1
Изобретение относится .к устройствам управления позиционными приводами и к дискретным следящим системам и может быть использовано в различных областях автоматики.
Известно устройство I для автоматического выбора направления движения объекта, которое содержит переключатель, датчики местонахождения, схемы совпадения, собиратльные схемы.
Недостатком этого устройства является его сложность, так как блок слежения состоит из большого количества схем совпадения и схем разделения, реализованных на ползпроводниковых диодах, что снижает надежность работы устройства при большом количестве мест остановок.
Наиболее близким к изобретению по технической сущности является устройство 2 для позиционного управления приводом, которое состоит из элемента задания места, датчика фактического положения, диодного блока слежения и исполнительного органа.
В этом устройстве элемент задания места остановки вьгаолнен в виде позиционного распределителя, выходы позиций которого электрически соединены с выходами позиций датчика фактического положения привода со сдвигом на одну позицию для одного или другого направления, причем между выходами распределителя включены цепи выпрямителей с взаимно противопололсной полярностью для каждого из направлений движения, а блок слежения образован разделительными выпрямителями. Недостатком этого устройства является его сложность, заключающаяся в необходимости применения диодного блока . Кроме того, известное устройство не обладает достаточной яадежностью в работе при большом количестве мест остановки.
Целью изобретения является упрощение устройства. Поставленная цель достигается тем, что в устройстве выходы позиций элемента задания места остановки подсоединены через соответствующие им первые размыкающие контакты путевых -переключателей к общей точке соединения вторых размыкающих контактов, соединенных последовательно, причем цепочка вторых размыкающих контактов подключена к исполнительным реле.
Сущность изобретения поясняется чертежом.
Устройство для позиционного управления
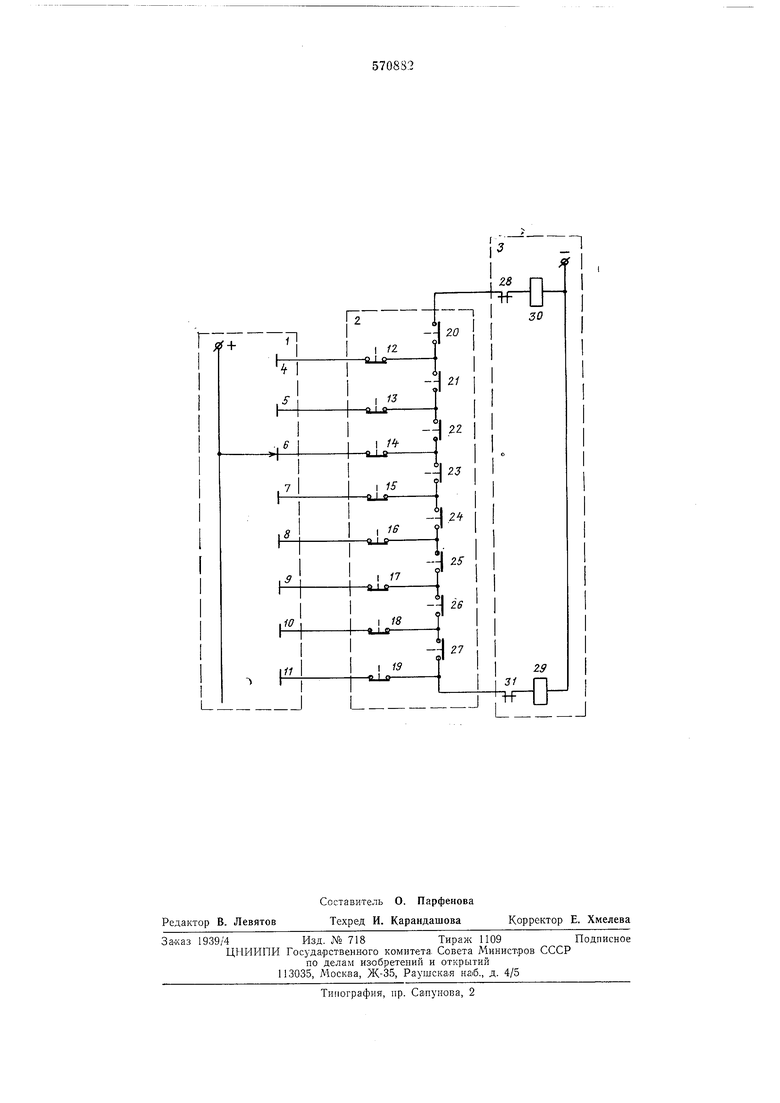
приводом перемещения объекта содержит элемент задания места остановки 1, датчик 2 фактического положения привода, выполненный на базе путевых многоконтакпчплх переключателей, и исполнительный орган 3, выполненный на базе исполнительных реле . 3. Элемент задания 1 выполнен в виде позиционного распределителя, выходы 4-11 которого соединены с соответствующим им первыми размыкающими контактами 12-19 путевых переключателей датчика 2 фактическо- 5 го положения. Выходы лервых размыкающих контактов 12-19 подключены к соответствующим общим точкам последовательно соединенных вторых размыкающих контактов 2027 путевых -переключателей датчика фактиче- 10 ского положения, причем выход контакта 12 подключен к общей точке контактов 20 и 21, выход контакта 13 к общей точке контактов 21 и 22 и т. д. Один выход цепочки из последовательно со- 15 единенных вторых размыкающих контактов 20-27 через размыкающий контакт 28 реле 29исполнительного органа 3 подключен к обмотке реле 30 («Назад), а другой выход цепочки через размыкающий контакт 31 реле 20 30-к обмотке реле 29 («Вперед). Устройство работает следующим образом. Привод находится на позиции, которой соответствуют контакты 14-22. При этом положении привода путевой пе- 25 реклЕОчатель возбужден, т. е. контакты 14 и 22 разомкнуты. Если положение элемента заДания 1 места остановки соответствует показанному на чертеже, ток не может пройти ни по одной из обмоток реле 29 и 30 исполни- 30 тельного органа 3. Привод находится на позиции, которой соответствуют контакты путевых переключателей 14-22. Элемент задания места остановки 1 перемещен в положение, соответствующее 35 выходу 9, в обмотку реле 29 «Вперед исполнительного органа пройдет ток через замкнутые контакты 17, 26, 27 путевых переключателей датчика фактического положения и размыкающий контакт 31 реле 30. Цепь пита- 40 ПИЯ реле 30 «Назад исполнительного органа 3 остается разорванной, так