1
Изобретение относится к весоизмерительной технике, в частности, к устройствам для взвешивания транспортных средств, например автомобилей, в движении.
Известно устройство для взвешивания движущихся транспортных средств, содержащее датчик веса, дифференциатор-формирователь ,элемент выдержки времени, триггер, схему совпадения и интегратор, в котором выход датчика веса подключен параллельно ко входу дифференциатора-формирователя и одному из входов схемы совпадения, выход дифференциатора-формирователя соединен с единичным входом триггера и входом элемента выдержки времени, выход которого подключен к нулевому входу триггера, а выход триггера подключен ко второму входу схемы совпадения, выход которой соединен со входом интегратора l.
Это устройство сложно и не обеспечивает необходимой точности при больших скоростях движения транспортных средств.
Ближайшим по технической сущности - прототипом изобретения - является устройство для взвешивания движущихся транспортных средств, содержащее датчик веса, подключенный к одним входам элементов совпадения, другие входы которых соединены с выходами блока управления, первый вход которого связан с путевыми датчиками 2.
Недостатком прототипа является неудовлетворительная точность при повышенных скоростях движения тран10спортных средств через весоизмерительное устройство. В частности, это обусловлено нестабильностью временных характеристик и сложностью настройки временных характеристик линий залерж15ки сигнала с датчиком веса.
Цель изобретения - повышение точности взвешивания.
Поставленная цель достигается тем, что в устройство введены блоки при20ема информации, блок сравнения, блок хранения информации и сумматор-делитель на два, причем выходы элементов совпадения через блоКи приема информации связаны с входеили блока срав25нения, один выход которого подключен к первому входу блока хранения информации второй вход которого подключен к выходу блока управления, ко вторюму и третьему входам которого
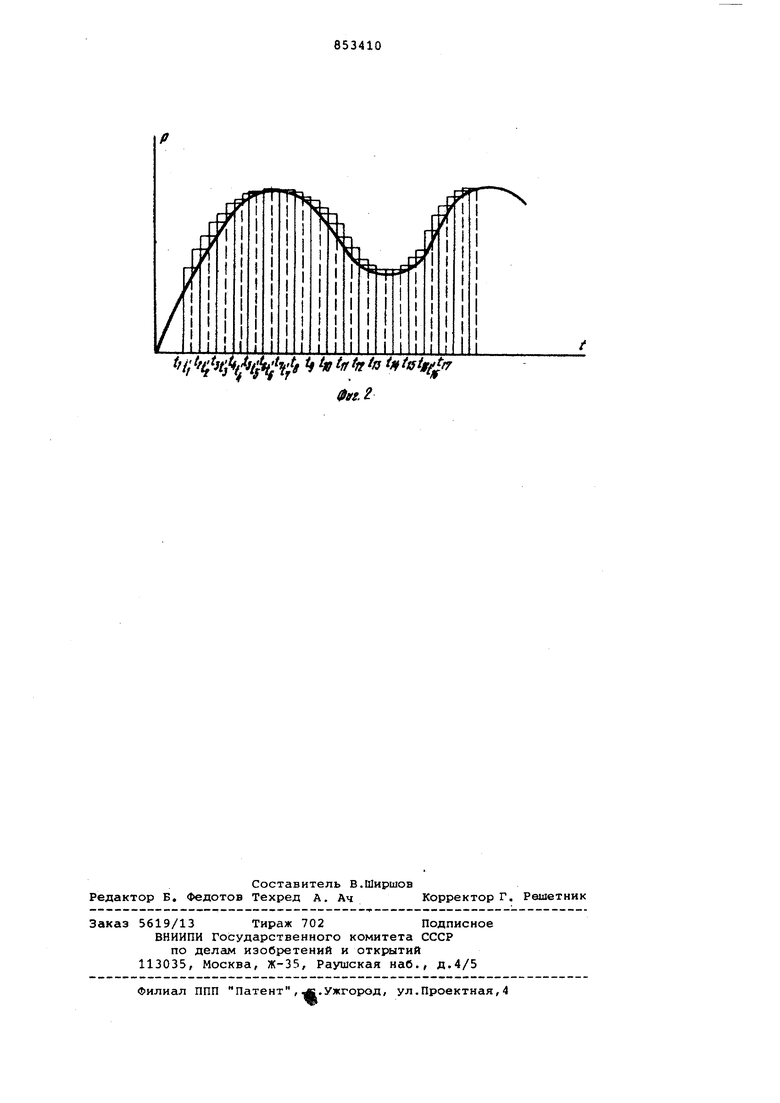
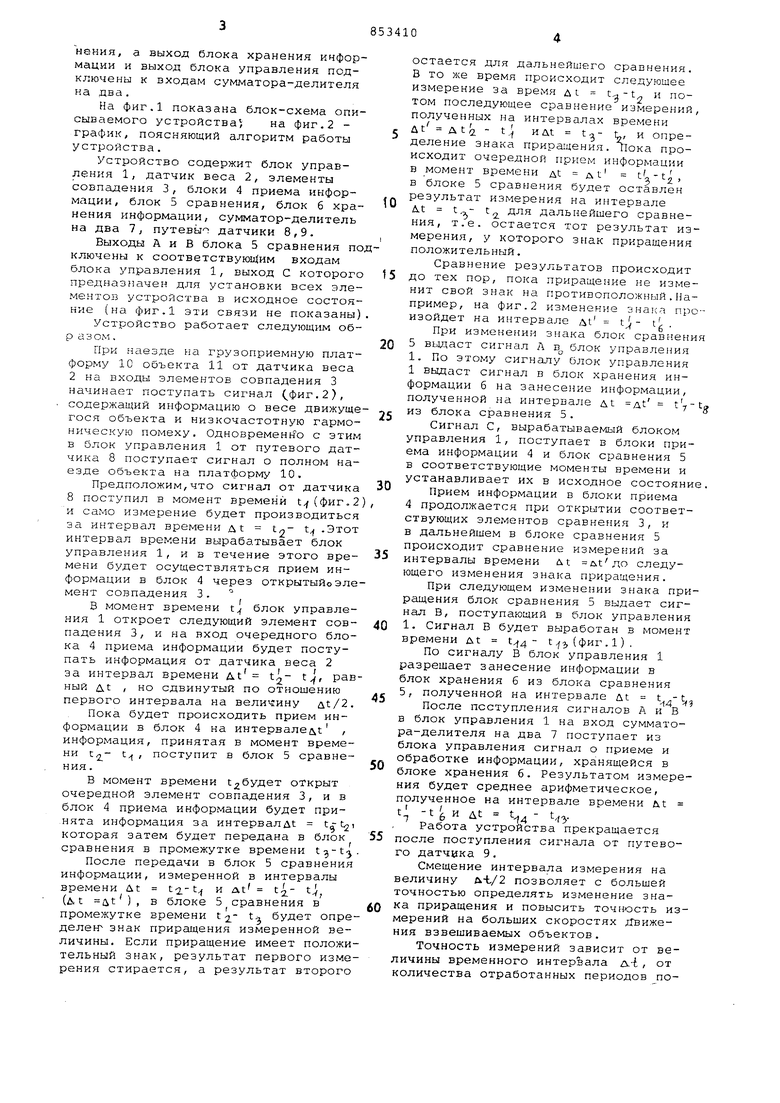
30 подключены другие выходы блока оравнения, а выход блока хранения информации и выход блока управления подключены к входам сумматора-делителя на два . На фиг.1 показана блок-схема описываемого устройства , на фиг. 2 график, поясняющий алгоритм работы устройства. Устройство содержит блок управления 1, датчик веса 2, элементы совпадения 3, блоки 4 приема информации, блок 5 сравнения, блок 6 хранения информации, сумматор-делитель на два 1, путевые датчики 8,9. Выходы А и В блока 5 сравнения по ключены к соответствую14им входам блока управления 1, выход С которого предназначен для установки всех