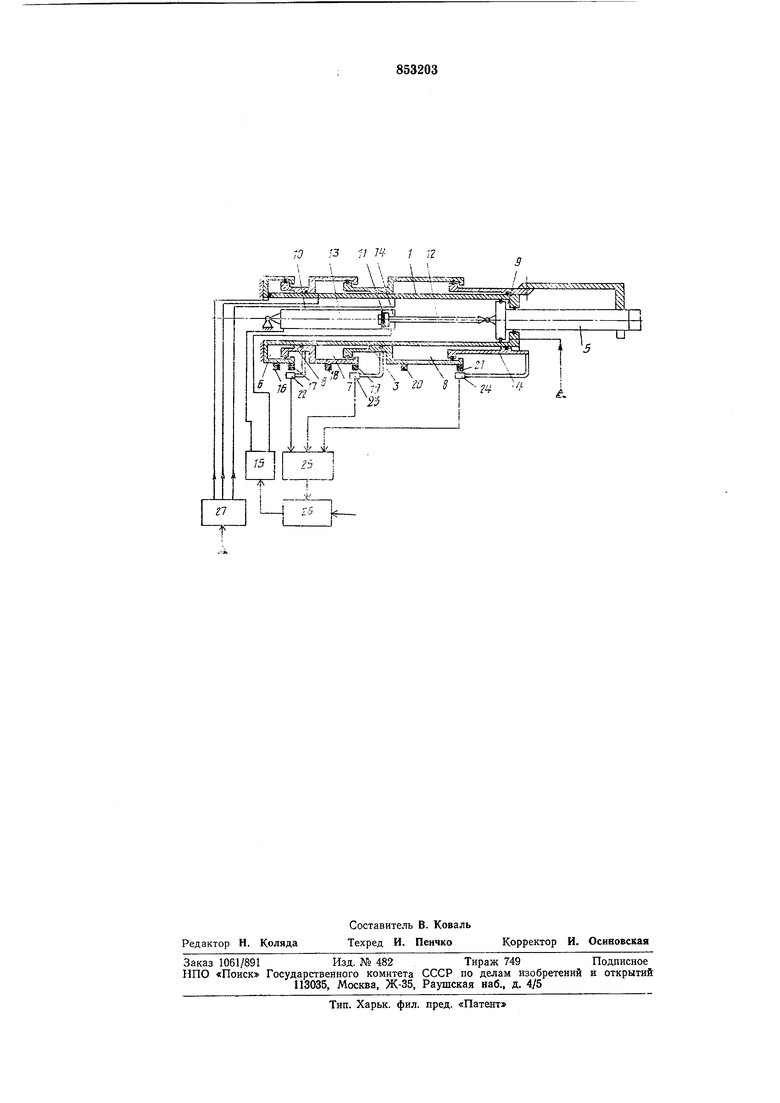
цилиндра 1 с последовательно сцепленными поршнями 2--4 и штоком 5, с образованием рабочих полостей 6-9. Со штоком 5 шарНИрно связано демпфирующее устройство, включающее гидроцилиндр 10 с расположенным в нем поршнем 11 со штоком 12 с образованием полостей ,13 и 14 и элемент 15 включения. Кроме того, привод .включает датчик обратной связи, выполненный в виде сопел и заслонок 22-24, логический элемент И 25, генератор импульсов 26 -и распределительное уст.ройство 27. Рабочая среда постоянно подается в рабочую полость 9 и к распределительному устройству 27.
Демпфируемый позицианный привод работает следующим образом.
В блоке управления (на чертеже не по«азан) программируются координаты позициовироващия и величины требуемых перемещений, и сигналы управления через распределительное устройство 27 поступают в рабочие полости 6, 7, 8 или 9 пневмогидроцил индра 1, что вызывает перемещение На рабочих скоростях порш,ней .2, 3 и , а вместе с ними и штока 5, например, . вправо (по чертежу). При этом демпфирования не происходит, поскольку осуществляется свободное перетекание рабочей жидкости из полости 14 в полость 13 гидроцилиндра 14 через элемент 15 включения.
