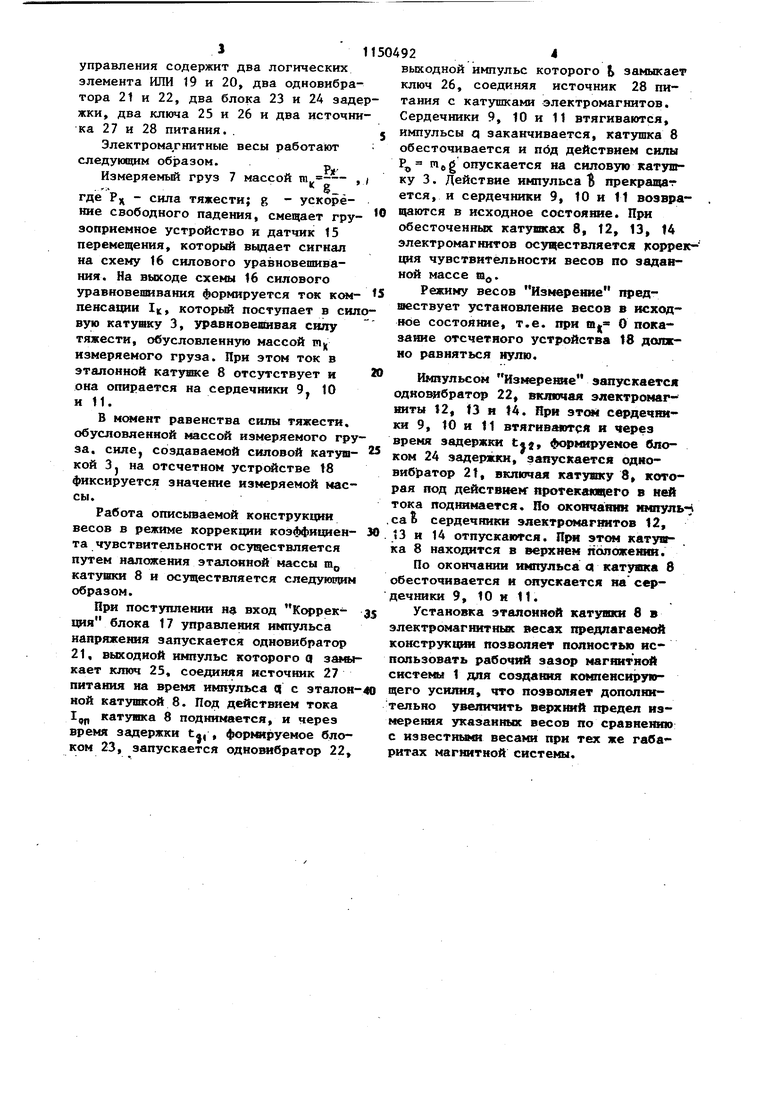
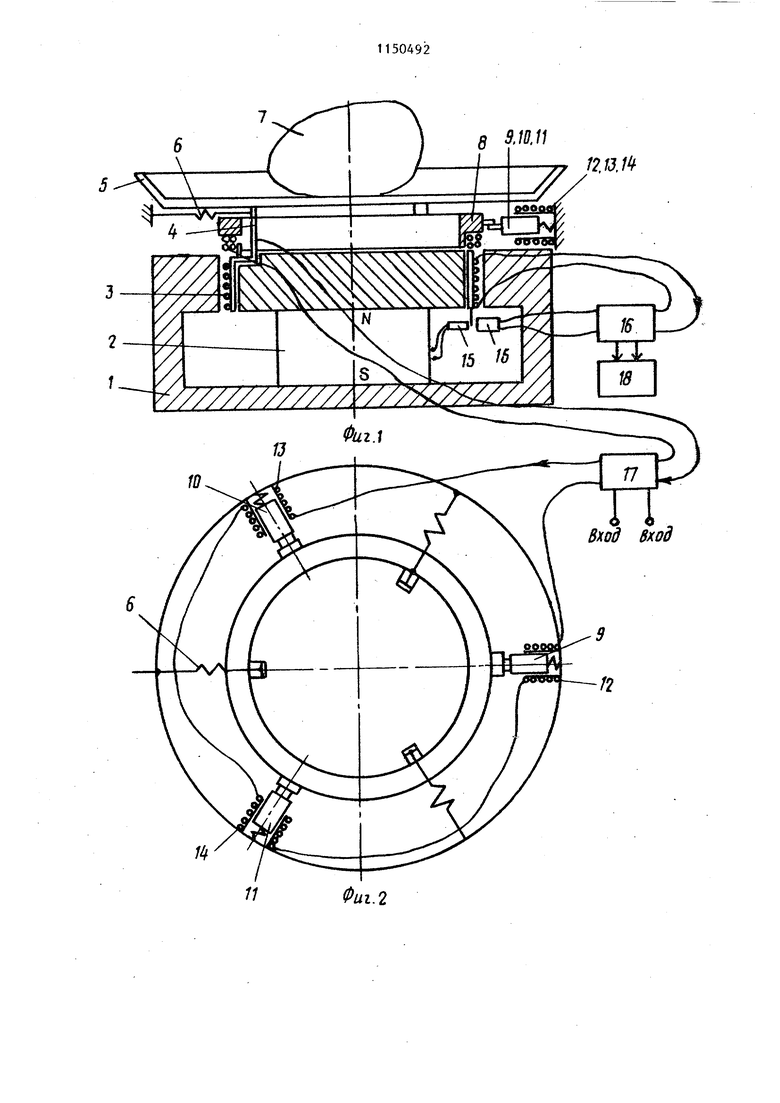
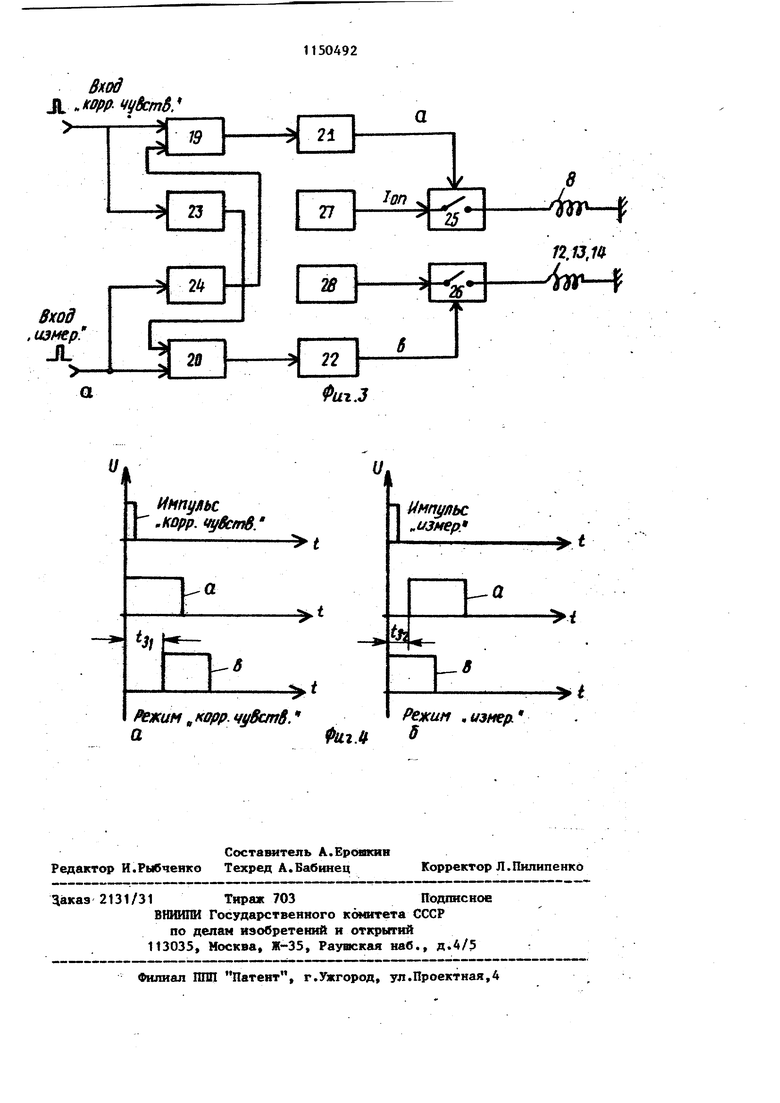
f Изобретение относится к весоизме рительной технике и может быть использовано в весодозируияцих устройствах с электромагнитным управлением. Известно весоизмерительное устройство, содержащее грузоприемный узел, связанный с устройством электромагнитной компенсации, включающий силовую катушку, усилитель и индикатор отклонения lj . Недостатком известного устройств является низкая точность, обусловленная изменением калибровки отдель ных элементов, входящих в состав устройства. Ближайшими по технической сущности к предлагаемым являются электромагнитные весы, содержапще грузо приемное устройство на упругой подвеске, состоящее ни грузоприемной чашки, связанной стержнями с силово катушкой, размещенной в зазоре магнитной системы, систему силового уравновешивания, эталонную катзш ку, отсчетное устройство, датчик перемещения, выход которого связан с входом системы силового уравновешивания, первый выход которой соеди нен с входом отсчетного устройства, а второй выход - с входом силовой катушки, и, блок управления . Недостатками известного устройст ва являются низкая точность, обусловленная влиянием тока опорной катушки на результат измерения, а так же значительное потребление мощности. Цель изобретения - повьш1ение точ ности за счет исключения взаимного влияния силовой и опорной катушек. Поставленная цель достигается тем, что электромагнитные весы, содержащие гру:зоприемное устройство на упругой подвеске, состоящее из Грузоприемной чашки, связанной стержнями с силовой катушкой, размещаемой в зазоре магнитной системы систему илового