Изобретение относится к области механических передач и может быть использовано в качестве элемента трансмиссии в технологическом оборудовании, транспортных, грузоподъемных и сельскохозяйственных машинах.
Известны фрикционные вариаторы [1 и 2], содержащие фрикционные звенья в виде тел вращения с криволинейными образующими, пересекающимися осями вращения, и контактирующее с ними промежуточное фрикционное звено в виде кольца.
Недостатками упомянутых вариаторов являются ограниченная нагрузочная способность вследствие связи между звеньями через одно пятно фрикционного контакта и существенные потери энергии из-за наличия геометрического скольжения.
Известен фрикционный вариатор [3], содержащий взаимодействующие попарно фрикционные звенья с пересекающимися осями вращения, причем в каждой из пар одно из звеньев имеет сферическую рабочую поверхность с центром в точке пересечения осей вращения, второе выполнено в виде обоймы с двумя кинематически связанными между собой роликами, оси которых расположены в плоскости, проходящей через центр сферической поверхности и перпендикулярной оси вращения обоймы, а приводные валы имеют механическую связь с фрикционными звеньями, имеющими сферические рабочие поверхности.
Недостатком этого вариатора является ограниченные нагрузочная способность и надежность вследствие того, что фрикционные звенья составляют кинематическую цепь, в которой связь между фрикционными звеньями осуществляется через одно пятно фрикционного контакта сферической рабочей поверхности с роликом.
В качестве прототипа принят фрикционный вариатор [4], содержащий корпус, приводные валы, кинематически связанные с ними и взаимодействующие попарно фрикционные звенья с пересекающимися осями вращения, установленные с возможностью изменения угла их пересечения, причем одно из звеньев в каждой паре имеет сферическую рабочую поверхность с центром в точке пересечения осей вращения, второе выполнено в виде обоймы с роликами, которые контактируют со сферической поверхностью и оси которых расположены в плоскости, проходящей через центр сферической поверхности и перпендикулярной оси вращения обоймы, а ролики установлены в подшипниках нажимных устройств.
Недостатком этого вариатора является ограниченная нагрузочная способность и низкий КПД вследствие того, что передача необходимой для фрикционного взаимодействия роликов со сферической поверхностью нормальной силы (в 10 - 20 раз превышающей тангенциальную фрикционную силу) осуществляется через подшипники роликов, что ограничивает ее величину и сопровождается потерями мощности.
Принципиальную роль при этом играет компонента фрикционной силы, необходимая для придания углового ускорения роликам, имеющая место даже при равномерном вращении приводных валов вследствие синусоидальной зависимости угловой скорости ролика от его положения относительно плоскости осей вращения фрикционных звеньев, которая с увеличением размеров роликов, неизбежном при увеличении грузоподъемности подшипников, прогрессивно увеличиваается, соответственно уменьшая полезную компоненту тангенциальной фрикционной силы.
Сущностью изобретения является повышение нагрузочной способности вариатора и уменьшение потерь мощности путем создания нормальной силы в зонах фрикционного взаимодействия без нагружения подшипников роликов.
Указанный эффект достигается тем, что при каждой паре фрикционных звеньев вариатор содержит дополнительное звено со сферической рабочей поверхностью, концентричной сферической поверхности фрикционного звена, не имеющее физической оси и кинематической связи с приводными валами, а также взаимодействующие с ним центрирующие опоры, причем все ролики обоймы контактируют с обеими сферическими поверхностями, а их оси установлены с возможностью радиального по отношению к обойме перемещения в их общей плоскости.
Для уменьшения износа контактирующих звеньев и потерь мощности при частичных нагрузках путем обеспечения зависимости нормальной силы в зонах фрикционного взаимодействия от величины момента на обойме ролики могут быть установлены с возможностью поворота осей в их общей плоскости, а рабочая поверхность роликов в меридиональном сечении может быть выполнена либо меньшей кривизны, чем в экваториальном сечении, либо иметь кривизну переменной величины.
Для обеспечения равномерного распределения нагрузки между роликами при пониженных требованиях к точности изготовления одно, или оба звена со сферическими рабочими поверхностями могут быть выполнены в виде упругих оболочек.
Для управления нагрузочной способностью вариатора дополнительное звено может быть выполнено в виде деформируемой герметичной оболочки, заключающей газ под давлением, а внутренняя полость вариатора изолирована от окружающей среды и соединена с регулируемым источником жидкости или газа.
Для удобства встраивания вариатора в трансмиссию одно из фрикционных звеньев в каждой их паре может быть установлено в подшипниках поворотного устройства, ось поворота которого проходит через центр сферических поверхностей и совпадает с осью приводного вала, имеющего кинематическую связь с этим фрикционным звеном.
