Изобретени9 относится к весоизм рительной технике и предназначено для взвешивания движущихся объекто -железнодорожных вагонов, автомобилей и т.п. Известен способ измерения веса движущихся объектов методом скользящего интегрирования Cl. Однако весовые функции, соответ вукяцие этому методу, не являются оптимальными и не обеспечивают необходимой точности. Наиболее близким к изобретению по технической сущности является способ взвешивания движущихся объе тов путем интегрирования сигнала датчика веса в заданные одинаковые интервалы времени и сравнения смеж ных значений СЗ. Этот способ не обеспечивает бол шой точности измерения. Целью изобретения является повы шение точности взвешивания. Цель достигается тем, что измерения начинают в любой момент времени с начала поступления сигнала при сравнении запоминают значения измеренной величины перед каждым изменением знака приращения измеря емой величины, а за окончательной результат принимают среднее арифметическое запомненных результатов измерений. На фиг. 1 представлен график вы ходного сигнала датчика веса в зависимости от времени; на фиг. 2 устройство для реализации предлагаемого способа. Устройство содержит весовую плат форму ВП, блок 1 управления, датчик веса и путевые датчики ПД1 и ИД2.Да чик 2 веса подключен к входу блока приема информации, выход которого связан с входом блока 4 сравнения, выход которого в свою очередь связан с входом блока 5памяти, а выхо блока памяти подключен к сумматоруделителю 6. Блок 1 управления выдает Необходимую последовательность сигналов во времени для реализации способа взвешивания и на его вход включены путевые датчики ПД1 и ПД2 и блок 4 сравнения, а к выходу под1 лючены блоки З-б и все цепи С уста новки блоков устройства в исходное состояние. . Способ осуществляется следующим образом. При наезде на весовую платформу взвешиваемого объекта от датчиков 2 веса на вход блока 3 приема информа ции начинают поступать сигналы, содержащие информацию о весе движуще,гося оЬъекта: и низкочастотную гармо ническую . Одновременно с эти в блок 1 управления от путевого дат чика ПД1 прступает-сигнал о полном наезде взвешиваемого объекта на весовую платформу ВП. Предположим,- что измерение начинается в момент времени t фиг. 1 , а само измерение производят за интервал 4t t 2 - t. Интервал времени л t вырабатывает блок 1 управления. В течение этого времена осуществляется прием информации интегрирующим блоком 3. Результаты этого измерения запоминают в блоке 5. Следующее измерение производят за интервал , ив это же время осуществляется передача ранее принятой информации блоком 3 по команде блока 1 управления в блок 4 сравнения. В дальнейшем работа блока 3 по приему информации с выхода датчика 2 под управлением блока 1 и передаче ее в блок 4 сравнения повторяется. После передачи в блок 4 сравнения результатов двух первых измерений происходит определение знака приращения за интервалы времени Л1. Если приращение имеет положительный знак, выдается сигнал А в блок 1 управления. Блок 1 управления вырабатывается сигнал С, который первый результат, полученный за интервал времени 4t t, 2 t- сотрет, а второй запомнит для дальнейших сравнений. В ото же время производится следующее измерение за интервал времени t - э потом в блоке 4 сравнения происходит его сравнение с ранее полученным измерением за инт-ервал t - t у. Если приращение положительное, запоминают новое значение, и так дО изменения знака приращения. Например, на приведенной фиг. 1 кривой изменение знака приращения происходит на интервале t - ty. Б этом случае блок 4 сравнения выдает сигнал В в блок 1 управления и по его сигналу предыдущий результат измерения на интервале t 3 tX заносится в запоминающее устройство 5. Измерения продолжают до cлeдyкяue го изкюнения знака приращения. Результат измерения, предацествукюий следующему изменению знака приращения будет выдан блоком 4 сравнения в блок 5 памяти по сигналу блока 1 управления. После этого измерения прекращают и блок 1 управления выда ет сигнал на передачу содержащего блока 5 памяти в сумматор делитель б. Среднее арифметическое от двух полученных измерений принимают за окончательный результат. Работа устройства прекращается после поступления сигнала путевого датчика ПД2 Точность измерений зависит от величин временного интервала t и количества отработанных периодов помехи и дает удовлетворительные результаты при больших скоростях движения взвешиваемых объектов.
