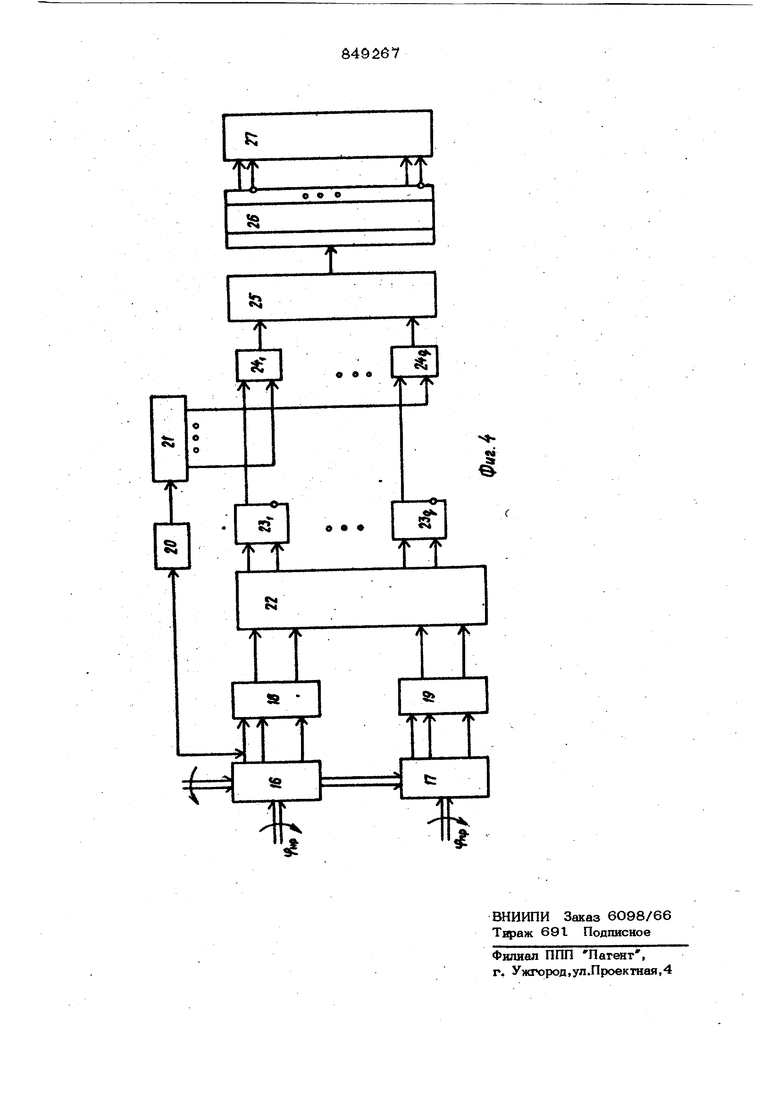
Изобретение относится к автоматике и вычислительной технике и может быть использовано в 1ш|)ррБых следящих системах управления объективами, содержащих ЦВМ . Известны щфровые преобрааежатели угла (ЦПУ), основанные на использ(жаНИИ механической развертки квантующей шкалы. Их особенностями являются наличие опорного и сигнального чувствитепьгных элементов, которые во взаимодействии с квантующим элементом, связанным с приводом, осуществляют преобразсюа ние квантованной величины в электрическую величину l . Недостатком изв естных ЦПУ является низкая точность преобразования угла код, обусловленная трудностями изготовления квантующей шкапы с малой дискретностью. Наиболее близким по технической сущ ности к предлагаемому является фотоэлек рический преобрааоватетть угла п(орота вала в число, содержащий корпус , при вод, измерительный индексные ; иепол вижный и подвижный диски с радиальными растрами и репершхми штрихами, на измерительном диске расположены hi реперных штрихов, нанесенных через инт гаалы по длине его окруж-; ности, а один них выполнен по отношению к другим удлиненным, на индексных дисках расположены по два реперных штриха, которые нанесены один над другим , фазсжыа растровые датчика угла, фазовый и реперные выходы которых соединены С входами блоксв формирования Старт и Стоп импульсов, блок квантования , блок задержки импульсов , wi триг геров и элементе И, блок управления, блок сбора импульсов и блок 11и))ровой индикадии 2. Недостатком известного фотоэпектри ческого преобраэ(ателя является относительно н |Ысокая точвосгь обуслсюленная случайной и систематическ А погрешностями от неточности сформирования Старт и Стоп импульсов и неточности изготовления радиаяьного растра. Цель изобретения - повышение точности фотоэлектрического преобразования угла поворота вапа в число. Поставленная цель достигается тем, что , в фотоэлектрическом преобразователе угла поворота вала в число, содержащем корпус, в котором жестко за1феплен неподвижный индексный диск, с радиальным растром, привод, на валу которого расположен измерительный диск с радиапьг ным растром и 1 реперными штрихами, нанесенными через равные интерватсы по длине его окружности, а один из них выпопнен по отношению к другим удлиненным подвижнь1й индексный диск с радиальюлм растром, установленный на 1амеря&лам вапу, на индексных дисках расположено по два коротких реперных штриха, которы нанесены один над другим, первый фазовыЛ растровый датчик угла, включающий осветительную и фотоприемную системы, измерительный и неподвижный индексный диски, а второй - осветительную и фотс«риемную системы, измерительный и подвижный индексный диски, фаз(жый и реперные выходы пе(ого и второго фаЗСШ.ЫХ растрсжых датчиков угла соединены с соответствующими входами блок1Ж формир(жания Старт и Стс« импульсов соответственно, выходы которых соеди нены с соответствующими входами блока управления, выхоцы которого соединены с соответствдощими входами ш триггеров, прямые выходы которых соединены с перв ми входами элементе И соответственно, выходь которых подключены к соответст вующим входам блока сбора импульсов, выход которого соединен со входом счетч ка импульсе®, выходы которого подключены к соответствующим входам блока щфровой индикации, фазсжый выход первого фазового