154) УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ИСПОЛНИТЕЛЬНЫМ
МЕХАНИЗМОМ
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для загрузки бункеров топливоподач электростанций | 1982 |
|
SU1041448A1 |
| СТАБИЛИЗАТОР ПЕРЕМЕННОГО НАПРЯЖЕНИЯ | 2004 |
|
RU2274890C1 |
| Устройство дистанционного управления | 1988 |
|
SU1564670A1 |
| УСТРОЙСТВО ДЛЯ ЗАЩИТНОГО ОТКЛЮЧЕНИЯ В ЭЛЕКТРИЧЕСКОЙ СЕТИ С ЗАЗЕМЛЕННОЙ НЕЙТРАЛЬЮ (ВАРИАНТЫ) | 2006 |
|
RU2319269C1 |
| Способ управления приводом регулирующего органа ядерного реактора и устройство для его осуществления | 1990 |
|
SU1785043A1 |
| Устройство обнаружения сигналов ядерного квадрупольного резонанса | 2021 |
|
RU2774310C1 |
| Устройство обнаружения сигналов ядерного квадрупольного резонанса | 2023 |
|
RU2825221C1 |
| Устройство обнаружения сигналов ядерного квадрупольного резонанса | 2022 |
|
RU2791148C1 |
| ПРЕОБРАЗОВАТЕЛЬ ПОСТОЯННОГО НАПРЯЖЕНИЯ В ПОСТОЯННОЕ | 1995 |
|
RU2094936C1 |
| ПРЕОБРАЗОВАТЕЛЬ ИНЕРЦИАЛЬНОЙ ИНФОРМАЦИИ | 2006 |
|
RU2325620C2 |
. t ,
Изобретение относится к автоматике и предназначено для автоматизации технологических процессов в различных отраслях промышленности,
Известно устройство для управления исполнительньви механизмом, содержащее ключевые элементы, блоки управления, логические элементы, асинхронный двигатель 1.
Наиболее близким по технической сущности к предлагаемому является устройство, содержащее источник переменного напряжения, задатчик направления перемещения исполнительного механизма, асинхронный двигатель, первый, второй и третий выводы обмотки управления которого соединены соответственно с выходами первого, второго и третьего ключевых элементов, а вал кинематически через редуктор с исполнительным механизмом и блоком ограничения хода исполнительного механизма, четвертый и пятый ключевые элементы, выходы которых соединены соответственно с выходами второго и третьего ключевых элементов, а первые входы первого, второго и пятого, третьего и четверто- го ключевых элементов соединены соответственно с первым, вторым и третьим выводами трехфазного источника питания 2.
Недостатком известных устройств является малая надежность.
Цель изобретения - повышение надежности устройства.
Эта цель достигается тем, что в известное устройство для управления исполнительньгм механизмом введены шестой, седьмой, восьмой и девятый ключевые элементы, первый и второй трансформаторы, первичные обмотки которых соединены с источником переменного напряжения и соответственно с выходами шестого и седьмого ключевых элементов, вторичные обмотки первого трансформатора - со вторыми входами первого, второго и третьего ключевых элементов, а вторичные обмотки второго трансформатора - со вторыми входами первого, четвертого и пятого ключевых элементов, первые входы шестого и сеДьмого ключевых элементов подключены к одному выводу источника переменного напряжения, а вторые входы - соответственно к выходам восьмого и девятого ключевых элементов, первые входы которых соединены с первым и вторым выходами блока ограничения хода исполнительного механизма, а
вторые входы - с первым и вторым выходами задатчика направления перемещения исполнительного механизма.