Для повышения точности измерений обработку результатов измерения можно провести после нескольких изменений знака прира|цения.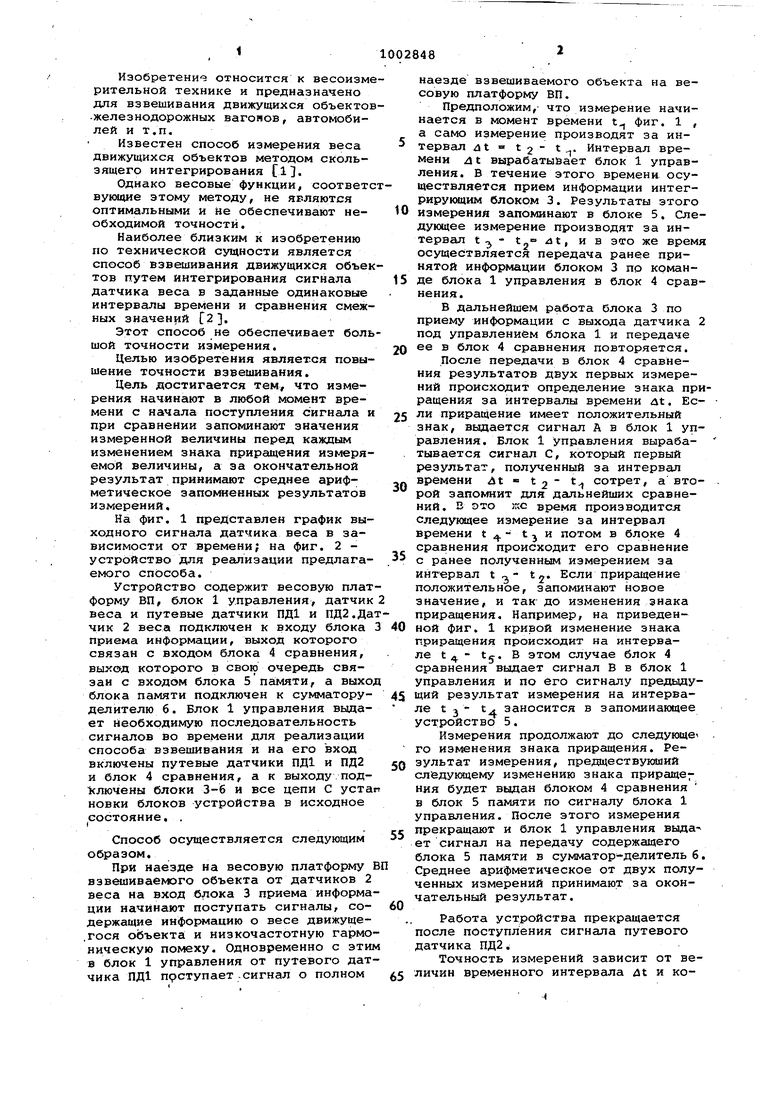
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для взвешивания железнодорожных вагонов | 1980 |
|
SU938028A1 |
| Способ взвешивания быстродвижу-щиХСя Об'ЕКТОВ | 1979 |
|
SU851109A1 |
| Устройство для взвешивания движущихсяТРАНСпОРТНыХ СРЕдСТВ | 1979 |
|
SU853410A1 |
| Микропроцессорная весоизмерительная система | 1981 |
|
SU1078255A1 |
| Устройство для поосного взвешивания подвижного состава | 1986 |
|
SU1315822A1 |
| Устройство для взвешивания транс-пОРТНыХ СРЕдСТВ | 1979 |
|
SU808865A1 |
| Устройство для поосного взвешивания железнодорожных вагонов | 1984 |
|
SU1224598A1 |
| Устройство для потележечного взвешивания железнодорожных вагонов в движении | 1984 |
|
SU1174771A1 |
| Способ взвешивания движущихся объектов | 1973 |
|
SU460451A1 |
| Способ взвешивания движущихся объектов | 1990 |
