(54) УСТРОЙСТВО ДЛЯ ПОЗИЦИОННОГО УПРАВЛЕНИЯ ПРИВОДОМ
| название | год | авторы | номер документа |
|---|---|---|---|
| Кольцевой счетчик | 1979 |
|
SU822380A1 |
| УСТРОЙСТВО ДЛЯ КОНТРОЛЯ ЗАПОЛНЕНИЯ ПУТИ | 1991 |
|
RU2025357C1 |
| УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ПРЕССАМИ | 1969 |
|
SU254616A1 |
| Устройство для позиционного управления объектом | 1978 |
|
SU753763A1 |
| Счетчик импульсов | 1990 |
|
SU1758874A1 |
| Система управления целевым вызовом для подъемного устройства с по меньшей мере одним подъемником с одной или несколькими кабинами | 1988 |
|
SU1838224A3 |
| Устройство для позиционного управления приводом перемещения объекта | 1975 |
|
SU570882A1 |
| Десятичный счетчик | 1981 |
|
SU995333A1 |
| Устройство для управления перемещением механизма по замкнутой трассе | 1988 |
|
SU1594486A1 |
| СИСТЕМА АВТОМАТИЧЕСКОГО ПЕРЕКЛЮЧЕНИЯ ПЕРЕДАЧ СТУПЕНЧАТОЙ ТРАНСМИССИИ ТРАНСПОРТНОГО СРЕДСТВА | 2003 |
|
RU2259505C1 |
1
Изобретение относится к электротехнике и может быть использовано для позиционного управления приводом поворотного устройства, например механизмов для смены светофильтров, диапозитивов, а также других многопозиционных устройств, как например головок в револьверных стенках.
Известны устройства для позиционного управления приводом, построенные в основном на релейно-контактных элементах Ц и 2.
Недостатком данных устройств является ниокая надежность ввиду большого количества контактных элементов. Кроме того, в устройстве (1 отсутствует возможность перехода из одного крайнего Положения в другое по кратчайшему пути, что ухудшает динамические характеристики привода.
Наиболее близким к изобретению техническим решением является устройство для позиционного управления приводом, содержащее элементы задания места остановки, датчики фактического положения привода и исполнительный орган с двумя блокировочными элементами (3.
Недостатком данного устройства является то, что оно имеет низкую надежность, обусловленную наличием элементов задания места останова с двумя одновременно включаемыми контактными узлами.
Цель изобретения - повышение надежности и автоматического выбора направления врашения по кратчайшему пути и места остановки привода.
Поставленная цель достигается тем, что в устройство введена матрица, состоящая из п входных шин, по крайней мере 2п выходных шин, не более п(п + 1) логических элементов И, не более 2п логических элементов ИЛИ и резисторов по числу выходных шин, причем каждая входная шина подключена к соответствующему датчику фактического попоженмя привода, каждый выход элементов задания места остановки соединен с двумя резисторами, второй вывод первого резистора подключен к нечетной выходной шнне, второй вывод второго резистора - к четной выходной шине соответствующей пары выходных шин, нечетные выходные шины через логические элементы ИЛИ
подключены через один из блокировочных злементов с первым входом исполнительного органа, а четные выходные шины аналогично подключены ко второму входу исполните;п ного органа, выходЬ датчиков фактического положедая привода подключены к одному из выводов источника питания, другой вывод которого подключен ко входам злементов задания места остановки, каждая шина одной пары выходных шин через логический злемент И подключена к соответствующей входной шине, при зтом каждая входная шина с номером i связана через логический элемент И с четной выходной шиНой. из пары с номером k при условии
К- - J -H/Jtc К 1, f nf7U К V,
И С нечетными выходными шинами в остальных случаях при k i, причем при /k - i/ | выходная шина с номером i соединена через логический злемент И с любой одной ишной
пары с номером k.
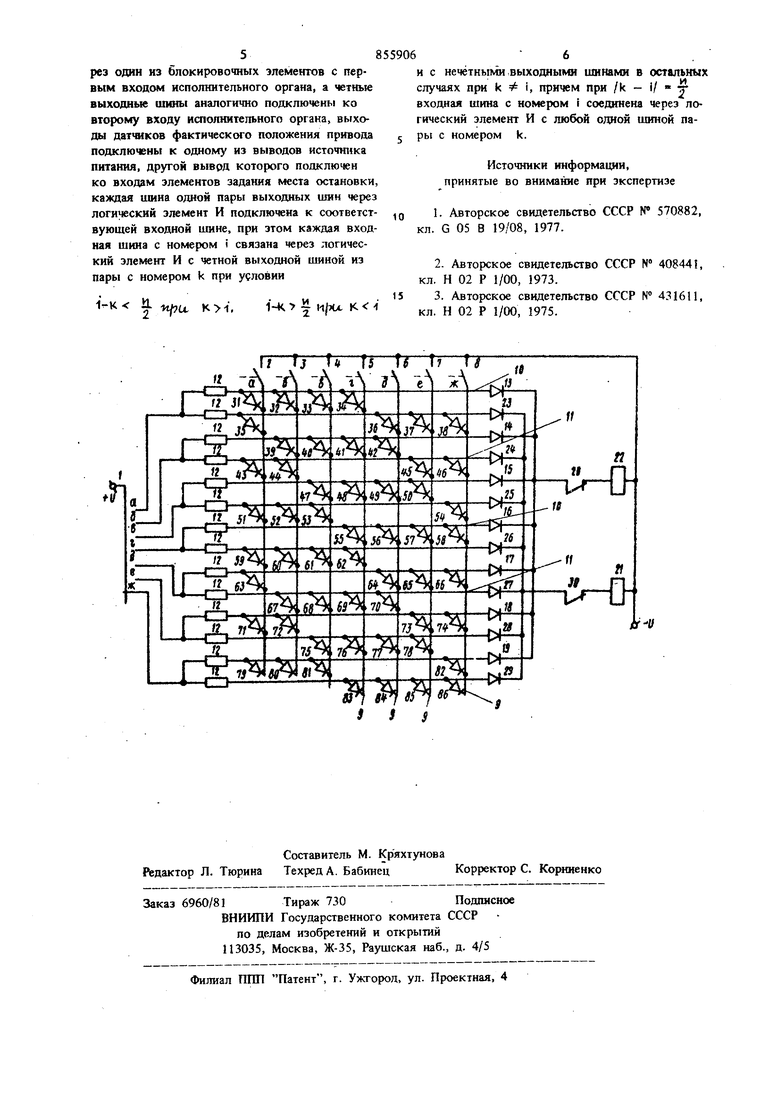
На чертеже представлена схема с вариантом исполнения устройства.