элементов устройства в исходное состояние (на фиг.1 эти связи не показаны) Устройство работает следующим обр а 3 ом. При наезде на грузоприемную платформу 10 объекта 11 от датчика веса 2 на входы элементов совпадения 3 начинает поступать сигнал (фиг.2), содержащий информацию о весе движуще гося объекта и низкочастотную гармоническую помеху. Одновременно с этим в блок управления 1 от путевого датчика 8 поступает сигнал о полном наезде объекта на платформу 10. Предположим,что сигнал от датчика 8 поступил в момент времени 1(фиг.2 и само измерение будет производиться за интервал времени At to t .Этот интервал времени вырабатывает блок управления 1, ив течение этого времени будет осуществляться прием информации в блок 4 через открытыйоэле мент совпадения 3. 3 момент времени t блок управления 1 откроет следующий элемент совпадения 3, и на вход очередного блока 4 приема информации будет поступать информация от датчика веса 2 за интервал времени At t,- t, рав ный дг , но сдвинутый по отношению первого интервала на величину ut/2. Пока будет происходить прием информации в блок 4 на интepвaлeйt , информация, принятая в момент времени tqj- t , поступит в блок 5 сравнения . В момент времени t2бyдeт открыт очередной элемент совпадения 3, и в блок 4 приема информации будет принята информация за интepвaлдt которая затем будет передана в блок сравнения в промежутке времени t-j-tj После передачи в блок 5 сравнения информации, измеренной в интервалы времени At и At (лt ut), в блоке 5 сравнения в будет опре промежутке времени делен знак приращения измеренной величины. Если приращение имеет положи тельный знак, результат первого изме рения стирается, а результат второго остается для дальнейшего сравнения. Б то же время происходит следующее измерение за время Д1 t -1,, и потом последующее сравнение измерений, полученных на интервалах времени Af л t ij 1„, и определение знака приращения. Пока происходит очередной прием информации в момент времени дс ut t -t, в блоке 5 сравнения будет оставлен результат измерения на интервале it t,,- t,-, для дальнейшего сравнения, т.е. остается тот результат измерения, у которого знак приращения положительный. Сравнение результатов происходит до тех пор, пока приращение не изменит свой знак на противоположнрз1й . Например, на фиг.2 изменение знака произойдет на интервале Д1 t - tl . При изменении знака блок сравнения 5 выдаст сигнал Л в. блок управления 1. По этому сигналу блок управления 1 выдаст сигнал в блок хранения информации 6 на занесение информации, полученной на интервале ль At ty-t из блока сравнения 5. Сигнал С, вырабатываемый блоком управления 1, поступает в блоки приема