(54) УСТРОЙСТВО ДЛЯ ВЗВЕШИВАНИЯ ЖЕЛЕЗНОДОРОЖНЫХ ВАГОНОВ
| название | год | авторы | номер документа |
|---|---|---|---|
| Микропроцессорная весоизмерительная система | 1981 |
|
SU1078255A1 |
| Устройство для взвешивания движущихся объектов | 1987 |
|
SU1571408A1 |
| Способ взвешивания быстродвижу-щиХСя Об'ЕКТОВ | 1979 |
|
SU851109A1 |
| Устройство для взвешивания движущихсяТРАНСпОРТНыХ СРЕдСТВ | 1979 |
|
SU853410A1 |
| Способ взвешивания движущихся объектов | 1978 |
|
SU1002848A1 |
| УСТРОЙСТВО ДЛЯ ВЗВЕШИВАНИЯ ДВИЖУЩИХСЯ ОБЪЕКТОВ | 1994 |
|
RU2105270C1 |
| Устройство для взвешивания движущихся объектов | 1987 |
|
SU1571414A1 |
| Устройство для взвешивания движущихся объектов | 1989 |
|
SU1691689A1 |
| Конвейерные весы | 1987 |
|
SU1569574A1 |
| Автоматическая микропроцессорная весоизмерительная система | 1987 |
|
SU1566226A1 |
1
Изобретение относится к весоизмерительной технике и предназначено для взвешивания движущихся х елезнодорожных вагонов.
Известен способ взвешивания движущихся объектов путем интегрирования сигнала датчика веса с произвольного момента времени, когда до конца измерений остается интервал времени, не меньший периода низко- )Q частотной гармонической помехи. При этом через одинаковые интервалы времени производят последовательные сравнения двух смежных изменений, начинающихся с начала первого поло- 15 жительного полупериода, а заканчивающихся с заданным интервалом времени, и выбирают наименьшее значение из всех произведенных измерений в качестве результата взвешивания .Ij.
Способ не обеспечивает требуемую точность взвешивания, зависящую от периода базовой частоты помехи.
Наиболее близким к предлагаемому по технической сущности является устройство для взвешивания железнодорожных вагонов, содержащее датчик веса, включенный на первые входы элементов совпадения, путевые датчики, блок приема информации L.
Недостатком устройства является сравнительно низкая точность измерения, связанная с тем, что устройство рассчитано на определеняой диапазон скоростей движения состава.
Цель изобретения - повышение точности измерения.
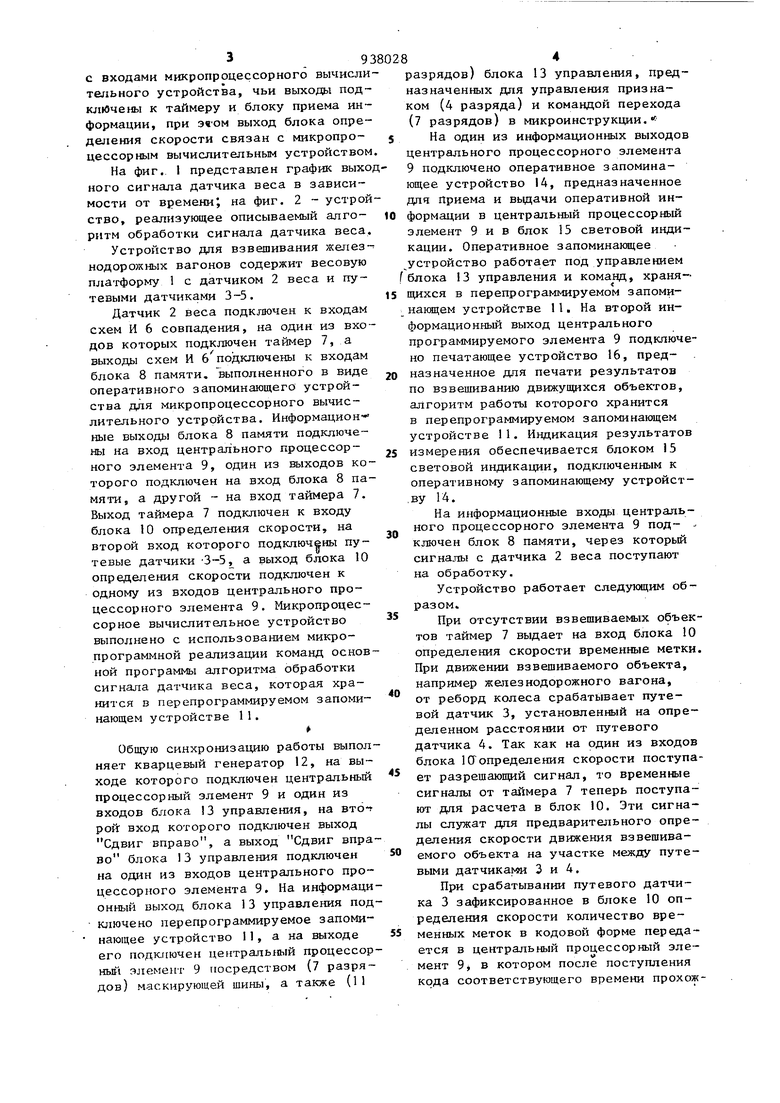
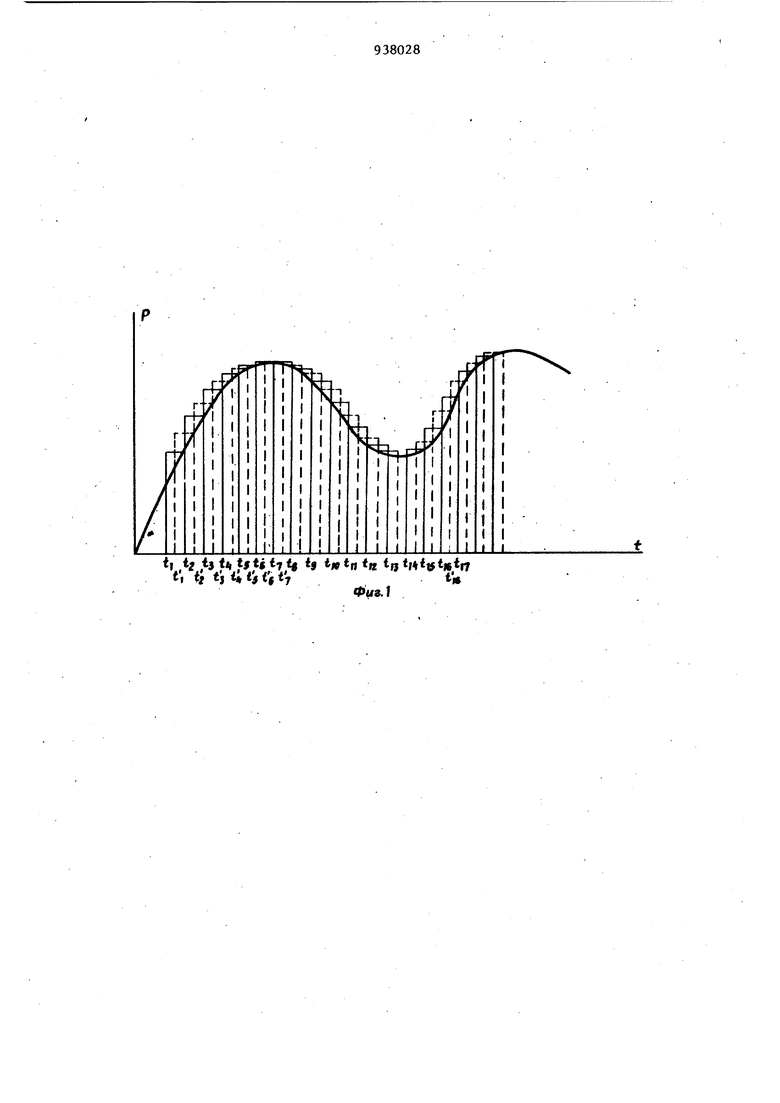
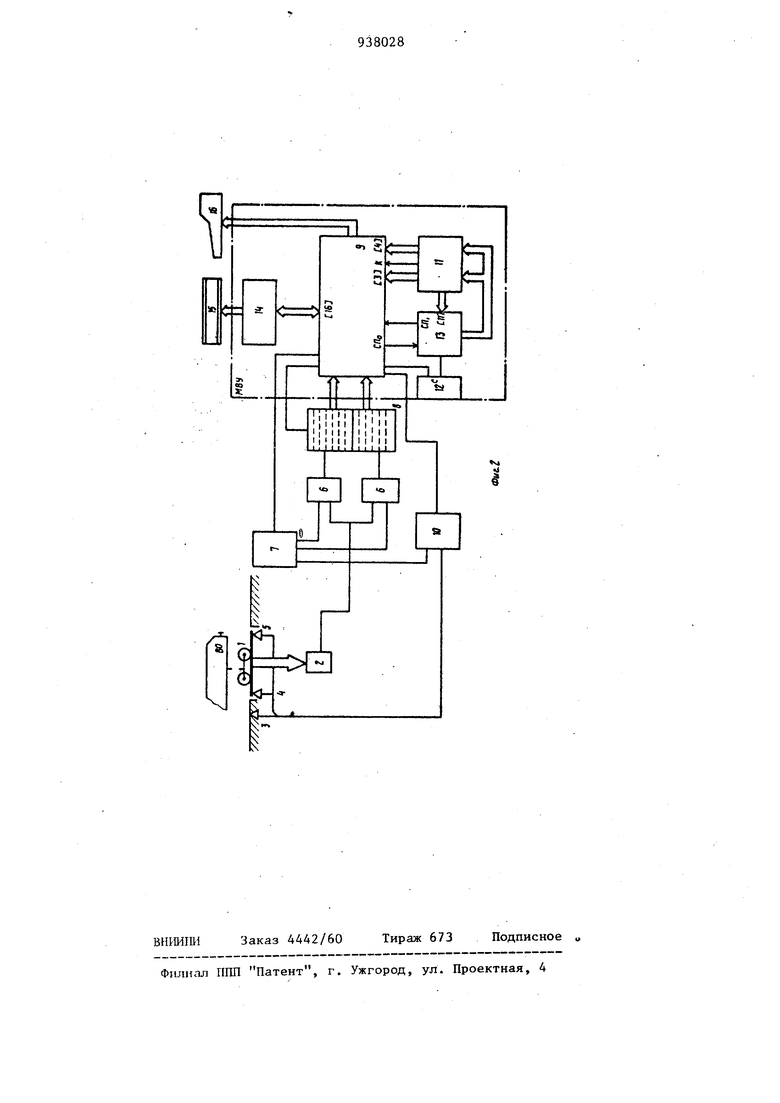
Для достижения поставленной цели в устройство введены блок определения скорости, таймер и микропроцессс)ное вычислительное устройство, причем путевые датчики включеньт на вход блока определения скорости, на другой вход которого включен таймер, выход которого связан с вторыми входами схем совпадения, выходы которых через-блок приема информации связагел с входами микропроцессорного вычисли тельного устройства, чьи выходы под кдйчены к таймеру и блоку приема ин формации, при эчом выход блока опре деления скорости связан