Для реализации зависимости передаточного отношения вариатора от нагрузки он может содержать механизм поворота поворотного устройства с чувствительным элементом, кинематически связанным с этим поворотным устройством.
Для минимизации поперечного сечения вариатора ось поворота поворотного устройства может составлять с осью вращения установленного в нем фрикционного звена угол, равный половине максимально возможного угла между осями вращения фрикционных звеньев.
Для увеличения диапазона изменения передаточного отношения вариатор может быть выполнен по планетарной схеме. При этом фрикционные звенья вариатора устанавливаются в подшипниках кинематически связанного с приводным валом вращающегося корпуса, ось вращения которого проходит центры сферических поверхностей.
Использование изобретения позволит на порядок по сравнению с прототипом повысить нагрузочную способность вариатора и по этому параметру фрикционный вариатор не будет уступать гидродинамической передаче при существенно более высоком КПД.
На фиг. 1-4 иллюстрируется принцип действия фрикционного вариатора и варианты исполнения.
Заявляемый фрикционный вариатор (фиг. 1) содержит корпус 1, приводные валы 2 и 3, фрикционное звено с осью вращения X и сферической рабочей поверхностью 4, фрикционное звено, выполненное в виде обоймы 5 с осью вращения X1 и роликами 6, дополнительное звено со сферической рабочей поверхностью 7 и центрирующие опоры 8. Оси вращения X и X1 фрикционных звеньев пересекаются под углом α1 в точке О, являющейся центром сферических поверхностей 4 и 7. Оси роликов 6 расположены в плоскости π, походящей через точку О и перпендикулярной оси X1. Обойма 5 установлена с возможностью изменения угла α1. Дополнительное звено 7 не имеет физической оси и кинематической связи с приводными валами. Центрирующие опоры 8 (это могут быть как опоры скольжения, так и опоры качения) вместе с роликами 6 удерживают дополнительное звено в положении, при котором центр его рабочей поверхности 7 находится в точке О. Все ролики 6 контактируют со сферическими поверхностями 4 и 7, а их оси установлены в обойме 5 с возможностью радиального перемещения в плоскости π .
Вариатор работает следующим образом.
Приводной вал 2 вместе с установленным на нем фрикционным звеном со сферической рабочей поверхностью 4 вращается вокруг оси X с угловой скоростью ω. Можно показать, что при отсутствии проскальзывания в местах контакта роликов 6 с поверхностью 4 обойма 5, установленная на валу 3, будет вращаться вокруг оси X1 с угловой скоростью ω1= ω•cosα1. Таким образом, будет реализована кинематическая связь между валами 2 и 3 с передаточным отношением  , зависящим от величины угла пересечения осей X и X1.
, зависящим от величины угла пересечения осей X и X1.
При этом ролики 6 будут вращаться вокруг своих осей с угловыми скоростями  , где ϕ - угол между плоскостью XОX1 и плоскостью вращения данного ролика, а дополнительное звено 7 при отсутствии проскальзывания в местах контакта с роликами 6 будет вращаться вокруг оси X2, лежащей в плоскости XOX1, с угловой скоростью
, где ϕ - угол между плоскостью XОX1 и плоскостью вращения данного ролика, а дополнительное звено 7 при отсутствии проскальзывания в местах контакта с роликами 6 будет вращаться вокруг оси X2, лежащей в плоскости XOX1, с угловой скоростью  , где
, где  .
.
Нормальная сила, необходимая для создания тангенциальной фрикционной силы, создается установкой роликов 6 между поверхностями 4 и 7 с предварительным натягом и не нагружает подшипники роликов, которые в данном случае воспринимают полезную осевую и радиальную инерционную силы, которые составляют менее 10% от нормальной силы, что вместе с практически полностью разгруженными опорами валов 2 и 3 позволяет получить высокий КПД вариатора.