растрового датчика угла через блок квантования фазы соединен со входом блока задержки счетных импульсов, соответствующие выходы которого соедине Гй со вторыми входами элементе И, на индексных дисках нанесены M ( Vvt-l) коротких реперных штрихов и радиальных растров через равные интер1валы по длине окружности, и дополнительно введены ш { Vvi - 1) триггеров и элементов И, первый и второй фазовые растровые датчики угла дополнительно содержат VM ( У -1) выходов, которые соединены с дополнител ными входами блоков формирования Стар и Стоп импульсов, блок управления дополнительно содержит Jn ( Ш - 1) выходов, которыеподключены к соответствующим входам irvi ( VV1 - 1) триггерсе, прямые выходы которых соединены с первыми входами дополнительных элементов И, выходы которых подключены к соответствующим дополнительным входам блока сбора импульсов, блок .задержки счетных импульсов дополнительно содержит yvi ( wi - 1) выходов, которые соединены со вторыми входамТя дополнительгных элементе И, На фиг. 1 схала.тично изображена конструкция преобразователя, общий вид, на фиг. 2 и 3 - часть измерительного диска и часть неподвижного и подвижного индексных дисков} на фиг, 4 - структурная схема преобразователя. Фотоэлектрический преобразователь угла псжорота вала в число содержит корпус I,привод 2, вал 3 привода, измерительный диск 4, неподвижный индексный диск 5, подвижный индексный диск 6 с радиальным растром, вал 7, угловое положение которого преобразуется в код , осветительную систему 8, фотоприемную систему 9, измерительный радиальный растр 10, индексный радиальный растр II,короткие реперные штрихи 12, из мерительного диска, удлиненнЬхй реперный штрих 13, короткие реперные штрихи 14 индексных дисков, одиночные короткие реперные штрихи 15 индексных диске, фазовые растреявые датчики 16 и 17, блоки 18 и 19 формирования Старт и Стоп импупьссйв, блок 20 квантежания фазы 21 задержки счетных импулы:ов, блок 22 управления, триггеры 2 ,,,23-, .эпемен-гы И 24,,, 24д,блок 25сбораимпульсов, счетчик 26 импульсов, блок 27 цифровой индикации. На фиг, 1,2,3,4 введены следующие обозначения : Ш - углдаой шаг штрихов радиального растра lOi %р,нр.%р соответственно угловые положения измерительного, неподвижного и подвижного индексных дисков 4,5 и 6, Vai 1,2 - соответственно фазовые выхенды датчиков 16 и 17, Vn ...,Vti /p«; , соответственно реперные выходы датчиков 16 и 17., V старт, соответственно Старт, Стоп импульсы. Для устранения погрешности от эксцйятриситета дисков 4,5 и 6 фазшые выходы датчике 16 и 17 выполнены с двухсторонним считьшанием (фиг,1). Угловое расстояние между репер ными штрихами 12 диска 4 и реперными штрихами 14 дисков 5 и 6 равны 2ft| Ж и 2rt|hi- соответственно. Осветительная 8 и фотоприемная 9 системы , диски 4, 5 в совокупности представляют собой датчик 16, а осветитшьная 8 и фотоприемная 9 системы, диски 4,6 - да-гчик 17, которые содержат фазовые и реперные выходы съема информации (фиг.1, 2 и 3) Фотоэлектрический преобразователь угла поворота вала в число работает следующим образе. При постоянном вращении приводом 2 диска 4 с фазовых выходов датчиков 16 и 1 7 снимаются напряжения соответственно которых равны f-lfnp-V. и линейно зависят в пределах шага Ш от разностей угловых положений диске 4, 5 и 4,6 соответственно. Эти напряжения поступают