Изобретение относится к средствам автоматики для поиска нужной позиции и направления движения к ней в замкнутых контурах технологических уст- . ройств .и может быть использовано в системах управления перемещением стеллажей элеваторного типа, манипуляторами, поворачивающимися барабанами и другими механизмами по замкнутой трассе.
Целью изобретения является упрощение устройства и повышение надежности его работы.
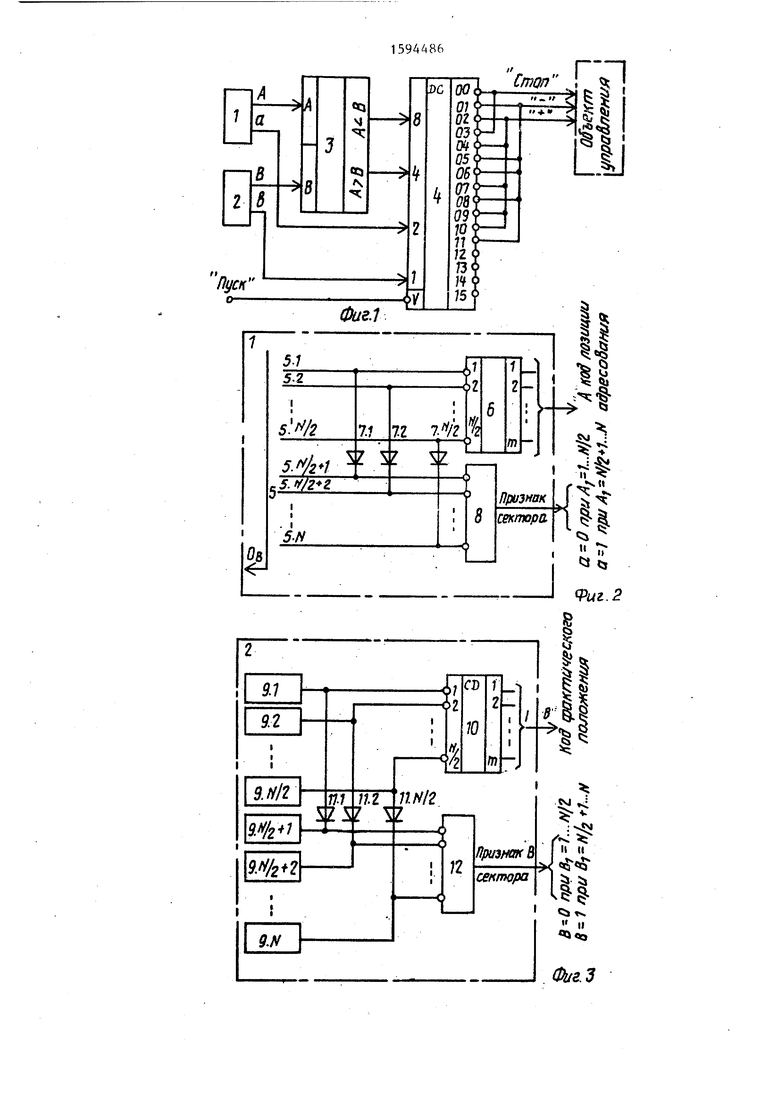
