(54) ПРЕОБРАЗОВАТЕЛЬ КООРДИНАТ
| название | год | авторы | номер документа |
|---|---|---|---|
| Система для программного управления | 1985 |
|
SU1251033A1 |
| Устройство для определения локальных экстремумов | 1983 |
|
SU1164694A1 |
| Преобразователь координат | 1978 |
|
SU708275A1 |
| Преобразователь перемещения в код | 1980 |
|
SU934522A2 |
| Устройство для сортировки информации | 1984 |
|
SU1196849A1 |
| УСТРОЙСТВО ДЛЯ ДИСКРЕТНОЙ ОБРАБОТКИ СИГНАЛОВ | 1998 |
|
RU2141737C1 |
| УСТРОЙСТВО ДЛЯ ИМИТАЦИИ РАДИОЛОКАЦИОННОГО ИЗОБРАЖЕНИЯ МЕСТНОСТИ | 1988 |
|
SU1841035A1 |
| Устройство для отображения радиолокационной информации на экране электронно-лучевой трубки | 1989 |
|
SU1691880A1 |
| Устройство для измерения положения оси привариваемого ребра к листу из немагнитного материала | 1986 |
|
SU1540978A1 |
| Устройство для тестового контроля логических узлов | 1991 |
|
SU1837297A1 |
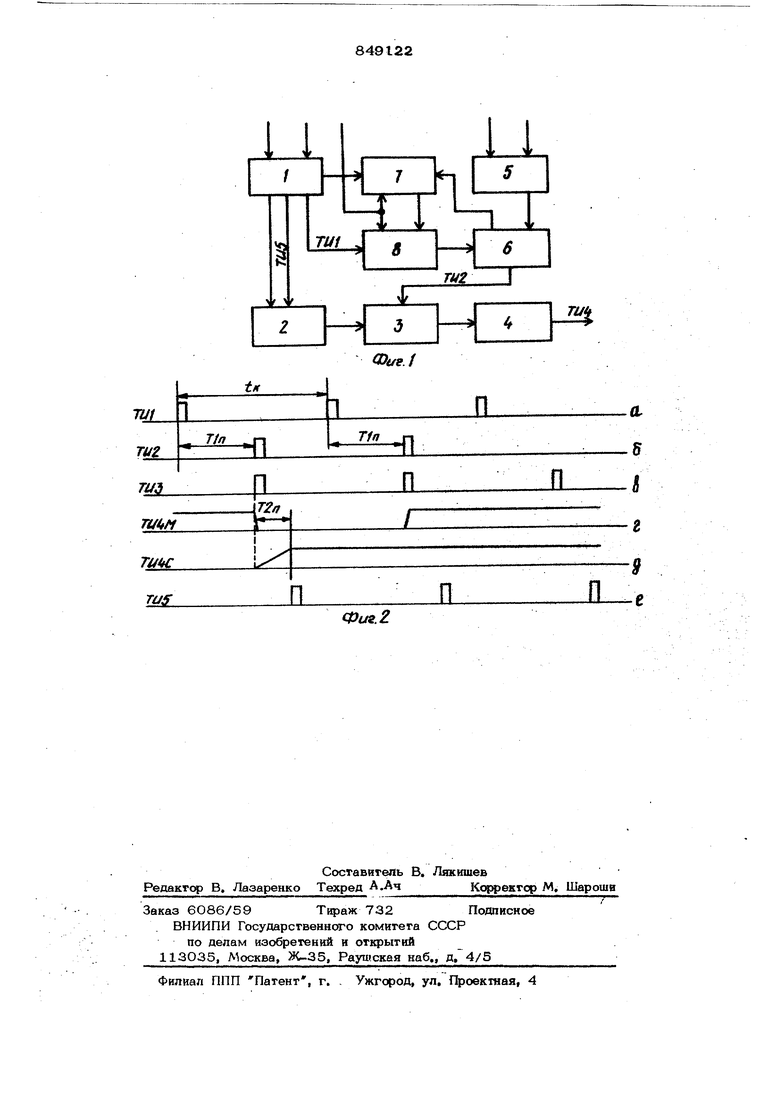
Изофетение огносигся к обработке mrформации и можег быть кспольаовано в усгр Асгвах офабогки и огображения раэв ргываемой во времени информации, напсфвмер -радвопокасишной информации. Известен ореофазовагель координат, содержаший первый регистр, последовател но соедкненные датчик текущей далыюсти каррекгар высоты элемент ИЛИ и счетчик, выход которого является выходом преобразователя координат, второй вход корректора высоты подключен к второму выходу датчика текущей дальности, вый и второй входы которсило, а также первый и второй входьг первого регистра являются входами преобразователя коорди нат l. Однако точность преобразования координат такого устрсйства невысока. Цель изобретения - повышение точности преобразования координат. Цель достигается тем, что в преобразо ватель координат, содерх ащий первый регистр, последоветельно соединенные датчик текущей дальности, кфректор высоты, элемент ИЛИ в счетчнк, выход которого является выходом 1фео(азователя координат,, второй вход корректера высоты подключен к втсфому выходу датчюса текущей дельно ста, первь4Й и BTqjoft входы которого, а также первый и второй входы первого регистра 51ВЛЯ1С1ТСЯ Ехооамв 1феобразователя коордеват, введены аоследовательно соединенные сумматор, второй в третий реrBcit u, {фячем третей в «{егвертый выходы датчика текуш дальности подключены к ва(.оау второго и третьего регистра соответсгве«шо, выход первого регис1ра и выход iperbero регистра подключены к первому в второму входу сумматора: соответственно, вторсА выхоа суммато- . ра ПОДКЛЮЧИ к вторсжгу входу элемента ИЛИ, третьи входы второго н третьего регистров объединены и являются дополнительным входом преобразователя координат. На фиг. 1 приведена структурная электрическая схема предлагаемого преобразовагепя: коордннаг; на фиг. 2 - времен- ные диаграммы, поясняющие его рабогу. Преобразователь координаг содержит датчик 1 текущей дальности, коррек ф 2 высоты, элемент ИЛИ 3, счетчик 4, первый регистр 5, сумматор 6 и вторсйс 7 в третий 8 регистры. Устройство работает следующим образом. На первый и второй входы датчика 1 текущей дальности поступают соответствен но импульс запуска и код задержки сигнала по дальности, а на первый и вторсй входы первого регистра 5 - соответственно двоичный код синуса sin Ч угла места и сигнал его записи в первый регистр 5, Перед каждым зсдадированивм за пределами интервала рабочей дальности в первый регистр 5 вводится двоичный код синуса f угла места, характеризующий положение антенны радиолокатора в вертикальной плоскости на очередном дсядировании.