информации 4 и блок сравнения 5 в соответствующие моменты времени и устанавливает их в исходное состояние. Прием информации в блоки приема 4 продолжается при открытии соответствующих элементов сравнения 3, и в дальнейшем в блоке сравнения 5 происходит сравнение измерений за интервалы времени ut лtдo следующего изменения знака приращения. При следующем изменении знака приращения блок сравнения 5 выдает сигнал В, поступающий в блок управления 1. Сигнал В будет выработан в момент времени At t ( . 1) . По сигналу В блок управления 1 разрешает занесение информации в блок хранения б из блока сравнения 5, полученной на интервале At 1, После поступления сигналов А и В в блок управления 1 на вход сумматора-делителя на два 7 поступает из блока управления сигнал о приеме и обработке информации, хранящейся в блоке хранения 6. Результатом измерения будет среднее арифметическое, полученное на интервале времени ut tl -t и At 44 3Работа устройства прекращается после поступления сигнала от путевого датчика 9. Смещение интервала измерения на величину ft-t/2 позволяет с большей точностью определять изменение знака приращения и повысить точность измерений на больших скоростях движения взвешиваемых объектов. Точность измерений зависит от веичины временного интервала д-i , от количества отработанных периодов по-/So4c r SrSe aeмых объектов. .«- увеличении °Р° зволит повысить р. ного устройства. формула изобретения ,,.ройство д;; -- Гт: со5ГржГ«ихся -Р- ° Г одключенный к одним иее датчик веса, д, ДРУГие входам элементов совпад и входы которых вход кото- г.яхг ..и„а„„, -„.L LUe .о:.о.. -0 ,„„ блоки прием. и«5°р ™„°;°;; входами блока f ому вхояУ Sr/SaSSrj ии,оро л а ен.,я..-Д,ГоГа -p- SrnSS -сдан cv«„. 1./-.,-„ „о ;яГкГП«..о 01 с /о2, 07.05.79 (прототип).
ni f fs tff7
Фаг. 2
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для взвешивания железнодорожных вагонов | 1980 |
|
SU938028A1 |
| Способ взвешивания быстродвижу-щиХСя Об'ЕКТОВ | 1979 |
|
SU851109A1 |
| Устройство для взвешивания транс-пОРТНыХ СРЕдСТВ | 1979 |
|
SU808865A1 |
| Способ взвешивания движущихся объектов | 1978 |
|
SU1002848A1 |
| Устройство для определения стадий плавления стали в дуговой трехфазной электропечи | 1984 |
|
SU1216836A1 |
| Аналого-цифровой фильтр | 1978 |
|
SU723585A1 |
| Устройство для определения стадий плавления шихты в дуговой трехфазной электропечи | 1985 |
|
SU1394474A1 |
| Устройство для определения электрической нагрузки | 1989 |
|
SU1698797A2 |
| Устройство диагностирования скважинных штанговых насосов | 1984 |
|
SU1245753A1 |
| Способ программного регулирования и устройство для его осуществления | 1987 |
|
SU1464147A1 |