с микропроцессорным вычислительным устройством На фиг. I представлен график вых ного сигнала датчика веса в зависимости от времениj на фиг. 2 - устрой ство, реализующее описываемый алгоритм обработки сигнала датчика веса Устройство для взвешивания желез нодорожных вагонов содержит весовую платформу 1 с датчиком 2 веса и путевыми датчиками 3-5. Датчик 2 веса подключен к входам схем И 6 совпадения, на один из вхо дов которых подключен таймер 7, а выходы схем И 6 подключены к входам блока 8 памяти, выполненного в виде оперативного запоминающего устройства для микропроцессорного вычислительного устройства, Информацион- ные выходы блока 8 памяти подключены на вход центрального процессорного элемента 9, один из выходов которого подключен на вход блока 8 памяти, а другой - на вход таймера 7, Выход таймера 7 подключен к входу блока 10 определения скорости, на второй вход которого подключены путевые датчики -3-5, а выход блока 10 определения скорости подключен к одному из входов центрального процессорного элемента 9, Микропроцессорное вычислительное устройство выполнено с использованием микропрограммной реализации команд основ ной программы алгоритма обработки сигнала датчика веса, которая хранится в перепрограммируемом запоминающем устройстве 11, Общую синхронизацию работы выполняет кварцевый генератор 12, на выходе которого подключен центральный процессорный элемент 9 и один из входов блока 3 управления, на вто-г рой вход которого подключен выход Сдвиг вправо, а выход Сдвиг вправо блока 13 управления подключен на один из входов центрального процессорного элемента 9. На информационный выход блока 13 управления подключено перепрограммируемое запоминающее устройство 11, а на выходе его подключен центральный процессорньй элемент 9 посредством (7 разрядов) маскирующей шины, а также (11 разрядов) блока 13 управления, предназначенных для управления признаком (4 разряда) и командой перехода (7 разрядов) а микроинструкции. На один из информационных выходов центрального процессорного элемента 9 подключено оперативное запоминающее устройство 14, предназначенное дпя Приема и вьщачи оперативной информации в центральный процессорный элемент 9 и в блок 15 световой индикации. Оперативное запоминаклцее устройство работает под управлением блока 13 управления и комацц, храня- щихся в перепрограммируемом запоминагацем устройстве П. На второй информационный выход центрального программируемого элемента 9 подключено печатающее устройство 16, предназначенное для печати результатов по взвешиванию движущихся объектов, алгоритм работы которого хранится в перепрограммируемом запоминающем устройстве 11, Индикация результатов измерения обеспечивается блоком 15 световой индикации, подключенным к