|
SU1732175A1 |
СПОСОВ ВЭВ1ШШВАННЯ ДВИЖ ЩХСЯ ОБЬЕКТОВ путем интегрирования сигвала датчика веса в заяаижяе одинаковые интервалы времени и сравнения сиежжю значений, о т л я ч а ющ и и с я тем что, с целью повьвцения точности вэв оивавия объектов, измерения иачннвцю в лквой 14омент врененй с ea4aJ «t поступления сягнгша и яри сргшнеййн эапоктнают значения lisiiiiepeHHotl величины перед изменением анака пр Ерацения измеряемой вел1{чн1ш, а да окончательный результат принимают среднее аркф «етйческое запомиениых результатов i измерений.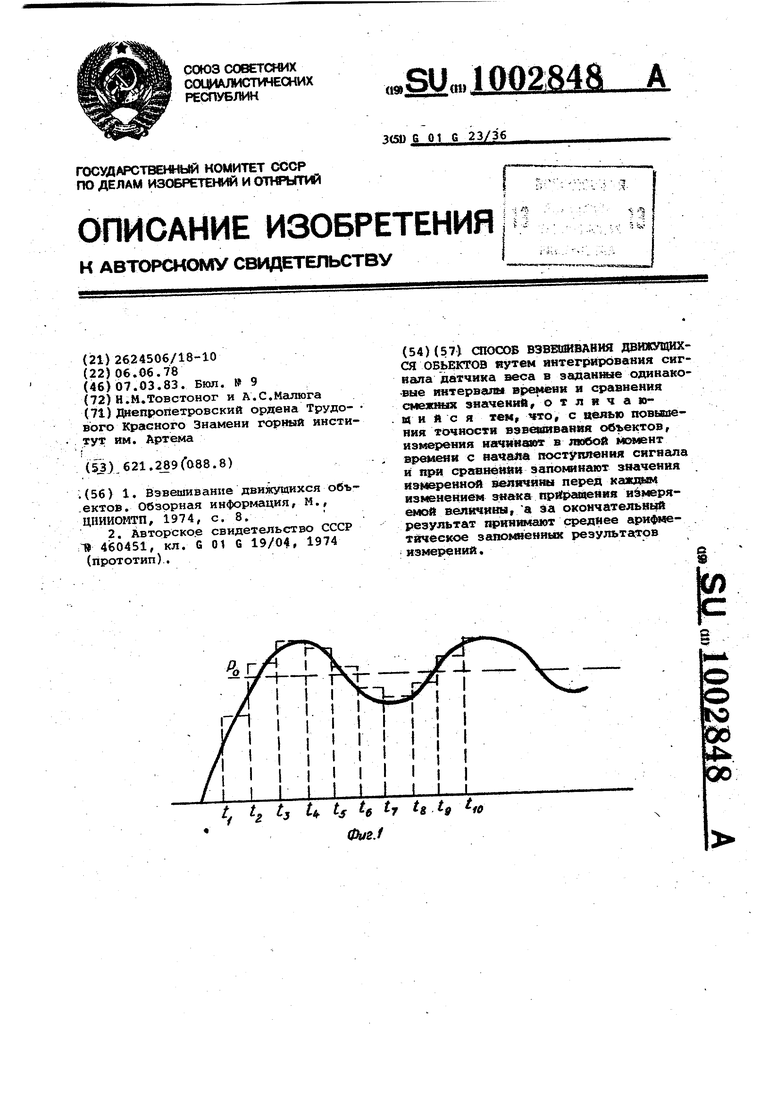
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Взвешивание движущихся объ.ектов | |||
| Обзорная информация, М., ЦНИИОМТП, 1974, с | |||
| Топка с несколькими решетками для твердого топлива | 1918 |
|
SU8A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Очаг для массовой варки пищи, выпечки хлеба и кипячения воды | 1921 |
|
SU4A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