При перемещении поршней 2, 3 млл 4 лшевмогидроцилиндра 1, вместе с ними перемещаются соответствующие сопла 1в и 19, 20 и 21, и заслонки 22, 33 или 24, при взаимодействии которых формируются сигналы управления элем.ентом 15 включения. Для одновременного отслеживания положения заслонок 22, 2S и 24 относительно соответствующих сопел ,16 и 17, 18 и 19, 20 и в схему включен логический элемент И 25, выходной сигнал которого запускает в работу генератор импульсов 26. .Мешая скважность сигналов, генератор импульсов 26 управляет элементам 15 включения, а вместе с тем скоростью перетекания рабочей жидкости из полости 14 в полость 13 гидроцилиндра 10, и в результате - скоростью перемещения щтока 5 пневмогидроцилиндра 1, подвижное расположение заслонок 22, 23 и 24 относительно поршней 2, 3 и 4 позволяет осуществлять регулирование момента срабатывания датчика обратной связи, а изменением скважности генератора импульсов 26 можно формировать требуемый закон торможения с учетом инерции перемещаемых масс. .После окончаршя демпфирования происходит обесточивание генератора импульсов 26 и элемента 15 включения, подготавливая условия для свободного перетекания рабочей жидкости -из полости /ч в полость М «ли наоборот.
Применение управляемого демпфирующего устройства, расположенного внутри иаправляющей привода соооно штоку исполнительного ридроплевмодвигателя позволяет упростить конструкцию привода в целом, уменьшить его габариты, обеспечивает условие технологичности П|ри сборке,
повышает плавность перемещения штока за счет исключения заклиниБания, позволяет получить требуемые динамические характеристики и управлять законом разгона и торможения тодвижных элементов привода, существенно расширив, таким образом, технологические и функциональные возможиости привода, и обеспечив возможность использования его для вьшолиения высокоточных технологических процессов,
таких, например, как селективная сборка прецизионных соединений, сборка макромодельных схем и др.
Формула изобретения
1.Демпфируемый позиционный привод, содержащий мсиолнительный пневмогидродвигатель, выполненный в виде пиевмогидроцилиндра с последовательно сцеплениым:и поршнями И штоком, с которым связа-но демпфирующее устройство с элементом Включения, и датчик обратной связи, отличающийся тем, что, с целью упрощения конструкции, повышения надежности
и улучшения динамических характеристик, лривод дополнительно снабжен логическим элементом ,И и генератором импульсов, демпфирующее устройство установлено внутри пневмогидроцилиндра соосно штоку
и связано с последним шарнирно, а датчик обратной связи выполнен в виде сопел и заслоиок, установленных на поршнях, иричем заслонка для сопел каждого из поршней установлена на последующем поршне, а элемент включения демпфирующего устройства связан С датчиком обратной связи через логический элемент И и генератор импульсов.
2.Привод по п. 1, отличающийся тем, что заслонки установлены на поршнях
с возможностью осевого перемещения относительно последних.,
3.Привод по пп. 1 и 2, о т л и ч а ю щ и йс я тем, что генератор импульсов выполнен
регулируемым.
Источник информации, принятый во внимание при экспертизе:
1. Авторское свидетельство СССР по заявке № 2689130/25-06, кл. F 15 В 9/03, 1978.
О13 11 141 :2
3 LTl
| название | год | авторы | номер документа |
|---|---|---|---|
| ЭЛЕКТРОГИДРАВЛИЧЕСКОЕ УСТРОЙСТВО УПРАВЛЕНИЯ | 1991 |
|
RU2010108C1 |
| Демпфируемый позиционный привод | 1980 |
|
SU877157A1 |
| ЧЕТЫРЕХЛИНЕЙНЫЙ ТРЕХПОЗИЦИОННЫЙ ГИДРОРАСПРЕДЕЛИТЕЛЬ С РЕЗЕРВИРОВАННЫМ ЭЛЕКТРОУПРАВЛЕНИЕМ ПРИВОДА ПОВОРОТА КОЛЕС ПЕРЕДНЕЙ ОПОРЫ ШАССИ ТРАНСПОРТНОГО СРЕДСТВА С ГИДРОДЕМПФЕРОМ | 2007 |
|
RU2342283C1 |
| Установка для мойки изделий | 1987 |
|
SU1489858A1 |
| Двигатель внутреннего сгорания | 1991 |
|
SU1802191A1 |
| ПНЕВМОУСИЛИТЕЛЬ | 2002 |
|
RU2235222C2 |
| Цифровой пневмогидравлический привод | 1980 |
|
SU1019118A1 |
| РЕГУЛЯТОР СКОРОСТИ ПЕРЕМЕЩЕНИЯ ВНУТРИТРУБНЫХ ИНСПЕКТИРУЮЩИХ СНАРЯДОВ | 2013 |
|
RU2533754C1 |
| Блок комбинированных гидроприводов | 2018 |
|
RU2685115C1 |
| Пневмогидроцилиндр | 1990 |
|
SU1724959A1 |