(54) СПОСОБ ВЗВЕиШВАНИЯ БЫСТРОДВШУЩИХСЯ Изобретение относится к весоизме рительной технике и предназначено для взвешивания быстродвижущихся объектов - автомобилей, железнодорож ных вагонов и т.д. Известен способ взвепшва.ния быст;родвижущихся объектов, заключающийся .в том, что пропорциональный измеряемому весу сигнал весового устройства преобразуют в электрический сигнал и усредняют его во времени. С целью уменьшения влияния динамических по мех определяют среднее значение четырех интегральных сумм одинаков9Й длительности, равной величине г аряд; ка длительности одного периода колебаний вблизи первой границы частотного диапазона подавляемых помех, см щают начальную точку интегрирования каждой интегральной cyMhoi на половин периода колебаний вблизи второй гра ницы указанного диапазоиа и смещают начало интегральных сумм на половину oiJbEKTOB периода колебаний, лежащего в середине частотного диапазона fIJ. Известный способ не обеспечивает достаточное подавление динамической помехи, содержащейся в основном сигнале , и не дает удовлетворительную точность с увеличением скорости движения движущихся объектов. Наиболее близким по технической сущности к предлагаемому является способ взвешивания движущихся объектов путем интегрирования сигнала датчика веса в заданные одинаковые интервалы времени и сравнения соседних значений с выбором общего времени измерения и количества заданных интервалов времени по скорости движения объекта, причем измерение начинают в ашбой произвольный момент времени с начала поступления сигнала датчика веса L2.. Недостатком способа является то, чтр он не обеспечивает требуемую точасть взвеошвания при малом времени звешивания и не дает удовлетвориельные результаты при обработке сигнала датчика веса;,-содержащего низкоастотную гармоническую помеху.
