1
Изобретение относится к весоизмерительной технике, в частности, к устройствам пля взвешивания транспортных среаств, например, автомобилей.
Известно устройство цпя взвешивания движущихся объектов, содержащее грузоприемную платформу, опирающуюся на ча тотный датчик веса, схему совпадения, связанную с формирователем времени взвешивания и интегрирующим счетчиком li.
Кроме того., это устройство содержит генератор эталонной частоты и делители частоты, наличие которых обуславливает его сложность.
Ближайшим по технической сущности к предлагаемому является устройство ОЛЯ взвешивания транспортных средств, содержащее грузоприемную платформу с путевым выключателем и датчиком веса, выход которого соединен с первыми вход ми элементов совпадения, вторые входы которых соединены с выходами блока управления, а выходы элементов совпаде-
ння через линии задержки подключены к элементу ИЛИ, и интеграторС 3.
Недостатком этого устройства является неудовлетворительная точность, поскольку он не обеспечивает возможность выбора оптимальной весовой функции пря увеличении скорости движения объекта.
Цель изобретения - повышение точности взвешивания.
Поставленная цель достигается тем, что в устройство введены дополнительный путевой выключатель и ключ, првчем выход элемента ИЛИ подключен к одному входу ключа, другой вход которого соединен с блоком управления, а выход ключа подключен к интегратору, пря атом оба путевых выключателя подключены к блоку управления.
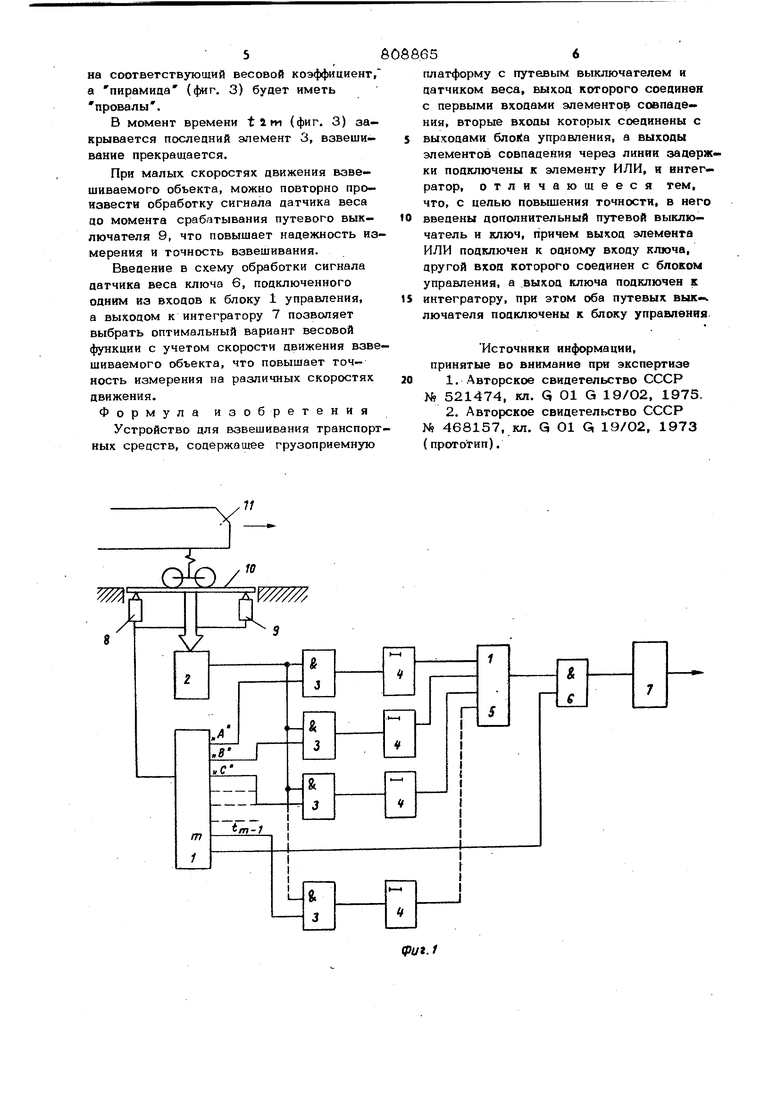
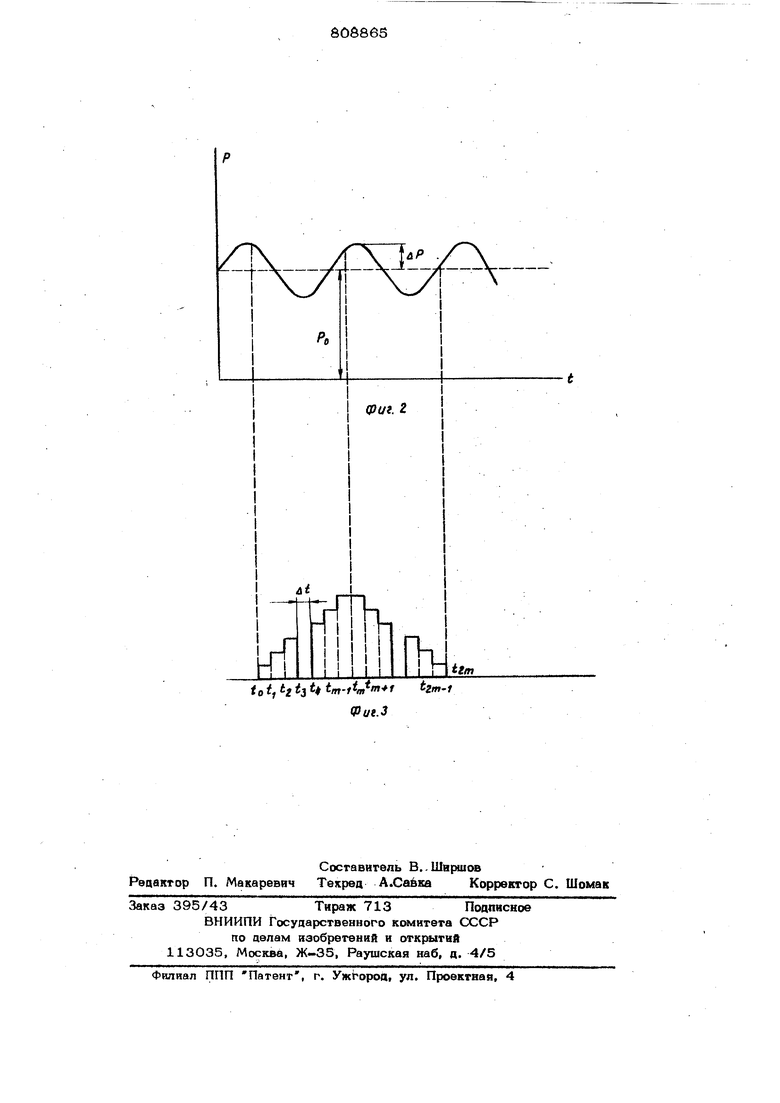
На фиг. 1 показана структурная схема устройства; на фиг. 2 - график измеряемого сигнала датчика веса; на фиГ. 3 - график, иллюстируюший вариант обработки сигнала датчика веса.
3 ,808865
Устройство (фиг. 1) содержит блок 1 управления, датчик 2 веса, элементы 3 совпацения, линии 4 задержки, элемент ИЛИ 5, ключ 6, например, в виде схемы совпадения, интегратор 7, путевой выклю чатель 8, дополнительный путевой выклю чатель 9, грузоприемную платформу 10. Устройство работает следующим обраОтрезок времени, в течение которого проводят взвешивание, разбивают на 2 Ml равных интервалов At (фиг. 2 и 3), причем интервал равен At t2 n-t2tti-l, т. е. первый t - tj , последний - tim Взвешиваемый объект наезжает на платформу 10. От датчика 2 веса на ВХ.ОД элементов 3 совпадения начинает поступать сигнал, содержащий информацию о весе движущегося объекта 11 и низкочастотную гармоническую помеху. При полном наезде объекта 11 на платформу 1О от,путевог-о выключателя 8 в блок 1 управления поступает сигнал. Блок 1 управления вырабатывает первый сигнал АГ, поступающий на вход элемента 3 совпадения и разрещающий поступление информации от датчика 2 веса на вход схемы 4 задержки, задержка которой равна нулю, и далее на вход элемента