Устройство для позиционного управления приводом содержит элемент 1 задания места остановки, датчики 2-8 фактического положе1ШЯ привода, входные шины 9, нечетные выходные шины 10 и четные выходные шины 11 попарно подсоединены через резисторы 12 ко всем выходам элемента 1 задания места остановки. Все нечетные выходные шины 10 через элементы ИЛИ 13-19 и контакты 20 реле 21 подключены к обмоткам реле 22. Реле определяет положительное направление врашения привода. Все четные выходные шины 11 через элементы 23-29 ИЛИ подключены через контакт 30 реле 22 к обмотке реле 21, определяющему отрицательное направление вращения привода. В матрицу входят также логические элементы И 31-86i которые решают задачу выбора оптимального направления вращения привода и его остановки при занятии заданного положения а...ж.
Устройство работает следующимобразом. Для обеспечения наименьшего времени переключения из первого положения в пятое необходимо вращение привода через ж и е положения, что соответствует отрицательному направлению вращения привода. В исходном положении контакты датчика 2 фактического положения замкнуты. При установке элемента 1 задания места остановки в положение g напряжение питания через соответствующий резистор 12 и нормально за.мкцут:ът контакт 30 подается на обмотку реле 21. При этом диод 63 через замкнутый контакт датчика 2 фактического положения плунтирует обмотку реле 22.
Реле 21 включает вращение привода в отрицательном направлении. Контакт 20 этого реле размыкает цепь питания обмотки реле 22 н таким образом блокирует подачу питания на эту обмотку при размыкании контактов датчика 2 фактического положения, которое происходит при вращении привода. При занятии приводом пятого /g/ положения замыкаются контакты датчика 6 фактического положения. При этом
диод 70 через контакты датчика 6 фактического положения Шунтирует обмотку реле 21, вследствие чего движение привода прекращается. В случае, если перемещение привода в g положение осуществляется в положительном
направлении, то отключение привода происходит за счет шунтирования обмотки реле 22 диодом 64 через замкнутые контакты датчика 6 фактического положения. Аналогично схема работает при любом другом варианте пе еключения. Соответствующим включением логических элементов И (диодов) в матрице можно осуществлять любой алгоритм ттереключения привода. Количество элементов И может быть меньше, если переключение привода в какоелибо положение осуществляется в одну сторону, так как в зтом случае используется только одаа выходная шина.
Предполагаемое устройство позиционного управления приводом на п положений позволяет
повысить надежность, сократить время переключения привода за счет введения кругового реверсивного движения.
Формула изобретения
Устройство для позиционного управления приводом на п положений, содержащее элементы задания места остановки, датчики фактического положения привода и исполнительный орган с двумя блокировочными элементами, о тличающееся тем, что, с целью повышенля надежности и автоматического выбора направления вращения по кратчайщему путн и места остановки привода в устройство Ьведена матрица, состоящая из п входных ишн, по крайней мере 2п выходных шин, не более п(п + 1) логических злементов И, не, более 2п логических злементов ИЛИ и резисторов по числу выходных шин, причем каждая входная шина подключена к соответствующему датчику фактического положения привода, каждый выход элементов задания места остановки соединен с двумя резисторами, второй вывод первого резистора подключен к нечетной выходной щине, второй вывод второго резистора к четной выходной шине соответствующей пары выходных щин, нечетные выходные шины через логические элементы ИЛИ соединены через один из блокировочных элементов с первым входом исполнительного органа, а четные выходные шины аналогично подключены ко второму входу исполнитепьиого органа, выходы датчиков фактического положения привода подключены к одному из выводов источтжа питания, другой вывод которого подключен ко входам элементов задания места остановки, каждая ишиа одной пары выходных шин через логический злемеит И подключена к соответствующей входной ишне, при зтом каждая входная шина с номером i связана через логический злемент И с четной выходной шиной из пары с номером k при условии
t/7a ,
1-К и/Хл, К I
и с нечетными выходными ишнами в остальных случаях при k i, причем при /k - 1/ « 4 входная шина с иомером i соединена через логический злемент И с любой одной шиной пары с номером k.
Источники информации, принятые во внимание при экспертизе
15 3. Авторское свидетельство СССР № 431611, кл. Н 02 Р 1/00, 1975.