на блоки 18 и 19 формирования Старт и Стоп сигналов и на блок 2О квантования фазы. Последний фор мирует один счетный икшульс на каждое приращение фазы, равное fD/H , что соот ветствует шагу квантсжания угла на вели чину 01)/И . В момент, когда удлиненный реперный штрих 13 диска 4 проходит мимо реперных штрихов 14 и 15 неподвижного инде сного диска 5, на двух реперных выходах датчика 16 вырабатываются напряжения Up( и иpi которые поступают на блок 18 формирования Старт сигнале, в котором (Jp и р„ дпя 6onse точной фиксации углового положения. В резупьтате на выходах блока 18 вырабатываются импульсы и старт и U старт, посту пающие на входы блока 22 управления. Последний запускает триггер стар- тсжое единичное состояние. При этом отк{ывается элемент И 24 , и счетные импульсы с первого выхода блока 21 задержки счетных импульсоз проходят через эпйлент И 24 и блок 25 сбора импульсов на вход счетчика 26 импульсе. После этоЬо произойдет m ( М -1)-1 сежмещений реперных штрихов 12 и 14 осуществляющих поочередно запуски в стартовое состояние соответственно триггеров 23д, .., с , и каждый раз со стартом очередного триггера 23 счетчик 26, продолжая подсчет счетных импульсов, вы ванных стартами предыдущих триггеров 23 начинает дополнительно подсчет счет 8 676 ных импульсов, снимаемых со следующего по порядку выхода блока 21 задержки счетных .импульсов, В момент, когда удлиненный реперный штрих 13 диска 4 проходит мимо реперных штрихе® 14 и 15 подвижного диска 6, на двух реперных выходах датчика 17 вырабатьшаются напряжения Up и 1)рд и аналогичнь1м образом, как было описано выше, блок 19 формипг ания Стоп сигнала вырабатывает и стоп, импульсы, KOTopbie,поступая на входы блока 22 управления, устанавпи вают триггер 23 в исходное состояние, а элемент И 24 при этом закрывается. Посла этого происходит Vn ( Ш - 1 )-1 се мацений штрихе 12 и 14, осуществляющих последовательно возврат всех Ум ( W1 - 1) триггеров 2§..,...q,V) в исходное оссостояние и закрыванию m ( И1 - l) эла 1ентов И 24 , С В момент, когда закроется последний из открытых элет гентсж И 24, , подсчет счетных импульсов прекращается и счетчик 26 импульсов зафиксирует код, равный сумме кодсж N ,..., q, , каждый из кото( является и11})ровым эквивалентом углового положения подвижного индексного диска 6 относительно неподвижного индексного диска 5, т.е. М Среднеарифметический код N s-:I N является конечным результатом прообразе- вания угла поворота вала в число. Таким образом, за два оборота измерительного диска , iT.e. за один цикл меха. нической развертки квантующей шкалы, tipo взводитсяCj, стандартных и стопных преобразований угла поворота вала в число, причем каждое из о преобразований осуществляется использованием для формирования Старт, Стоп импульсов и счетных импульсов разных участке „1растровой дорожки (квантующей шкапы), имеющей погрешности, разные по величине и знаку на разных ее участках, что позволяет повысить точность преобразежателя по срввнению с известным. Формула и. зобретения Фотоэлектрический преобразователь гла поворота вала в число, содержащий орпус, в которсзм жес-псо закреплен непод« ижный индексный диск с радиальным астром, привольна валу которого располоен измерительный диск с радиальным астром и hi реперными штрихами, нанеенными через равные интервалы по длине гО окружности , а один из них выполен по отношению к другим удлкне woMt подаижный индексный диск с радиаль ным pacTftoM, установленный не измеряемом валу, на индексных дискэх распопо-, жвао по два короткихреперныхштрнха.