как контакт 22 и контакт 28 реле 29 разомкнуты. Реле 29 исполнительного органа переключает привод в сторону «Вперед. После освобождения кон- 45 тактов переключателя 14-22 цепь реле 30 остается разомкнутой контактом 28 ранее сработавщего реле 29. Когда привод перейдет в заданное положение, которому соответствзют контакты 17-25, 50 то цепи реле 29 и 30 исполнительного органа 3 разорвутся контактом 17 путевого переключателя, а контакт 25 дополнительно разорвет цепь питания реле 30 «Назад. Привод останавливается в заданном положении.55 Привод находится на позиции, которой соответствуют контакты 17-25. Элемент задания места остановки 1 перемещен в положение соответствующее выходу 5. В обмотку реле 30 «Назад исполнительного органа go пойдет ток через замкнутые контакты 13, 21, 20 путевых переключателей датчика фактического положения и размыкающий контакт 28 реле 29. Цепь питания реле 29 «Вперед исполнительного органа 3 остается разорванной, так как контакт 25 и контакт 31 -реле 30 замкнуты. Срабатывает реле 30 исполнительного органа и включает привод в сторону «Назад. После освобождения контактов переключателей 17-25 цепь реле 29 остается разомкнутой контактом 31 ранее сработавщего реле 30. Когда привод перейдет в заданное положение, которому соответствуют контакты путевых переключателей 13, 21, то цепи питания обмоток реле 30 и 29 исполнительного органа 3 разорвутся контактом 13 путевого переключателя, а контакт 21 дополнительно разорвет цепь питания обмотки реле 30 «Назад, привод остановится в заданном положении. На чертеже показано восьмипозиционное устройство управления приводов. Аналогичным образом оно может быть построено для любого другого количества нозиций. Предлагаемое устройство, в котором полностью исключен диодный логический блок, а функцию слежения в датчике фактического положения выполняет один орган (путевые переключатели), выгодно отличается от прототипа, как по простоте схемного решения, так и по надежности в работе, В результате полного отсутствия цепочек выпрямителей, вызывающих пони кение уровня рабочего сигнала, будет практически отсутствовать неравномерность напряжения на элементах исполнительного органа, что позволит значительно увеличивать количество мест остановки привода. Формула изобретения Устройство для позиционного управления приводом перемещения объекта, содержащее элемент задания места остановки, выполненный в виде позиционного распределителя, датчик фактического положения привода, выполненный на базе путевых многоконтактных переключателей и исполнительные реле, отличающееся тем, что, с целью упрощения его конструкции, выходы позиций элемента задания места остановки подсоединены через соответствующие им первые размыкающие контакты путевых переключателей к общей точке соединения вторых размыкающих контактов, соединенных последовательно, причем цепочка вторых размыкающих контактов подключена к исполнительным реле. Источники информации, принятые во внимание при экспертизе 1.Авторское свидетельство СССР №209067, кл. Q 06F 15/20, 1966. 2.Авторское свидетельство СССР №408441, кл. Н 01Н 36/00, 1960.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ ПОЗИЦИОННОГО УПРАВЛЕНИЯ | 1973 |
|
SU408441A1 |
| Устройство для позиционного управления приводом перемещения объекта | 1985 |
|
SU1287106A1 |
| Устройство для позиционного управления приводом подъемника | 1976 |
|
SU667479A1 |
| Устройство для позиционного управления объектом | 1978 |
|
SU753763A1 |
| Устройство для управления реверсивным электроприводом | 1981 |
|
SU993209A1 |
| Устройство для позиционного управления приводом | 1979 |
|
SU855906A1 |
| Устройство для позиционного управления приводом перемещения объекта | 1987 |
|
SU1500993A2 |
| Устройство для программного управ-лЕНия пЕРЕМЕщЕНиЕМ иСпОлНиТЕльНОгОэлЕМЕНТА | 1979 |
|
SU840806A1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ГРУЗОНОСИТЕЛЕМ | 1991 |
|
RU2006435C1 |
| Устройство для адресования транспортного средства | 1987 |
|
SU1618706A1 |