Цель изобретения - повышение точности взвешивания движувщхся объектов в широком диапазоне скоростей.
Посуавленная цель достигается тем, что каждый раз в момент начала интервала интегрирования измеряют значение величины уровня входного сигнала а сигналы, значения которых отличаются на величину большую, чем заданная не учитывают, причем заданную величину устанавливают прямо пропорционально скорости движения объекта, определяют посредством быстрого преобразования Фурье амплитудно-частотную характеристику сигнала, по постоянной составляницей которого судят о весе объекта.
Измерения начинают в любой момент времени с начала поступления сигнала с датчика веса, содержащего основной сигнал и динамическую помеху, изменяющуюся как по гармоническому закону, так иопо закону, значительно отличающемуся от гармонического, через равные интервалы времени , начало которых служит, также определению величины уровня входного сигнала, а полученные значения измерений за время At и величины уровней сигнала в строгом временном соответствии размещаются в запоминающем устройстве. В дальнейшем с учетом скорости движения взвешиваемого объекта полученные измерения обрабатываются программным микропроцессорным устройством по программе быстрого преобразования Фурье с получением амплитудно-частотной характеристики сигнала и выделением постоянной составляющей, соответствукядей весу движущегося объекта.
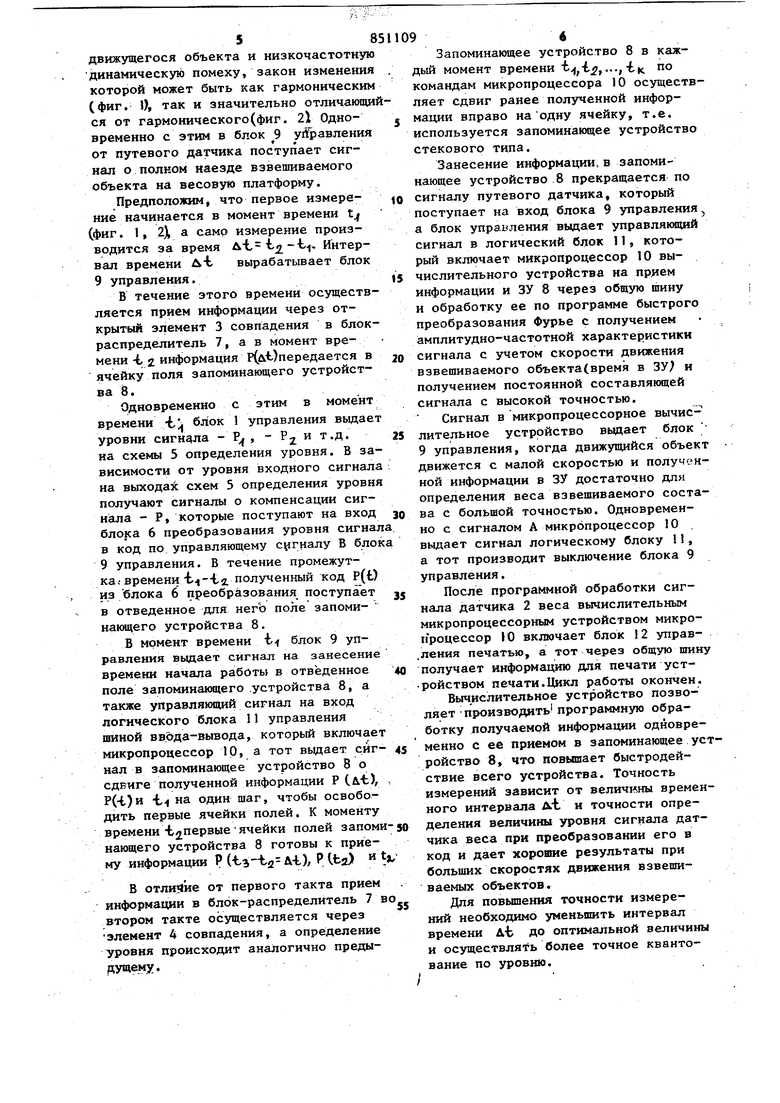
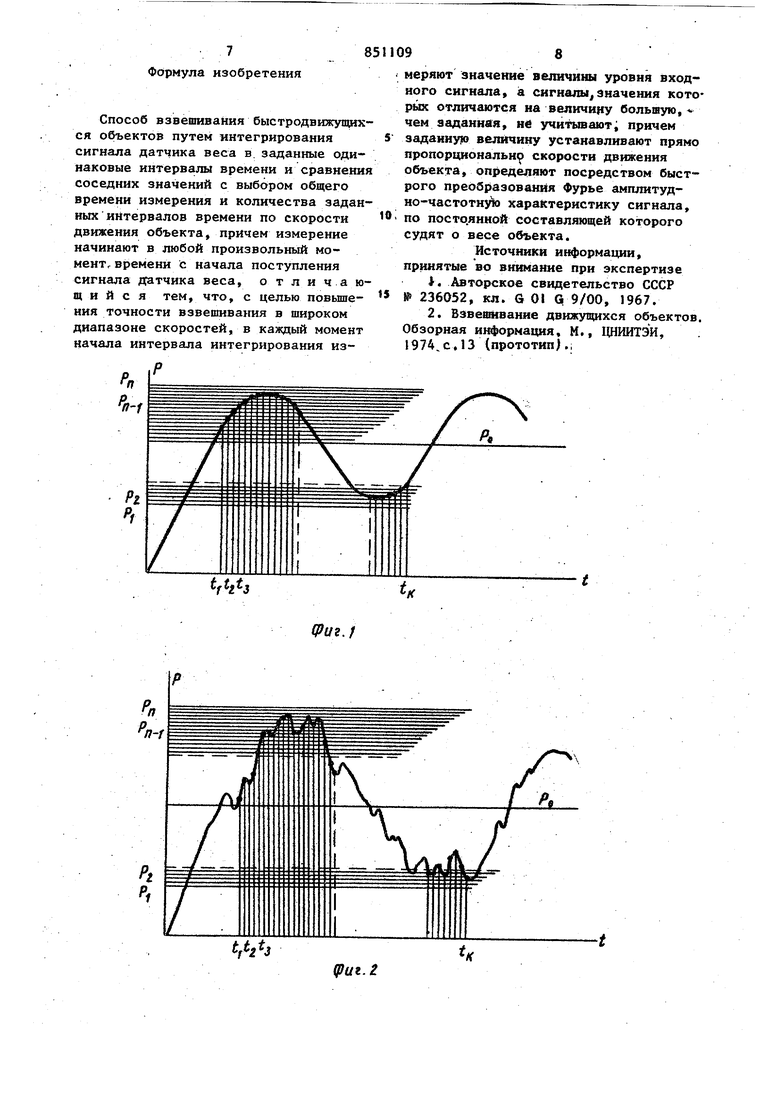
На фиг. i представлен график выходного сигнала датчика веса в зависимости от времени, изменяющийся по гармоническому закону; на фиг. 2 график выходного сигнала датчика веса в зависимости от времени, изменяющийся по закону, отличающемуся от гармонического; на фиг. 3 - устройство для реализации предлагаемого способа.