уравновешивания, первьй выход которой соединен с вхо дом устройства, а втсфой выход - с входом силовой катушки, и блок упра ления, снабжены электромагнитами, катушки которых соединены последова тельно и подключены к первому выход блока управления, второй выход которого соединен с входом эталонной катушки, которая расположена в край 92 X1 нем верхнем положении рабочего зазора магнитной системы и опирается на радиально подвижные сердечники электромагнитов, укрепленных в горизонтальной плоскости, при этом блок управления содержит два ключа, первый и второй источники питания, каждый из которых соответственно через первый и второй ключи соединен с первым и вторым выходами блока управления, два блока задержки, два логических элемента ИЛИ, первый и второй одновибраторы, входы каждого из которых соединены соответственно, с выходами первого и второго логических элементов ИЛИ, а выходы первого и второго одновибраторов соединены соответственно с управляющими входами первого и второго ключей, при этом вход Измерение блока управления соединен с первым входом первого логического элемента ИЛИ и через первый блок задержки - с вторым входом второго логического элемента ИЛИ, первый вход которого связан с входом Коррекция блока управления и входом второго блока задержки, выход которого соединен с вторым входом первого логического элемента ИЛИ. Предлагаемое техническое решение позволяет исключить в процессе измерения влияние тока эталонной катушки на точность измерения. На фиг. 1 показана элементная схема электромагнитных весов; на фиг. 2 весы, вид сверху; на фиг. 3 - элементная схема блока управления, входящего в состав весов; на фиг. 4 диаграмма прохождения управляющих