ИЛИ 5, а с выхода элемента ИЛИ 5 на вход ключа 6. Управляющий сигнал с блока 1 управления, поступающий на другой вход ключа 6 разрешает поступление информации на вход интегратора 7. Взвешивание начинается в момент времени to (фиг. 3). По истечении про межутка времени to 1 появляется сигнал на выходе В блока 1 управления, который поступает на вход следующего элемента И 3 совпадения (сигнал на выкопе А блока 1 управления при этом не снимается), который открывается и сигнал датчика 2 веса поступает через вторую линию 4 задержки на вход элемента ИЛИ 5, а дальше через откры тый ключ 6 на вход интегратора 7. Временные задержки линий 4 задерж ки выбраны так, чтобы сдвинуть во времени потоки импульсов, поступающих от датчика 2 веса по парпллельньп цепям к элементу ИЛИ 5 друг относитель но друга. Таким образом, после открывания эл монта 3 совпадения на вход интегратора 7 будут поступать от датчика 2 веса в течение времени t -, - t 2. (фиг. 3) в
два раза больше импульсов, чем поступило в течение времени t Q - t
В момент времени t 2. появится сигнал на следующем выходе С блока 1 управления, откроется следую здий эле мент 3 совпадения и в течение времени ± черзе ключ 6 на вход интеграторов 7 будет поступать утроенное количество импульсов датчика 2 веса. Работа блока 1 управления по выдаче управляющих сигналов на следующие элементы 3 совпадения, подключенные к соответствующим линиям 4 задержки повторяется довремени Ти/2, происходит после- довательное умножение сигнала датчика веса на весовой коэффициент, возрастающий по закону арифметической прогрессии и являющийся целым числом. Особенностью работы устройства является то, что например, в момент времени t 3 t блок 1 управления снимает разрешающий потенциал со вх:ода ключа 6 и на вход интегратора 7 не поступают сигналы от датчика 2 веса, умноженное на весовой коэффициент четыре. В момент времени i: блок 1 управления снова подает разрешающий потенциал на вход ключа 6 и сигнал от датчика 2 веса, умноженный на весовой коэффициент пять, поступает на вхоц блока 7 интегрирования. Блок 1 управления выдает сигналы в течение времени (ASTu-Atj-nqsTci-t-At), что позволяет умножить сигнал датчика 2 веса на максимальный весовой коэффициент (вершина пирамиды, фиг. 3), осуществив при помощи ключа 6 исключение умножения сигнала датчика на отдельный весовой коэффициент. Блок 1 управления по истечении времени (O,. ) начинает снимать управляющие сигналы с выхода, через равные промежутки времени д1 в прямой или обратной последовательности. Следовательно, в такой же последовательности начинают закрываться элементы 3 совпадения, что приводит к умножению сигнала датчика 2 веса на весовой коэффициент убывающий по закону арифметической прогрессии. В то же время, блок 1 управления снимает в соответствующий момент сигнал разрешения со входа ключа 6, что приводит к исключению из содержимого интегратора 7 сигнала датчика 2 веса, умноженного на соответствующий коэффициент. Такая работа блока 1 управления и ключа 6 приводит к тому, что из со- держимого интегратора 7 будет искпючей сигнал датчика 2 веса, умноженный