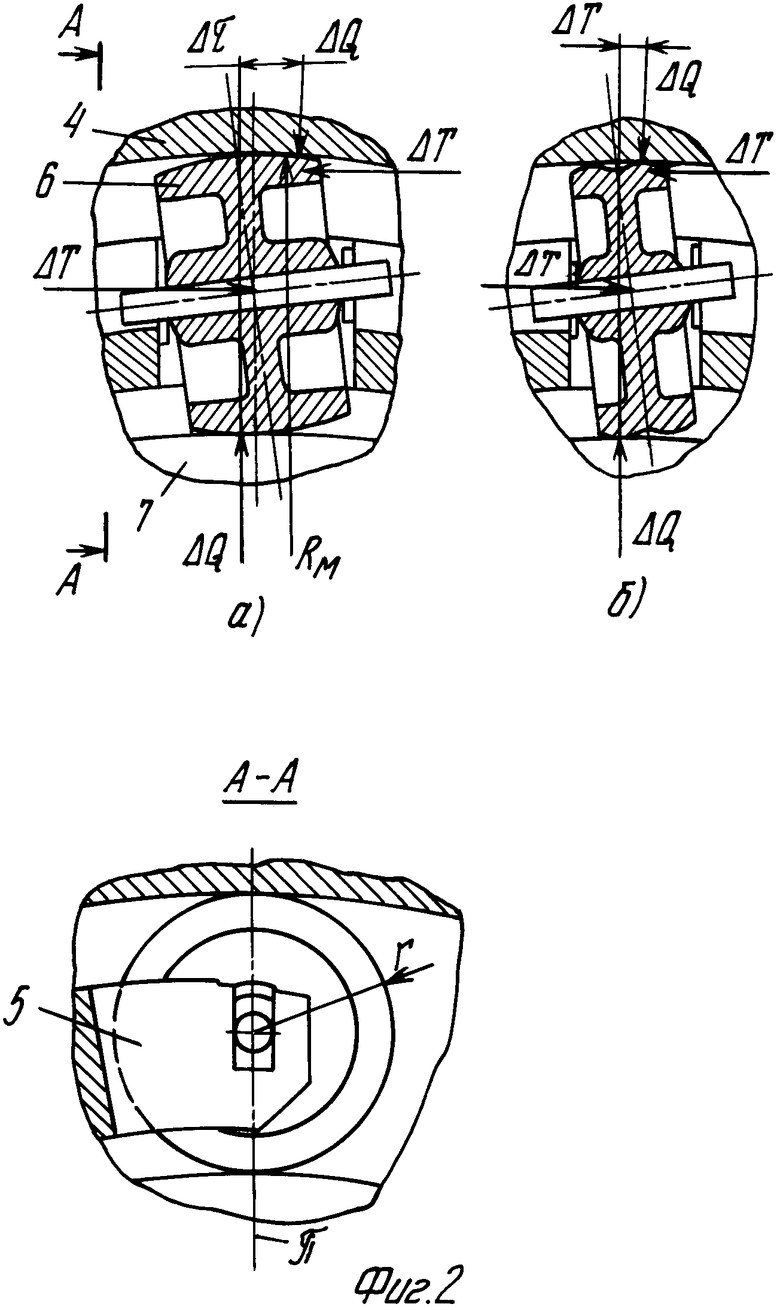
Ролики 6 (фиг. 2) могут быть установлены в обойме 5 с возможностью поворота их осей в плоскости π. При этом кривизна рабочих поверхностей роликов в меридиональном сечении выполняется либо меньшей величины, чем в экваториальном (1/R<1/r, фиг. 2, а), либо имеет переменную величину (фиг. 2, б). В этом случае ролики можно устанавливать между поверхностями 4 и 7 с минимальным предварительным натягом, обеспечивающим минимальную фрикционную силу; при увеличении нагрузки ролики повернутся так, что их оси вращения останутся в плоскости π , а на рабочие поверхности начнут действовать дополнительные нормальные силы ΔQ , позволяющие увеличить фрикционную силу на величину ΔQ•E (где f - коэффициент трения); ролики же займут положение, при котором ΔQ = ΔT•r (где ΔT - увеличение фрикционной силы). Эта конструкция позволяет уменьшить трение и напряжения во взаимодействующих звеньях при частичных нагрузках, что увеличивает КПД вариатора на этих режимах и уменьшает износ рабочих звеньев.
На фиг. 3 показан вариатор, у которого обойма 1 (фиг. 3, а) или фрикционное звено со сферической рабочей поверхностью 2 (фиг. 3, б) установлены в подшипниках поворотного устройства 3, выполненного, например, в виде люльки (фиг. 3, а) или кривошипа (фиг. 3, б), ось поворота которых проходит через центр сферических поверхностей О и совпадает с осью приводного вала 4, кинематически связанного, например, зубчатой передачей Z1-Z2 с обоймой 1 (фиг. 3, а), или звеном 2 (фиг. 3, б). При этом изменение передаточного отношения  достигается поворотом поворотного устройства без изменения пространственного положения приводных валов. С точки зрения уменьшения поперечного сечения вариатора рациональнее выполнение его по схеме (фиг.3,б). Здесь в положении кривошипа, изображенном на фиг. 3,б,
достигается поворотом поворотного устройства без изменения пространственного положения приводных валов. С точки зрения уменьшения поперечного сечения вариатора рациональнее выполнение его по схеме (фиг.3,б). Здесь в положении кривошипа, изображенном на фиг. 3,б,  , а при повороте кривошипа на 180, i = imin = Z1/Z2.