оперативному запоминающему устройству Г4, На информационные входы центрального процессорного элемента 9 под- ключен блок 8 памяти, через который сигналы с датчика 2 веса поступают на обработку. Устройство работает следующим образом. При отсутствии взвешиваемых объектов таймер 7 выдает на вход блока 10 определения скорости временные метки. При движении взвешиваемого объекта, например железнодорожного вагона, от реборд колеса срабатывает путевой датчик 3, установленный на определенном расстоянии от путевого датчика 4, Так как на один из входов блока 10 определения скорости поступает разрешающий сигнал, то временные сигналы от таймера 7 теперь поступают для расчета в блок 10. Эти сигналы служат дпя предварительного определения скорости движения взвешиваемого объекта на участке между путевыми датчиками 3 и 4. При срабатывании путевого датчика 3 зафиксированное в блоке 10 определения скорости количество временных меток в кодовой форме передается в центральный процессорный элемент 9j в котором после поступления кода соответствующего времени прохождения контрольного участка движу1щимся объектом по сигналам с кварц вого генератора 12 произойдет выбо ка первой команды из перепрограмми руемого запоминающего устройства 1 по адоесу, указанному блоком 13 уп ления. Под воздействием этих коман и анализа их выполнения блоком 13 управления производится анализ ско рости движения взвешиваемого объек та. Определение скорости и анализ ее позволяет выработать необходимы оптимальный интервал времени, в те чение которого производится измерение сигнала датчика 2 веса. Посл анализа скорости движения централь ный процессорный элемент 9 по шине управления выдает код в таймер 7, по которому и устанавливается длительность интервала измерения At. Предположим, что сигнал от датчика 3 поступает в момент времени t (фиг. О, измерение производитс за интервал времени, равный d t t Этот интервал времени вырабатывает таймер 7 по коду, поступающему от центрального процессорного элемент 9, и выдает его на вход одной из схем И 6 совпадения. В то же время в блок 8 памяти поступает сигнал на nprfeM информации от датчика 2 веса через открытый элемент схемы И 6 совпадения. В момент времени tjj таймер 7 открывает следующий элемент схемы И 6 совпадений и на вход блока 8 памяти поступает информация от датчика веса за интервал времени At to-t), pasHbul t, но сдвинутый по отношению первого интервала на величину At/2. Информация, поступившая за интервал ivt и At заносится в различные ячейки блока 8 памяти, построенного по магазинному типу т.