Устройство содержит весовую платформу 1 с датчиком 2 веса и путевьми датчиками. Датчик 2 веса подключен ко входу элементов 3 и 4 совпадения
.и иа входы схем 5 определения сигнала (квантования по уровню), выходы которых подключены к блоку 6 преобразования уровня в код. Выходы элементов 3 и 4 совпадения подключены на вход блока 7 распределения, выход. которого подключен к упорядоченному полю запоминающего устройства 8. На вторые входы элементов 3 и 4 совпадения подключен блок 9 управления устройства. Блок 9 управления устройства вьщает необходимую во времени последовательность сигналов и уровней для определения уровня
5 входного сигнала датчика 2 веса, поступающего на схемы 5 определения уровня.На блока 9 управления устройг ,ства подключены путевые датчики, а также микроп;роцессор 10 вычислительного
0 устройства при помощи шинь А. Выход В блока 9 управления устройства подключен на вход блока 6 преобразования уровня сигналадатчика 2 веса в соответствующий код. Один из выходов блока управления подключен к одному из полей запоминающего устройства 8, а Другой подключен шиной передачи и приёма сигналов к логическому блоку I1 управления. Выходы схем 5 определения уровня подключены к блоку 6 преобразования уровня сигнала в код, выход которого подключен к одному из полей запоминающего устройства 8,
На Юдин из входов запоминающего устройства 8 поступают управляющие сигналы выборки от микропроцессора 10, а шина вьщачи.информации запоминакяцего устройства 8 подключена на общую шину ввода-вывода вычислительного устройства. Логический блок 11 управления общей шины управляется микропроцессором 10 и выдает управляющие сигналы. К общей шине микропроцессор 10 подключен шиной прие5 ма-передачи И1формации. Микропроцессор 10 имеет также уцравляющую связь с блоком 12 управления печатью, который подключен в свою очередь информационной шииой к общей пшне и к устройству печати. Способ ос ествляется следующим образом.
При иаезде на весовую платформу взвешиваемого объекта от датчика 5 2 веса на вход элементов 3 и 4 совпадения а также на схемы 5 определения уровня начинают поступать сигналы, содержа цие,.11нформацию о весе 58 движущегося объекта и низкочастотную динаъшческую помеху, закон изменения которой может быть как гармоническим (фиг. 1), так и значительно отличающи ся от гармонического(фиг. 2V Одновременно с этим в блок 9 управления от путевого датчика поступает сигнал о полном наезде взвешиваемого объекта на весовую платформу. Предположим, что первое измерение начинается в момент времени t (фиг. 1, 2 а само измерение производится за время 4, t. Интервал времени ЛЬ вырабатывает блок 9 управления. В течение этого времени осуществляется прием информации через открытый элемент 3 совпадения в блокраспределитель 7, а в момент времени-t 2 информация Р(сЛ.)передается в ячейку поля запоминающего устройства 8. Одновременно с этим в момент времени -i блок 1 управления вьщает уровни сигнала - Р Р и т.д. на схемы 5 определения уровня. В зависимости от уровня входного сигнала на выхода схем 5 определения уровня получают сигналы о компенсации сигиала - Р, которые поступают на вход бло|са 6 преобразования уровня сигнал в код по управляющему сугналу В блок 9 управления. В течение промежутка времениЧч-Ьа. полученный код P(t) из блока 6 преобразования поступает в отведенное для него поле запоминающего устройства 8, В момент времени i. блок 9 управления выдает сигнал на занесение времени начала работы в отведенное поле запоминакицего .устройства 8, а также управляющий сигнал на вход логического блока 11 управления шиной ввода-вывода, которьй включает микропроцессор Ш а тот вь1дает сигнал в запоминающее устройство 8 о сдниге полученной информации Р(&t), Р(Ч-)и -t на один шаг, чтобы освободить первые ячейки полей. К моменту времени Ь2первыеячейки полей запоми нающего устройства 8 готовы к приему информации Р (-ti-tg: Л-t), РДЬа) V В отли ие от первого такта прием информации в блок-распределитель 7 во втором такте осуществляется через элемент 4 совпадения, а определение уровня происходит аналогично предыдущему. 