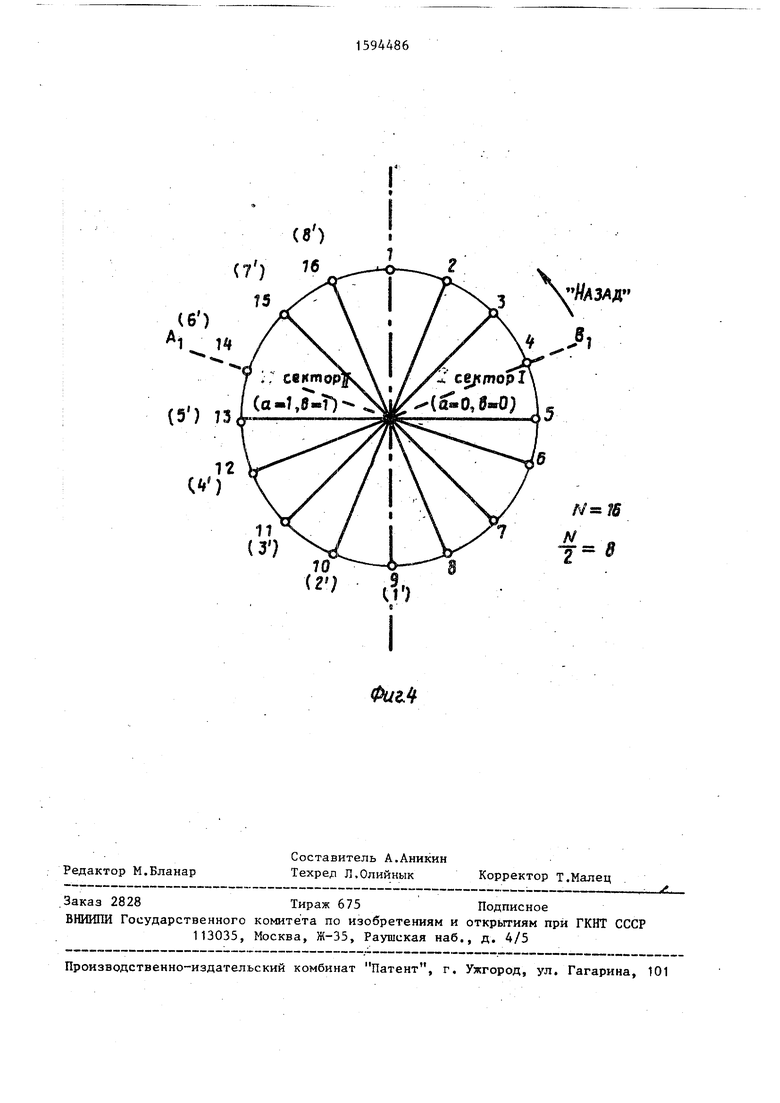
На фиг. 1 изображена функциональная схема устройства; на фиг. 2 - функциональная схема блока задания адреса; на фиг. 3 - функциональная схема блока датчиков положения; на фиг. 4 - схема, расположения позиций в замкнутом контуре технологического устройства.
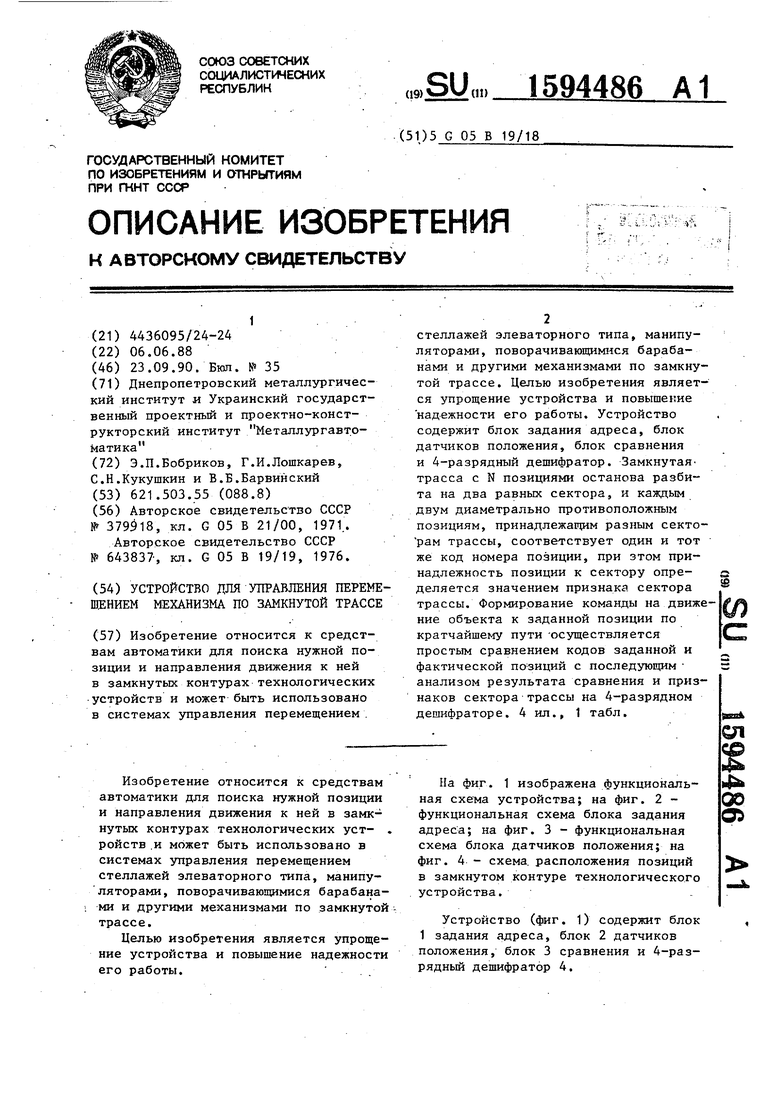
Устройство (фиг. 1) содержит блок 1 задания адреса, блок 2 датчиков положения, блок 3 сравнения и 4-разрядный дешифратор 4.