, а при повороте кривошипа на 180, i = imin = Z1/Z2.
На фиг. 4 показан вариатор, выполненный по планетарной схеме. Приводной вал 1 жестко связан с вращающимся корпусом 2, ось вращения которого проходит через центр О сферических поверхностей. В подшипниках корпуса 2 установлено фрикционное звено 3 со сферической рабочей поверхностью, на валу которого установлена шестерня Z2, находящаяся в зацеплении с шестерней Z1, жестко связанной с неподвижным корпусом 4. Обойма 5 установлена в подшипниках кривошипа 6 и зубчатой парой Z3-Z4 связана с приводным валом 7. Поворот кривошипа 6 относительно корпуса 2 без остановки приводных валов осуществляется механизмом поворота, содержащем, например, обойму 8 и гайку 9, установленные с возможностью осевого перемещения в корпусах 4 и 2 соответственно, и винт 10, жестко связанный с кривошипом 6. При введении в цепь управления упругого элемента может быть реализована зависимость передаточного отношения вариатора от нагрузки.
Противовесы 11 и 12 служит для балансировки вращающихся масс.
Вариатор реализует передаточное отношение
| название | год | авторы | номер документа |
|---|---|---|---|
| УСИЛИТЕЛЬ УПРАВЛЯЮЩЕГО ВОЗДЕЙСТВИЯ | 2008 |
|
RU2389924C2 |
| ЖИДКОСТНО-КОЛЬЦЕВАЯ МАШИНА | 2004 |
|
RU2271453C2 |
| ДИСКОВЫЙ ПЛАНЕТАРНЫЙ ВАРИАТОР | 2008 |
|
RU2384774C1 |
| Многопоточный фрикционный редуктор | 1988 |
|
SU1714257A1 |
| ВАРИАТОР | 1997 |
|
RU2151934C1 |
| ПРИВОД С ЗАМКНУТОЙ КИНЕМАТИЧЕСКОЙ ЦЕПЬЮ | 1995 |
|
RU2105912C1 |
| ДИСКОВЫЙ ПЛАНЕТАРНЫЙ ВАРИАТОР | 2008 |
|
RU2391586C2 |
| ЮВЕЛИРНОЕ ИЗДЕЛИЕ | 1996 |
|
RU2114543C1 |
| Станок для шлифования и полирования оптических деталей | 1987 |
|
SU1449327A1 |
| ДИСКОВЫЙ ПЛАНЕТАРНЫЙ ВАРИАТОР | 2008 |
|
RU2357139C1 |


Изобретение относится к области механических передач и может быть использован в качестве элемента трансмиссии в технологическом оборудовании, транспортных, грузоподъемных и сельскохозяйственных машинах. Сущность изобретения: вариатор содержит корпус, приводные валы и кинематически связанные с ними и взаимодействующие попарно фрикционные звенья с пересекающимися осями вращения, установленные с возможностью изменения угла их пересечения, причем одно из звеньев в каждой паре имеет сферическую рабочую поверхность с центром в точке пересечения осей вращения, а второе выполнено в виде обоймы с роликами, которые контактируют со сферической поверхностью и оси которых расположены в плоскости, проходящей через центр сферической поверхности и перпендикулярной оси вращения обоймы. Положительный эффект достигается тем, что при каждой паре фрикционных звеньев вариатор содержит дополнительное звено со сферической рабочей поверхностью, концентричной сферической поверхности фрикционного звена, не имеющее физической оси и кинематической связи с приводными валами, и взаимодействующие с ним центрирующие опоры, причем все ролики обоймы контактируют с обеими сферическими поверхностями, а их оси установлены с возможностью радиального по отношению к обойме перемещения в их общей плоскости. Направлено на уменьшение износа контактирующих звеньев. 7 з.п. ф-лы, 4 ил.
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| SU, авторское свидетельство, 1414980, кл | |||
| Устройство для электрической сигнализации | 1918 |
|
SU16A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| SU, авторское свидетельство, 1484996, кл | |||
| Устройство для электрической сигнализации | 1918 |
|
SU16A1 |
| Переносная печь для варки пищи и отопления в окопах, походных помещениях и т.п. | 1921 |
|
SU3A1 |
| SU, авторское свидетельство, 1753109, кл | |||
| Устройство для электрической сигнализации | 1918 |
|
SU16A1 |
| Очаг для массовой варки пищи, выпечки хлеба и кипячения воды | 1921 |
|
SU4A1 |
| SU, авторское свидетельство, 217163, кл | |||
| Устройство для электрической сигнализации | 1918 |
|
SU16A1 |