9 Запоминающее устройство 8 в каждый момент времени ,-tf,,..,-t по командам мнкропроцессора 10 осуществляет сдвиг ранее полученной информации вправо на одну ячейку, т.е. используется запоминающее устройство стекового типа. Занесение информации, в запоминающее устройство 8 прекращается по сигналу путевого датчика, который поступает на вход блока 9 управления,, а блок управления выдает управляющий сигнал в логический блок 11, который включает микропроцессор 10 вычислительного устройства на прием информации и ЗУ 8 через общую шину и обработку ее по программе быстрого преобразования Фурье с получением амплитудно-частотной характеристики сигнала с учетом скорости движения взвешиваемого объекта(время в ЗУ) и получением постоянной составляющей сигнала с высокой точностью, Сигнал в микропроцессорное вычислительное устройство вьщает блок 9 управления, когда движущийся объект движется с малой скоростью и полученной информации в ЗУ достаточно для определения веса взвешиваемого состава с большой точностью. Одновременно с сигналом А микропроцессор 10 выдает сигнал логическому блоку 1I, а тот производит выключение блока 9 управления. После программной обработки сигнала датчика 2 веса вычислительным микропроцессорным устройством микропроцессор 10 включает блок 12 управления печатью, а тот через общую шину получает информацию для печати устойством печати.Цикл работы окончен. Вычислительное устройство позволяет Производить программную обработку получаемой информации одновременно с ее приемом в запоминающее устройство 8, что повышает быстродействие всего устройства. Точность измерений зависит от величины временного интервала Л-Ь и точности определения величины уровня сигнала датчика веса при преобразовании его в Я хороиие результаты при больших скоростях движения взвешиваемых объектов. Для повышения точности измерений необходимо уменьпють интервал времени ДЪ до оптимальной величины и осуществлять более точное квантование по уровню.
Формула изобретения
Способ взвешивания быстродвижущихся объектов путем интегрирования сигнала датчика веса в. заданные одинаковые интервалы времени и сравнения соседних значений с выбором общего времени измерения и количества заданных интервалов времени по скорости движения объекта, причем измерение начинают в любой произвольный момент, времени с начала поступления сигнала датчика веса, отличающийся тем, что, с целью повышения точности взвешивания в широком диапазоне скоростей, в каждый момент начала интервала интегрирования измеряют значение величины уровня входного сигнала, а сигнашл значения которых отличаются на величину большую,« чем заданная, учитывают; причем
заданную величину устанавливают прямо пропорциональна скорости движения объекта, определяют посредством быстрого преобразования Фурье амплитудно-частотнуто характеристику сигнала,
по постоянной составляющей которого судят о весе объекта.
Источники информации, принятые во внимание при зкспертизе
1.JU9TopcKoe свидетельство СССР 236052, кл. GDI Q 9/00, 1967.
2.Взвешивание движущихся объектов. Обзорная информация, М., 1ШИИТЭИ, 1974.с, 13 (прототип).;
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для взвешивания железнодорожных вагонов | 1980 |
|
SU938028A1 |
| Устройство для взвешивания транс-пОРТНыХ СРЕдСТВ | 1979 |
|
SU808865A1 |
| Устройство для взвешивания движущихсяТРАНСпОРТНыХ СРЕдСТВ | 1979 |
|
SU853410A1 |
| Способ взвешивания движущихся объектов | 1978 |
|
SU1002848A1 |
| Способ взвешивания движущихся объектов | 1973 |
|
SU460451A1 |
| Автоматическая микропроцессорная весоизмерительная система | 1987 |
|
SU1566226A1 |
| Микропроцессорная весоизмерительная система | 1981 |
|
SU1078255A1 |
| Способ взвешивания движущихся объектов | 1990 |
|
SU1732175A1 |
| Способ поколесного взвешивания подвижных объектов | 1990 |
|
SU1781553A1 |
| МАССОМЕТРИЧЕСКИЙ СПОСОБ АВТОМАТИЧЕСКОГО ОПРЕДЕЛЕНИЯ ВЕСА ГРУЗА И УСТРОЙСТВО ЕГО РЕАЛИЗАЦИИ | 1999 |
|
RU2148800C1 |
PI
Л