00 О)
Выходы дешифратора 4 допускают объединение между собой с целью образования монт-ажного ИЛИ, при этом выходную шину Стоп устройства образуют первый (00) и четвертый (03) выходы дешифратора, выходную шину Вперед - третий (02), пятый (04), восьмой (07), десятьп (09) и одиннадцатый (10) выходы дешифратора, а выходную шину Назад - второй (01), шестой (05), седьмой (06), девятый (08) и двенадцатый (11) выходы дешифратора.
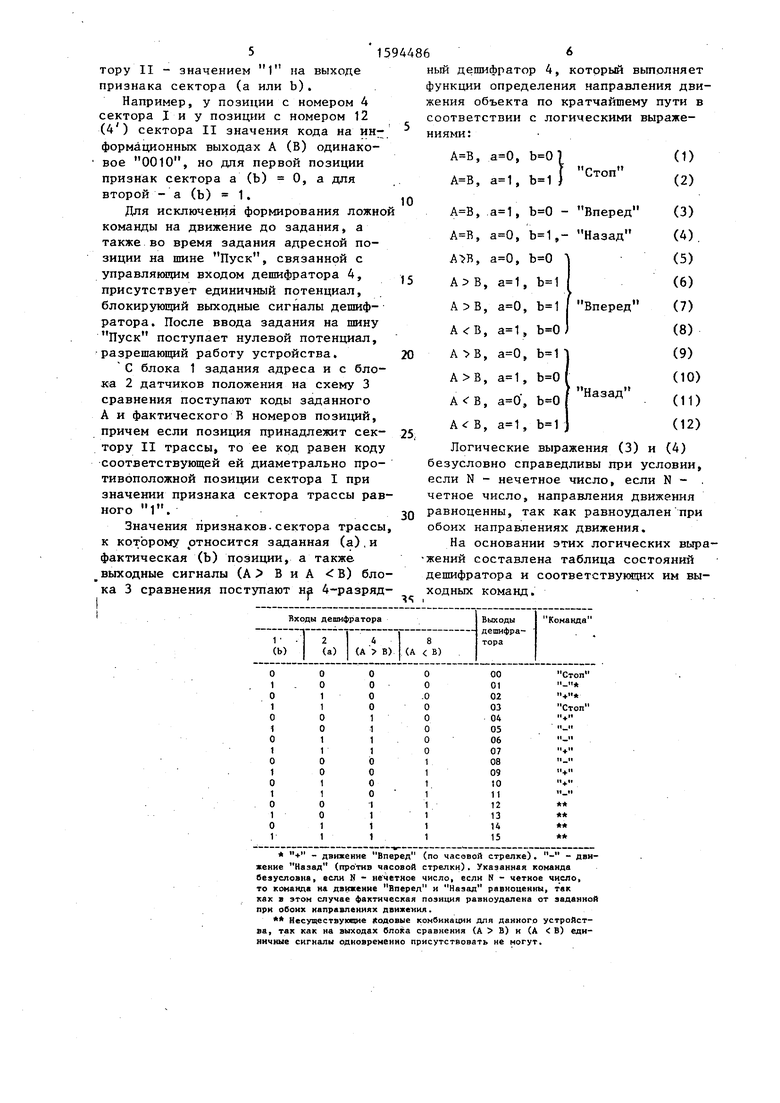
Блок 1 задания адреса (фиг. 2) содержит N-позиционный переключатель 5 адресных позидай замкнутой трассы, контакты которого 5.1-5.N/2, соответ- ствуюш ие адресным позициям первой половины трассы (I сектора), соединены с входами ишфратора 6 и через развязывающее диоды 7.1-7.N/2 с соответствующими контактами 5.N/2+1 - 5.N задания адресных позиций второй половины трассы (сектора 11), связанными с входами элемента ИЛИ 8. Выходы шифратора 6 образуют информационные выходы А кода позиции адресования , а выход элемента ИЛИ 8 - выход признака сектора трассы а, к которому принадлежит позиция адресования„
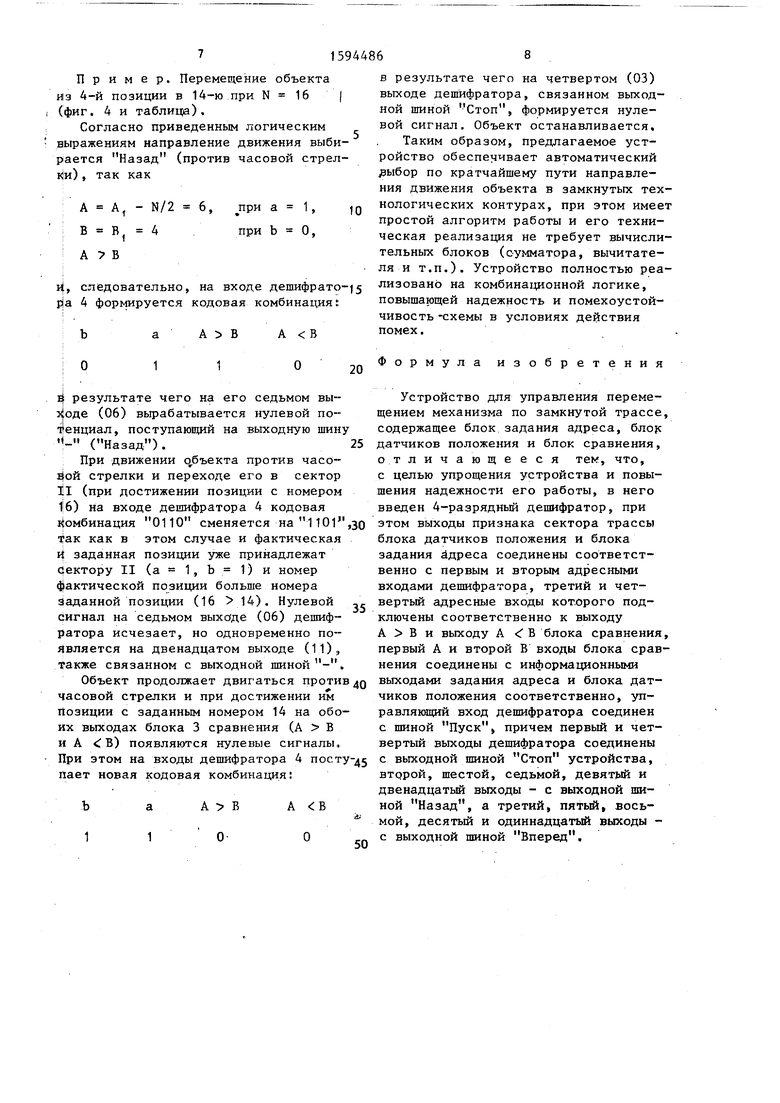
Блок 2 датчиков положения (фиг, 3) выполнен аналогично блоку 1 задания адреса и содержит N датчиков 9.1 - 9.N положения (по числу позиций останова), шифратор 10, 1)азвязывающие диоды 11.1-11.N/2 и элемент ИЛИ 12. Выходы датчиков 9.1-9,N/2, соответствующие позициям останова сектора