которые нанесены одив над другим, первый фазовый ржтровый датчик угла, включак ший (хшетитель1 тю н фотоприемную систе му, ВЕзмеритольный и неподвижный индексный диски, втогрой - осветительную и фотопряемную системы, измерительный и подвижный индексный диски, фазовый и выходы первого и второго фа вооых рас1р(ых датчиков угла соединены с соо-геетстаующими входами блоков формирования Старт и Стоп импульсе соответс-гаенно., выходы которых соединены с соответсгауюпшМи входами блока управления, выходы которого соединены с соответствующими входами hi триггеров, выходы соедш1ены с первыми входами элементов И соответст венно, выходы кото{я 1х подключены к соот ветствующим входам блока сбора вмпульсов, выход которого соединен со входом счетчика импульсе, выходы которого под ключены к соответствующим входам блока шфрове индикации, фазовый выход первого фазового растрового датчика угла через &IOK .квант1жания фазы соединен со входом блока задержки счетных импульсов, соответствующие выходы которого соединены со вторыми входами элементов И, отличающийся тем, что, с S 7 целью повышения точности преобразователя, на индексных дискеос нанесены ni ( m-l) коротких реперных штрихов и радиальных растре равные интервалы по длине окружности и дополнительно введены VM ( wi - l) триггеров и элементов И первый и второй фазс ые растрешые дат чикИ угла дополнительно содержат hi(nivl) выходов, которые соединены с дополнитель входами блоков форм1фовання Старт и Стоп импульсе, блок управления дополнительно содержит И1 ( Jti -1) выходов, которые подключены к соответст вуюпол входам IV) ( VH - 1) триггеров, прямые выходы которых соединены с пе ВБ1МИ входами дополнительных элементов И, выходы подключены к соответ ствующим дополнительным входам блока сбора импульсе, блок задержки счетных импульсов дополнительно содержит ГУ) ( hi- l) выходов, которые соединены со вторыми входами дополнительных элементов И . Источники Информации, принятые во внимание при экспертизе 1.Преснухин Л, Н, и др. Муаровые растровые датчики положения и их применение . М,, Машиностроение 1969, с. 93. 2.AB-topcKoe свидетельство СССР по заявке hfe 2778017/18 4, кпЛОЗС 9/О6, 07.06.79 (прототип).
Фиг.1
| название | год | авторы | номер документа |
|---|---|---|---|
| Фотоэлектрический преобразовательуглА пОВОРОТА ВАлА B чиСлО | 1979 |
|
SU849266A1 |
| Фотоэлектрический преобразовательуглА пОВОРОТА ВАлА B чиСлО | 1979 |
|
SU822118A1 |
| Фотоэлектрический преобразовательуглА пОВОРОТА ВАлА B чиСлО | 1979 |
|
SU822117A1 |
| РАСТРОВЫЙ ПРЕОБРАЗОВАТЕЛЬ «ПЕРЕМЕЩЕНИЕ — ФАЗА — НАПРЯЖЕНИЕ» | 1973 |
|
SU393760A1 |
| Эталон единицы плоского угла | 2016 |
|
RU2637727C1 |
| Преобразователь угол-код | 1983 |
|
SU1116447A1 |
| Фотоэлектрический преобразователь угла поворота вала в код | 1976 |
|
SU651390A1 |
| Фазоимпульсный преобразователь угловых перемещений | 1975 |
|
SU954821A1 |
| Фотоэлектрический преобразователь угловых перемещений | 1977 |
|
SU696280A1 |
| Многооборотный преобразователь угол - код | 1990 |
|
SU1711329A1 |

13
12
12
15
г
р /« /4
11
2гг/т.
о
фиг. 2
.S
Н
о
I
t k
7ч У
«к
000
f 7
йА S