на соответствующий весовой коэффициент, а пирамида (фиг. 3) будет иметь провалы.
В момент времени t а «п (фиг. 3) закрывается последний элемент 3, взвешивание прекращается.
При малых скоростях движения взвешиваемого объекта, можно повторно произвести обработку сигнала датчика веса до момента срабатывания путевого выключателя 9, что повышает надежность измерения и точность взвещивания.
Введение в схему обработки сигнала датчика веса ключа 6, подключенного одним из входов к блоку 1 управления, а выходом к интегратору 7 позволяет выбрать оптимальный вариант весовой функции с учетом скорости движения взве шиваемого объекта, что повышает точность измерения на различных скоростях движения. Формула изобретения
Устройство для взвешивания транспорт ных средств, содержащее грузоприемную
088.656
платформу с путе1вым выключателем н датчиком веса, выход которого соецинен с первыми входами элементов совпадения, вторые входы которых соединены с S выходами бло1(а управления, а выходы элементов совпадения через линии задерж ки подключены к элементу ИЛИ, и интегратор, отличающееся тем, что, с целью повышения точности, в него 10 введены дополнительный путевой выключатель и ключ, причем выход элемента ИЛИ подключен к одному входу ключа, другой вход которого соединен с блоком управления, а выход ключа подключен к 15 интегратору, при этом оба путевых вык«ч лючателя подключены к блоку управления
Источники информации,
принятые во внимание при экспертизе 20 1. Авторское свидетельство СССР N9 521474, кл. Q 01 G 19/02, 1975.
2. Авторское свидетельство СССР № 468157, кл. Q 01 Q 19/02, 1973 (прототип).
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для взвешивания движущихсяТРАНСпОРТНыХ СРЕдСТВ | 1979 |
|
SU853410A1 |
| Устройство для взвешивания движущихся железнодорожных составов | 1982 |
|
SU1089427A1 |
| Устройство для автоматического поосного взвешивания объектов | 1983 |
|
SU1154544A1 |
| Устройство для взвешивания | 1976 |
|
SU657270A2 |
| УСТРОЙСТВО ДЛЯ ВЗВЕШИВАНИЯ ДВИЖУЩИХСЯ ОБЪЕКТОВ | 1994 |
|
RU2105270C1 |
| Способ взвешивания быстродвижу-щиХСя Об'ЕКТОВ | 1979 |
|
SU851109A1 |
| Автоматическая микропроцессорная весоизмерительная система | 1987 |
|
SU1566226A1 |
| Устройство взвешивания движущихся обьектов | 1973 |
|
SU468157A1 |
| Микропроцессорная весоизмерительная система | 1981 |
|
SU1078255A1 |
| Устройство для взвешивания движущихся объектов | 1987 |
|
SU1571408A1 |
11
а
10
/
й
WA
II . . . .
tzm-i Фиг.З