е. при поступлении следующих порций информации, ранее поступившая за интервал t информация сдвигается в следующую ячейку, освобож;5ая первую для приема последующей. Например, в момент времени t происходит перезапись ранее записанной информации за время , после чего в первую ячейку блока 8 памяти опять осуществляется передача информации от датчика2 веса-за время ,-t2. Аналогичным образом происходит перезапись информации в момент времерш t.. В дальнейшем при емом и перезаписью информации управля ет таймер 7. После приема информации на промежутке и At выполняется сравнения первых двух измерений. Происходит определение приращения измеряемой величины. Если, приращение имеет положительный знак, результат первого измёрения стирается, а результат второго измерения остается для дальнейшего сравнения в центральном процессорном элементе 9. В дальнейшем происходит следующее сравнение измерений, полученных на интервалах времени H( -t и определение знака приращения. В нашем случае для дальнейшего сравнения остается тот результат измерения у которого знак приращения положительный. Сравнение выполняется до тех пор, пока приращение не изменяет свой i знак на противоположный. Например, изменение знака происходит на интервале л t tL-tl (фиг. 1) . Сигнал об изменении знака обеспечивает занесение информации, полученной на интервале At . ty-t, в оперативное запоминающее устройство 14. Операция сравнения осуществляется в дальнейшем до определения следующего изменения знака приращения, в нашем случае это происходит на интервале л .-t,- (фиг. l). После определения первого изменения знака приращения на интервале , данное измерение заносится в оперативное запоминающее устройство 14. В дальнейшем все измерения, которые осуществляются до определения изменения следующего знака приращения, заносятся в это запоминающее устройство т.е. в нашем случае заносятся все измерения в промежутке . При дальнейшей работе центральный процессорный элемент 9 определяет следуюцц е моменты изменения знака приращения и все измерения заносятся в оперативное запоминающее устройство 14. Прием информации прекращается в момент выдачи сигнала путевого датчика 4, что означает конец приема информации от датчика 2 веса. По сигналу блока 10 скорости центральный процессорный элемент выдает сигнал таймеру 7 и он прекращает вы7 . 9 дачу управляющих интервалов t на схемы И 6 совпадения. При записи информации в оператив ное запоминающее устройство 14, указ вающей на изменение знака приращени заносится дополнительный код, указы вающий какое было изменение знака, т.е. с положительного на отрицатель ный или наоборот. В дальнейшем определяется количество изменений знака приращения т.