По импульсу запуска в датчике 1 текущей дальности начинается формирование последовательностей такто1вых импульсов ТИ1, ТИЗ, ТЙ5 (фиг. 2о|,€,е), имеющих период следования t ц , а также двоичного кода текущей дальности, причем для повьпдения точности начало формирсжания указанных сигналов задерживается в соответствии с кодом задержки по дальности. D результате временного контактования дальности в датчике 1 текущей дальности интервал рабочей дальности Т) разделяется на N элементарных участков (дискретов) дальности величиной AD h, причем для значения Д D справедливо соотношение ДТ)С . где С - скорость света. Текущее значение дальности Х)- может быть выражено через номер И дискрета дальности ( И изменяется от 1 до N ) следующим образом
т,..,т,,.,
(3)
Если принять величину uD дискрета дальности за единицу, то его проекция
Для учета влияния кривизны Земли на значение высоты от дальности в текущее а.начение двоичного кода высоты вносится поправка Н| путем добавления к числоимпульсному коду ТИ2 (фиг. 2 б) дополдЦ в вертикальной плоскости будет исленно равна синусу sih V УГла места Masivi М SihC 2е где Е - разрядность первого регистра 5. Перед очередным зондированием в. от импульса конца дистанции, вырабатываемой на дальности , и очередным импульсом запуска второй и третий регистры 7 и В очищаются по сигналу, поступающему на их третьи вхош. С момента начала отсчета дальности начинается сложение двоичного кода nf , хранящегося в первом регистре 5, с двоичным ifofloM, хранящимся в третьем регистре 8. После окончания переходных прсадессов в сумматоре 6 через время Tin ДВОИЧНЫЙ код суммы с вьосода сумматСра 6 записывается во второй регистр 7 по тактовому импульсу ТИЗ (фиг, 2в), поступающему на его второй вход. Затем по тактовому импульсу ТИ1 (фиг. 2а) сумма с выхода регистра 7 переписываётся в третий регистр 8 и вновь складьшается с двоичным кодом SIM Ч , хранящимся в первом регистре 5 Вдрезультате в сумматоре 6 осуществляется вычисление двоичного кода текущего значения Н-у высоты в соответствии с соотношением ..... К) Разрядность сумматора 6 устанавливается равней разр$1Дности двоичного кода SW f угла места, поэтому значение дво ичного кода высоты Н формируется на его втором выходе в виде импульсов ТИ2 (фиг. 26) переноса старшего ра:фяда, которые через элемент ИЛИ 3.поступают в счетчик 4, где их количество подсчитывается и, таким офазом, число импульсный код текущего значения высоты Hf преобразуется в двоичный код ТИ4М и ТИ4С, поступающий на выход преобразователя координат (фиг.2г, д), где ТИ4Л1 и ТИ4Ссигналы на выходах мйадшего и старщего азрядов счетчика 4. нительных импульсов на дальностях Д1,Д Д,,..,ДК согласно соотношению -/KCt где К - копичесгво импу/ьсов. когфое неббходимо добаввгь в число тлпульсный код ТИ2 к моментуДо стиження дальносгн Дц; эквивалентный радиус Земли с учетом рефракции