импульсов в процессе работы весов в режиме Коррекция (а) и Измерение (б). Электромагнитные весы содержат магнитную систему 1 с постоянным магнитом 2, силовую катушку 3, которая с помощью стержней 4 соединена с грузоприемной чашкой 5, упругую подвеску 6, на которую опирается грузоприемное устройство, состоящее из силовой катуяжи 3, стержня 4 и чашки 5, в которой размещается взвешиваемый груз 7, эталонную катушку 8, размещенную на радиально подвижных сердечниках 9, 10 и 11 электромагнитов 12, 13 и 14, датчик 15 перемещения, схему 16 силового уравновешивания, блок 17 управления и отсчетное устройство 18. При этом блок 17
управления содержит два логических элемента ИЛИ 19 и 20, два одновибратора 21 и 22, два блока 23 и 24 задежки, два ключа 25 и 26 и два источника 27 и 28 питания..
Электромагнитные весы работают следующим образом.
Измеряемый груз 7 массой ,
. -;.
где РХ - сила тяжести; g - ускорение свободного падения, смещает грузоприемное устройство и датчик 15 перемещения, который вьщает сигнал на схему 16 силового уравновешивания. На выходе схемы 16 силового уравновешивания формируется ток к 1пенсации 1, который поступает в силвую катушку 3, уравновеоивая силу тяжести, обусловленную массой Иц измеряемого груза. При этом ток в эталонной катуоке 8 отсутствует и она огтрается на сердечники 9. 10 и 11.
В момент равенства силы тяжести, обусловленной массой измеряемого груза, силе, создаваемой силовой катушкой 3j на отсчетном устрсйстве tS фиксируется значение измеряемой массы.
Работа описываемой конструкции весов в режиме коррекции коэффициента чувствительности осуществляется путем налшсения эталонной массы т,, катушки 8 и осуществляется следую1пим образом.