е. сколько периодов помех при дан ной скорости обработано. После определения количества пер дов производится сложение полученных измерений и деление результата на время измерений. Полученный результат соответствует весу движущегося объекта. Центральное процессорное устройство 9 этот результат выдает в оперативное запоминающее устройство 14, где он индицируется с помощью световой индикации, а также отпечатывается с помощью печатающего устройства 16. После печати измеренного веса работа устройства прекращается и оно переходит в режим охшдания. Смещение интервала измерения на ве тичину Д1/2 позволяет с бойьщой точностью определить изменение знака приращения и повысить точность измерений на больших скоростях движения .взвешиваемых объектов. Предварительное определение скорости взвешиваемого объекта позволя ет выбрать оптимальную величину интервала измерения At, что позволяет получать удовлетворительную точность и на больших скоростях движения взвешиваемых объектов. Точность измеренш зависит от ве личины временного интервала t, который можно менять, от количества отработанных периодов помехи, так как происходит усреднение измерений при возрастании количества периодов По предварительным расчетам точность измерениГ устройства возрастет не менее чем в 2 раза при скорости движения взвешиваемых объекто в диапазоне 7-10 км/ч. Точность измерений останется также удовлетворительной при увеличении скорости движения до 15 км/ч. Выполнение предлагаемого устройства на базе микропроцессорного набора позволит производить его программирование без замены самой электронной схемы, что снизит затраты на разработку устройства для данной цепи. Повьшение точности измерения при увеличении скорости движения взвешиваемых объектов, использование универсальных микропроцессорных устройств позволит пошз1сить пропускную способность весоизмерительного устройства и снизить затраты на его разработку. Формула изобретения Устройство для взвешивания железнодорожных вагонов, содержащее датчик веса, включенный на первые входы элементов совпад-ения, путевые датчики, блок приема информации, отличающееся тем, что, с целью повьшхегшя точности измере,ния, в него введены блок опредепе- . НИН скорости, таймер и микропроцесcopHoe вычислительное устройство, причем путевые датчики включены на вход блока определения скорости, на другой вход которого включен таймер, выход которого связан с вторыми входами схем совпадения, выходы которых через блок приема информации связаны с входами микропроцессорного вычислительного устройства, чьи выходы подключены к таймеру и блоку приема информации, при этом выход блока определения скорости связан с микропроцессорным вычислительным устройством. Источники информации, принятые во внимание при экспертизе 1.Авторское свидетельство СССР по заявке № 2624506/18-10, кл. G 01 G 19/02, 1978. 2.Авторское свидетельство СССР по.заявке № 2777543/18-10, кл. G 01 G 19702, 07.06.79 (прототип) ,
.VVWA «
t, t; t) i« tj (f
Фиг.