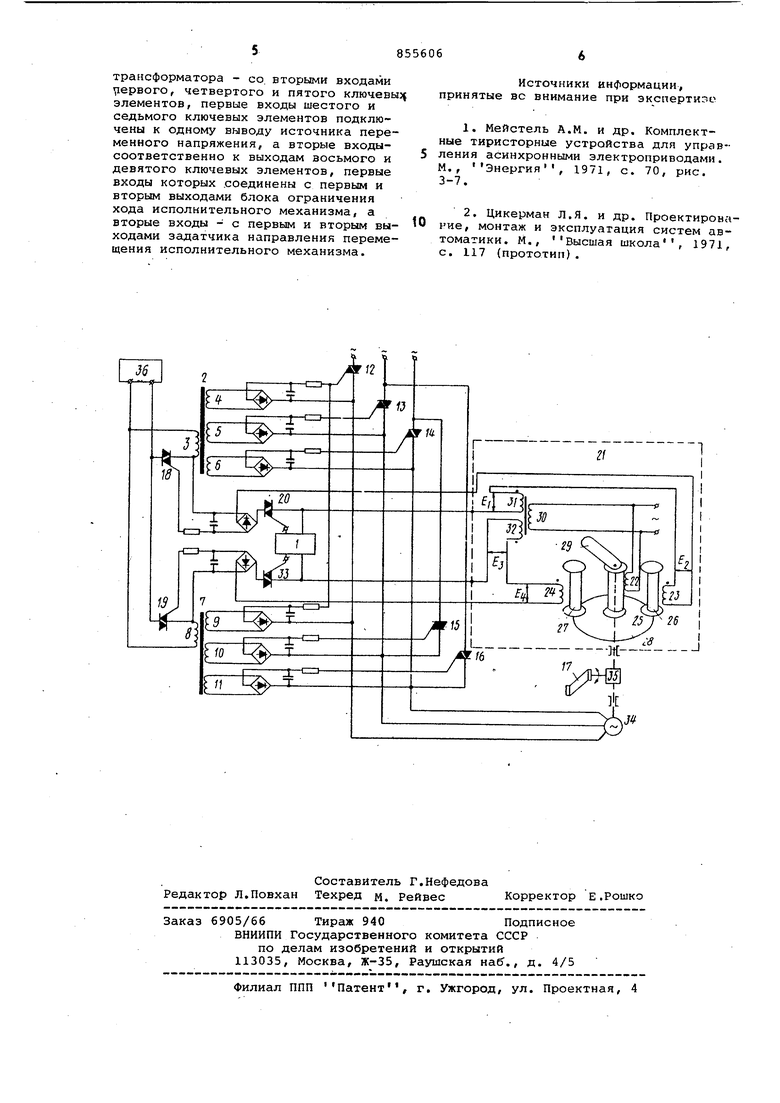
На iepтeжe приведена принципиальная электрическая схема устройства для управления исполнительным механиз- Ц1ОМ.5
Схема устройства содержит эадатчик направления перемещения исполнительного механизма 1, первый трансформатор 2 с первичной обмоткой 3 и JQ вторичными обмотками 4 - б г второй трансформатор 7 с первичной обмоткой 8 и вторичными обмотками 9 - 11, первый, второй, третий, четвертый и пятый ключевые элементы (симметричные тиристоррл) 12 - 16, исполнительный механизм (кривошип) 17, шестой, седьмой ивосьмой ключевые элементы (симметричные тиристоры) 18 - 20, блок 21 ограничения хода исполнительного механизма, состоящий из зрансформа- 20 торного преобразователя углового перемещения с первичной обмоткой 22 и вторичныг И обмотками 23 и 24, размещенными соответственно на сердечниках 25 - 27/ закрепленных на основа- 25 НИИ 28, причем сердечники 26 и 27 имеют возможность перемещения при регулировке, по краям основания 28 с торцовой стороны сердечника 25 на выходном валу редуктора закреплен под- JQ вижный сердечник 29 и из опорного трансформатора с первичной обмоткой 30 и вторичными обмотками 31 и 32, девятый ключевой элемент (симметричный тиристор) 33 асинхронный двига- jc тель 34, редуктор 35, источник переменного напряжения 36.
