает S-образную фор му и концы которого закреплены соответственно на сторонах рамки 2, параллельных направляющей 1. Гибкое звено 5 установлено с предварительным натяжением. Угол, образованный линией, проходящей через центры роликов 3 и 4, и перпендикуляром к направляющей выбирается из условия 2an;:tgf оС 2arctgf (1+ ), где оС- угол, образованный линией, проходящей через центры роликов 3 и 4, и перпендикуляром к направлянщей 1; f - угол охвата роликов 3 и 4 гибким звеном 5; f - коэффициент трения скольжени между приводным роликом и ги КИМ звеном. Таким образом, если ,l и 3,5 рад, то угол с6 должен находитьс в пределах от П ЗОдО 28 . Механизм работает следующим образом. При вращении приводного ролй1са 3 рамка 2 поступательно перемещается по направляющей 1, причем гибкое звено 5 и ролик 4 создают эффект, согласно которому любая внешняя нагрузка сама вызьшает нормальные давления и силы трения между гибким зве ном 5 и приводным роликом 3, заведом обеспечивающие работу механизма без Проскальзывания. Предлагаемый механизм может быть использован в малогабаритных мощных и высокоточных приводах для преобра8зования вращения в поступательное перемещение ведомого элемента, например в автооператорах, манипуляторах, приводах станков. Формула изобретения Фрикционный ролико-ленточный механизм, содержащий направляющую, ведомый элемент, .установленный на направляющей с возможностью возвратнопоступательного перемещения, два ролика, гибкое звено, которое, огибая ролики, принимает S-образную форму, отличающийся тем, что, с целью повыпения нагрузочной способности и точности механизма путем исключения проскальзывания между роликом и гибким звеном, один из роликов выполнен в виде рамки, внутри которой на сторонах, параллельных направляющей, соответственно закреплены концы, гибкого звена, последнее установлено с предварительным натяжением, а угол, образованный линией, проходящей через центры роликовой перпендикуляром к направляющ1ей., выбран из условия 2arctgf icCi2arctgf(1 + Г) , где об- угол, образованный линией, проходящей через центры роликов, и перпендикуляром к направляющей;f - угол охвата роликов гибким звеном; f - коэффициент трения скольжемия между приводным роликом и гибким звеном. Источники информации, принятые во внимание при экспертизе 1. Патент США № 3828615, кл. F 16 Н 27/02, 1974 (прототип) .