I трассы, соединены с входами шифратора 10 и через развязывающие диоды 1l.1-11,N/2 с входами соответствую- пщх датчиков 9.N/2+1-9.N позиций останова сектора II трассы, связанными с входами элемента ИЛ1-1 12 , Выходы шифратора 10 образуют информационные выходы В кода фактического положения объекта, а выход элемента ИЛИ 12 - выход признака сектора трассы Ь, в котором находится объект.
Для нормальной работы устройства смена сигналов на выходах датчиков положения должна происходить при воздействии объекта на очередной по ход движения датчик.
Сигналы на выходных шинах блока 1
задан1 я адреса и блока 2 датчиков пожения формируются в соответствии с вражениями:
если А ё N/2, то А
а 0;
если А N/2, то , если В , N/2, то В В,, b 0; если В, N/2, то , ,
0
5
0
5
0
где А
N
N/2 номер позиции адресования объекта, заданный на пере- Ю1ючателе 5 блока 1; код номера позиции адресования (на информационных выходах блока 1); признак сектора трассы, к которому принадлежит позиция ад р е с ов а ния; номер позиции, в которой находится объект; код номера позиции фактического положения объекта (на информационных выходах блока 2);
признак сектора трассы, к которому принадлежит позиция фактического положения объекта;
количество позиций адресования (останова); округленная до полного числа величина, равная половине количества позиций
(N/2 -, если N - четное
N
- 1
число и N/2
N - нечетное число).