Устройство работает следующим образом.
Если магнитные цепи сердечника 25 с сердечниками 26 и 27 разомкнуты, то разности сигналов со г соричных обмоток 31 (32) трансформаторного преобразователя углового перемещения и со вторичных обмоток 23 (24) опорного трансформатора блока ограничения хо- 45 да кривошипа 21 () являются достаточно большими. В этом случае подача сигнала с первого или второго выхода задатчика 1 направления перемещения исполнительного механизма при-ijo водит к открыванию ключевые элементы 20 и 33. В результате этого-поступает управляющий сигнал на один из ключевых элементов 18 или 19 и это вызывает включение соответствующей первич- г ной обмотки 3 первого трансформатора 2 или первичной обмотки 8 второго трансформатора 7.
При этом сигналы со вторичных обмоток 4-6 или 9-11 этих трансформаторов поступают на управляющие цепи 60 ключевых элементов 12-14 или 12, 15 и 16 и обеспечивают коммутацию соответствующих цепей асинхронного двигателя 34, с помощью которого через редуктор 35 перемещается кривошип 17 в 65
соответствующем направлении. Одновременно с помощью редуктора 35 перемещается подвижный сердечник 29 трансформаторного преобразователя углового перемещения. Сердечники 26 и 27 выполиены с возможностью перемещения и закрепления их на основании 28 в таком положении, что при одном конечном положении кривошипа 17 подвижный сердечник 29 замыкает магнитную цепь между сердечником 25 и сердечником 26, а при другом положении - между сердечником 25 и сердечником 27. Замыкание магнитной цепи сердечника 25 с одним из сердечников 26 или 27 приводит к тому, что разность сигналов или резко уменьшается до величины, при которой происходит закрытие ключевых элементов 18 или 19. В результате этого первичные обмотки 3 или 8 первого трансформатора 2 или второго 7 отключаются и асинхронный двигатель останавливается. Изобретение с помощью простых средств обеспечивает полностью бесконтактное выполнение устройства для управления исполнительным механизмом. Это позволяет повысить его надежность и надежность современных средств автоматизации технологических процессов в различных отраслях промьшшенности.
Формула изобретения
Устройство для управления исполнительным механизмом, содержащее источник переменного напряжения, задатчик направления перемещения исполнительного механизма, асинхронный двигатель, первый, второй и третий выводы обмотки управления которого соединены соответственно с выходами первого, второго и третьего ключевых элементов, а вал кинематически через редуктор с исполнительным механимом и блоком ограничения хода исполн тельного механизма, четвертый и пятый ключевые элементы, выходы которых соединены соответственно с выходами второго и третьего ключевых элементов, а первые входы первого, второго и пятого, третьего и четвертого ключевых элементов соединены соответственно с первым/ вторым и третьим выводами трехфазного источника питания, отличающееся тем, что, с целью повышения надежности устройства, оно содержит шестой, седмой, восьмой и девятый ключевые элементы/ первый и второй трансформаторы, первичные.обмотки которых соединены с источником переменного напряжения и соответственно с выходами шестого и седьмого ключевых элементов, вторичные обмотки первого трансформатора - со вторыми входами первого/ второго и третьего ключевых элементов, а вторичные обмотки второго
трансформатора - со. вторыми входами iepBoro, четвертого и пятого ключевы элементов, первые входы шестого и седьмого ключевых элементов подключены к одному выводу источника переменного напряжения, а вторые входысоответственно к выходам восьмого и девятого ключевых элементов, первые входы которых .соединены с первым и вторым выходами блока ограничения хода исполнительного механизма, а вторые входы - с первым и вторым выходами задатчика направления перемещения исполнительного механизма.
Источники информации, принятые во внимание при экспертизе1.Мейстель A.M. и др. Комплектные тиристорние устройства для управления асинхронными электроприводами. М., Энергия, 1971, с. 70, рис. 3-7.