радиоволн; t г период следования импульсов ТИ на втором выходе датчика 1 текущей дальности равный или кра ный периоду 6 (4 /1воичный код текуп(его значения дальне сти с первого выхода датчика 1 текущей дальности поступает в корректор 2 высоты, выхода которого на Дальностях Д1, Д2,,,.,Дк на первый вход элемента ИЛИ 3 поступают по одному импульсу из последо вательности тактовых импульсов ТИ5 (фиг.2е) с второго выхода датчика 1 текущей дальности. Через элемент ИЛИ 3 импульсы коррекция высоты поступают в счетчик 4, увеличивая значение кода в счетчике 4 каждый раз на единицу, что, соответствует коррекции высоты на дальностях Д1, Д2,..., величину Н у со ласно соотношению КдН.. С1) Для обеспечения отсутствия слоев при работе счетчика 4 последовательность импульсов ТИ5, по которым осуществля ется коррекция высоты задержана относительно тактовых импульсов ТИЗ на время, большее или равное времени Т2„ переходных продессов в счетчике 4 Для формирования значения высоты по отношению к вгнже распопоженной по уровню условной географической точки в счетчик 4 перед, каждым бчередным . осядированием может быть введен двоичный код начальной высоты Н Таким образом, в преобразователе координат осуществляется формирование двоичного кода текущего значения высоты Н в соответствии в соотношением (8) Прсщесс вьгчгислення и преобразования высоты Н продолжается до максимальной работы длительносгн) после чего на выходах датчика 1 текуа ей дальности прекращается формирование такговых импульсов ТИ1, ТИЗ, ТИ5 н двоичного кода текущей дальности, а второй и третий регистры 7 и 8 очищают по сигналу, поступающему на их третьи входы. Перед началом следующего зондирования и первый регистр 5 вводится новое значение двоичного кода синуса sitt Ч угла места и по следующему импульсу запуска процесса вычисления и преобразования координат повторяется. Наличие новых существенных признаков выгодно отличает, предлагаемый преофазс«атель кофдинат от других известных устройств того же назначения, так как в нем достигается более высокая точность. Формула изобретения Преофазоватеяь координат, содержащий Первый регистр, последователыю соединенные датчик текущей дальности, корректор высоты, элемент ИЛИ и счетчик, выход является выходом преофазовагеля координат, вторсА вход корректора высоты подключен к второму выходу датчика текущей дальности, первый и второй входы которого, а также первый и второй входы первого pemcipa являются входами прео азователя координат, о т л и ч ачающийся тем, что, с целью повышения точности преобразования координат, в него введены последовательно соединенные сумматор, вторсй и третий регистры, причем третий и четвертый выходы датчика текущей дальности подключены к второму входу второго и третьего регистра соответственно, выход первого регистра и выход третьего регистра подключены к первому и второму входу сумматора соответственно, второй выход сумматсра подключен к второму входу элемента ИЛИ, третьи входы второго и третьего регистсйв объединены и являются дополнительым входом преофазователя координат. Источники информации, принятые во внимание при экспертизе 1, Авторское свидетельство СССР 644288, кл. GOlS 7/44, 1979.
Фиг. 2