если
.
Следовательно, код номера позиции (заданной или фактической), которая принадлежит сектору I трассы (позиции с номерами 1 - N/2), соответствует номеру этой позиции, при этом на соответствующем выходе признака сектора (а или Ь), к которому принадлежит эта позиция, присутствует О, а код номера позиции, принадлежащей сектору II трассы (позиции с номерами N/2+1 - N), равен коду разности номера этой позиции и числа N/2, при значении сектора равном 1.
Таким образом, каждым двум диаметрально противоположным позициям (заданным или фактическим) на замкнутой трассе (фиг. 4) соответствует один и тот же код на информационных выходах (А или В), при этом принадлежность позиции к сектору 1 трассы определяется значением О, а к сек10
ору II - значением 1 на выходе ризнака сектора (а или Ь).
Например, у позиции с номером 4 ектора J и у позиции с номером 12 (4 ) сектора II значения кода на ий- формационных выходах А (В) одинаковое 0010, но для первой позиции признак сектора а (Ь) О, а для второй - а (Ь) 1.
Для исключения формирования ложной команды на движение до задания, а также во время задания адресной позиции на шине Пуск, связанной с управлякмдим входом дешифратора 4, присутствует единичный потенциал, блокирующий выходные сигналы дешифратора. После ввода задания на шину Пуск поступает нулевой потенциал, разрешающий работу устройства,
С блока 1 задания адреса и с блока 2 датчиков положения на схему 3 сравнения поступают коды заданного А и фактического В номеров позиций, причем если позиция принадлежит сектору II трассы, то ее код равен коду соответствующей ей диаметрально противоположной позиции сектора I при значении признака сектора трассы равного 1.
Значения признаков.сектора трассы, к которому относится заданная (а),и фактическая (Ь) позиции, а также выходные сигналы (А В и А В) блока 3 сравнения поступают на 4-разряд-
15
20
25
30
ный дешифратор 4, который вьтолняет функции определения направления движения объекта по кратчайшему пути в соответствии с логическими выражениями:
0
s
А А
В, , }
1 -В, , )
Стоп
5
0
Назад
5
0
, , - Вперед
, , ,- Назад
A JB, ,
А: В, ,
А В, , f Вперед
А гВ, ,
А В, ,
, ,
А г В, ,
В, ,
Логические выражения (3) и (4) безусловно справедливы при условии, если N - нечетное число, если N - . четное число, направления движения равноценны, так как равноудален при обоих направлениях движения.
На основании этих логических выра- жений составлена таблица состояний дешифратора и соответствукнцих им выходных команд.
(1) (2)
(3)
(А),
(5)
(6)
(7)
(8)
(9)
(10)
(11)
(12)

| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для автоматического адресования движущихся объектов | 1989 |
|
SU1612316A1 |
| Устройство для адресования подвижных объектов | 1976 |
|
SU695915A1 |
| Устройство для адресования электрического транспорта | 1980 |
|
SU893746A1 |
| Устройство для автоматического выбора направления движения объекта | 1985 |
|
SU1289764A1 |
| Устройство для адресования транспортного средства | 1987 |
|
SU1618706A1 |
| Устройство для управления автоматическими транспортными средствами | 1983 |
|
SU1101841A1 |
| Устройство управления приводом перемещения транспортного механизма | 1988 |
|
SU1661080A1 |
| Устройство для автоматического выбора направления движения объекта | 1987 |
|
SU1555246A2 |
| Устройство для автоматического выбора направления движения объекта | 1983 |
|
SU1154179A1 |
| Система автоматического адресования в процессе сортировки | 1988 |
|
SU1533772A1 |
Изобретение относится к средствам автоматики для поиска нужной позиции и направления движения к ней в замкнутых контурах технологических устройств и может быть использовано в системах управления перемещением стеллажей элеваторного типа, манипуляторами, поворачивающимися барабанами и другими механизмами по замкнутой трассе. Целью изобретения является упрощение устройства и повышение надежности его работы. Устройство содержит блок задания адреса, блок датчиков положения, блок сравнения и 4-разрядный дешифратор. Замкнутая трасса с N позициями останова разбита на два равных сектора, и каждым двум диаметрально противоположным позициям, принадлежащим разным секторам трассы, соответствует один и тот же код номера позиции, при этом принадлежность позиции к сектору определяется значением признака сектора трассы. Формирование команды на движение объекта к заданной позиции по кратчайшему пути осуществляется простым сравнением кодов заданной и фактической позиций с последующим анализом результата сравнения и признаков сектора трассы на 4-разрядном дешифраторе. 4 ил.