При поступлении на вход Ксфрекция блока 17 управления импульса напряжения запускается одновибратор 21, выходной импульс которого Q замыкает ключ 25, соедшняя источ1шк 27 питания на время импульса q с зталон ной катушкой 8. Под действием тока 1, катушка 8 поднимается, и через время задержки t|, , формируемое блоком 23, запускается одновибратор 22
выходной импульс которого Ь замыкает ключ 26, соединяя источник 28 питания с катушками электромагнитов. Сердечники 9, 10 и 11 втягиваются, импульсы q заканчивается, катушка 8 обесточивается и пбд действием силы Р опускается на силовую катушку 3. Действие импульса В прекращав ется, и сердечники 9, 10 и 11 возвращаются в исходное состояние. При обесточенных катушсах В, 12, 13, 14 электромагнитов осуществляется icoppeЩ1Я чувствительности весов по эаданной массе ш.
Режиму весов Иэмерение предшествует установление весов в исхадное состояние, т.е. при т О показание отсчетиого устройства 18 должно равняться нулю.
Импульсом Измеренке запускается одно {братор 22 «каючяя электронаг- 1шты 12, 13 и 14. При этом сердечники 9, 10 и 11 втягиваются и через время задержки teff фсфнируемое блоком 24 задержки, запускается одновибратор 21, включая катуяжу 8, которая под действием протекающего в ней тока поднимается. По окончатт ммпуль саЕ сердечники электромагяитов 12, 13 и 14 отпускаются. При этой к&туггка 8 находа тся в верхнем |т1эложеяия.
По окончании и О1ульса а катушка 8 обесточивается и опускается на сердечники 9, 10 и 11.
Установка эталонной катушки 8 в электромагнитных весах предяагаеной конструкщш позволяет полностью использовать рабочий зазор магяитной системы 1 дпя создания компенсируигщего усилия, что позволяет дополнительно увеличить верхний предел измерения указанных весов по сравнению с известн1)ФО1 весами при тех же габаритах магнитной системы. 8 9Л11 Фиг.2 12,13.1
Sxod JH Kffpp. /y8cm$.
| название | год | авторы | номер документа |
|---|---|---|---|
| Электромагнитные весы | 1988 |
|
SU1627854A1 |
| Электромагнитные весы | 1979 |
|
SU838388A1 |
| Весы с электромагнитным уравновешиванием | 1982 |
|
SU1046619A1 |
| Электромагнитные весы | 1979 |
|
SU838389A1 |
| Электронные цифровые весы | 1981 |
|
SU991175A1 |
| Способ управления электрогидравлической системой и устройство для его осуществления | 1989 |
|
SU1779806A1 |
| Автоматическое весоизмерительноеуСТРОйСТВО | 1979 |
|
SU851107A1 |
| Весоизмерительное устройство | 1986 |
|
SU1314233A1 |
| Весы с электромагнитным уравновешиванием | 1986 |
|
SU1394055A1 |
| Цифровые весы | 1986 |
|
SU1352233A1 |
ЭЛЕКТРОМАГНИТНЫЕ ВЕСЫ, содержаоц е грузоприемное устройство на упругой подвеске, состоящее из грузоприемной чашки, связанной стержнями с силовой катушкой, размещаемой в зазоре магнитной систе «л, систему силового уравновешивания, эталон ную катушку, отсчетное устройство, блок управления, датчик перемещения, выход которого связан с входом системы силового уравновешивания, первый -выход которой соединен с входом отсчетного устройства, а второй ее выход соединен с входом силовой ка- . тушки, отличающиеся тем, что, с целью повьш1ения точности за счет исключения взаимного влияния силовой и опорной катушек, весы снабжены электромагнитам, катушки которых соединены последовательно и подключены к первому выходу блока управления, второй выход которого соединен с входом эталонной катушки, которая расположена в крайнем верхнем положении рабочего зазора магнитной системы и опирается на радиально подвижные сердечники электромагнитов, укрепленных в горизонтальной плоскости, при этом блок управления содержит два ключа, первый и второй источники питания, каждый из которых соответственно через первый и второй ключи соединен с первым и вторым выходами блока управления, два блока задержки, два логических элемента НГМ, первый и второй одно(Л вибраторы, входы каждого из которых соединены соответственно с выходами первого и второго логических элементов ШШ, а вькоды первого и второго одновибраторов соединены соответственно с упраапяющими входами первого и второго ключей, при этом вход Измерение блока управления соединен с первым входом первого логического элемента ИЛИ и через первый блок задержки - с вторым входом втоiporo логического элемента ШШ, первый вход которого связан с входом Коррекция блока управления и входом второго блока задержки, выход которого соединен с вторым входом первого логического элемента ИЛИ.
Фиг,3
a
-I Инпульс
Y -корр. чубстВ
-
a
-
3t
. чуВстб.
Puг.f
a
11 Mnytibc I „измер.ч
M
J
th
Режин измер.
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