+ - движение Вперед (по часовой стрелке). - - движение Назад (про тив часовой стрелки), Указанная команда безусловна, если И - нечетное число, если N - четное число, то команда на движение Вперед и Назад равноценны, так как в этом случае фактическая позиция равноудалена от заданной при обоих налравлеииях движения.
Несуществующие |(одовые комбинации для данного устройства, так как на выходах Спока сравнения (А В) и (А В) единичные сигналы одновременно присутствовать не могут.
Пример. Перемещение объекта из 4-й позиции в 14-ю при N 16 | (фиг. 4 и таблица).
Согласно приведенным логическим выражениям направление движения выбирается Назад (против часовой стрел- ) , так как
А, - N/2 6, В, 4
при а при b
А В
И
FJa
следовательно, на входе дешифрато- 5 4 формируется кодовая комбинация i:
А : В
А В
15944868
в результате чего на четвертом (03) выходе дешифратора, связанном выходной шиной Стоп, формируется нулевой сигнал. Объект останавливается. Таким образом, предлагаемое устройство обеспечивает автоматический ;зыбор по кратчайшему пути направления движения объекта в замкнутых технологических контурах, при этом имеет простой алгоритм работы и его техническая реализация не требует вычислительных блоков (сумматора, вычитате- ля и т.п.). Устройство полностью реализовано на комбина1Д1онной логике, повышающей надежность и помехоустойчивость -схемы в условиях действия помех.
10
1
1
О
20
Ц результате чего на его седьмом вы- (06) вырабатывается нулевой по- т|енциал, поступающий на выходную шину (Назад).
При движении о бъекта против часовой стрелки и переходе его в сектор il (при достижении позиции с номером 16) на входе дешифратора 4 кодовая 1 омбинация 0110 сменяется на 1101 так как в зтом случае и фактическая И заданная позиции уже принадлежат Сектору II (а 1, b 1) и номер фактической позиции больше номера Заданной позиции (16 14). Нулевой сигнал на седьмом выхо(де (06) дешифратора исчезает, но одновременно появляется на двенадцатом выходе (11), также связанном с выходной шиной -.
Объект продолжает двигаться против часовой стрелки и при достижении им Позиции с заданным номером 14 на обоих выходах блока 3 сравнения (А В и А В) появляются нулевые сигналы. При этом на входы дешифратора 4 посту Пает новая кодовая комбинация:
а 1
А В О
А В О
0
5
о
д 5
5
50
Формула изобретения
Устройство для управления перемещением механизма по замкнутой трассе, содержащее блок задания адреса, блок датчиков положения и блок сравнения, отличающееся тек, что, с целью упрощения устройства и повышения надежности его работы, в него введен 4-разрядный дешифратор, при этом выходы признака сектора трассы блока датчиков положения и блока задания Адреса соединены соответственно с первым и вторым адресными входами дешифратора, третий и четвертый адресные входы которого подключены соответственно к выходу А В и выходу А В блока сравнения, первый А и второй В входы блока сравнения соединены с информационными выходами задания адреса и блока датчиков положения соответственно, уп- равлякащ1й вход дешифратора соединен с шиной Пуск причем первый и четвертый выходы дешифратора соединены с выходной шиной Стоп устройства, втррой, шестой, седьмой, девят} 1й и двенадцатый выходы - с выходной шиной Назад, а третий, пятый, восьмой, десятый и одиннадцатый выходы - с выходной шиной Вперед,
5-1 5.2
S.
0,
т
т
М
I1
. . 5
, tf
i I
pS; k R
lj
1 i t
7Z J.n
Л
8
признак
сектора
(Риг.2
8
т
М
ПН12
гп
сектора
Фиг.д
НАЗАД
Фиг.
| ВСЕОС'л ''ifil'-'e ••:-•-/." | 0 |
|
SU379918A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Устройство для выбора наименьшего угла поворота вращающегося узла станка | 1976 |
|
SU643837A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
