датчик тока якоря, узел сравнения зада ного и фактического значения тока и фильтр, включенный между узлом сравнения и входом операционного усилител а также мостовую схему с ист НИКОМ опорного напряжения, служащую для ограничения скорости нарастания то ка и включенную своими входами переменного тока между входом и выходом операционного усилителя 2. Это устройство имеет обший недоста ток всех контуров систем подчиненного регулирования (кроме самого верхнего иерархическому уровню), а именно введение ограничения регулируемой величи путем ограничения уровня сигнала на выходе регулятора наружного контура. Это введение ограяичёнкя по току путе ограничения сигнала на выходе регулят ра скорости вызьюает отклонение от оп тимального переходного процесса регул рования скорости при изменении услови коммутации. В известном устройстве параметры регулирования тока якоря выбраны, исходя из двух возможных вариантов настройки, - переходного (модульного) оптимума и симметричного, оптимума. При переходном оптимуме скорость нарастания тока невелика, что обусловливает неполное использование коммута ционных свойств электродвигателя по параметру SV . При настройке на сим метричный оптимум величина перерегулирования по току якоря электродвигателя велика (до 41%), Это ведет к недоиспользованию коммутационных свойств электродвигателя по величине тока якоря в последующий период, так как максимум тока не должен превы шать допустимого по коммутации значения. При этом в контур регулировани тока вносится дополнительное интегрирующее звено, так как передаточная функция регулятора тока Wp( где Т( П Тя , а величина И определяется характером требуемой оптимиза ции переходного процесса Однако при возможных в процессе. работы изменениях величины I я требуемая оптимизация нарушается. Кроме того, в известном устройстве не предусмотрены изменения ограничений величины тока якоря в соответствии с законами коммутации, а также возможность уменьшения величины тока якоря при перегреве его обмоток и повышения интенсивности работы и использования возможности электродвигателя при холодных обмотках. Целью изобретения является повьшдениё стабильности токовых диаграмм в динамических режимах при более полном использовании возможности электродвигателя. Поставленная цель достигается тем, что в известное устройство, содержащее электродвигатель лостоянного тока, регулируемый вентильный преобразователь, регулятор тока якоря и датчик тока якоря, введены эталонное апериодическое звено с обратными связями по коммутационным и динамическим параметрам и управляющий элемент, включенный между выходом и входом регулятора тока, причем вход эталонного апериодического звена подсоединен ко аходу регулятора тока якоря, а выход упомянутого звена подключен к регулирующему входу управляющего элемента, к которому через дополнительно введенный инвертирующий усилитель подключен датчик тока якоря. В цепь обратной связи эталонного апериодического звена включен входами переменного тока диодный мост, к выходам постоянного тока которого встречно подключен выход суммирующего усилителя, ко входам которого параллельно присоедийены дополнительный датчик модуля напряжения на якоре через дополнительный первый блок нелинейности - датчик тока возбуждения, а также соединенный последовательно со сгабилигроном допо; нительный датчик температуры якорных обмоток. Управлякиций элемент выполнен в виде блока умножения, один из входов которого является регулируклиим. Упра ляющий элемент выполнен в виде диодно мостовой схемы с транзистором, причем :К выходам постоянного тока диодно-мостовой схемы подключен пер&ход эмиттерколлектор транзистора, переход эмитте| база которого служит регулирующим входом управляющего элеменга. Для изменения постоянной времени эталонного апериодического звена между его входом и выходом включены входы переменного тока второго диодного моста, к выходам постоянного тока которого присоединен переход эмиттер-коллектор дополнительного транзистора, а к переходу эмитте{ база последнего подключен дополнитель- ный суммирующий элемент, ко входу которого параллельно подключены датчик
модуля напряжения на якоре и выход вто рого дополнительного блока нелинейности ко входу которого подключен выход датчика тока возбуждения. Ко входу дополнительного суммирующего элемента последовательно с пороговым элементом подключен датчик скорости нарастания ускорения.
Сравнение величины, пропорциональной току якоря с напряжением эталонного звена позволяет уменьшить влияние изменений параметров контура регулир1 вания якоря от нагрева и изменения маг нитного потока,
Обратные связи эталонного звена по току возбуждения и напряжению на якоре ограничивают предельную величину напряжения эталонного звена в функции этих величин. Величина напряжения эталонного звена, а следовательно, и величина тока якоря уменьшается теисже при перегревах обмотки 51коря вследствие действия датчика температуры обмоток,
Вьтолнение управляющего элемента в виде блока умножения, ко входу которого подключены встречно включенные выходы эталонного звена и инвертирующего усилителя и второй вход которого подключен к выходу регулятора тока якоря, а выход - ко входу последнего, лозволяет при напряжении на выходе эталонного звена, большем напряжения на выходе инвертирующего усилителя (г.е. при гоке якорной цепи, не достигшем тока задания) иметь положительную обратную связь между выходом и входом регулят1 ра тока якоря и получать благодаря максимальное напряжение на его выходе, так как коэффициент усиления его при этом возрастает, а при достижении током величины задания обратная связь становится отрицательной, напряжение регулятора тока якоря уменьшается, и величина тока ограничивается, В резуль- тате величина тока якоря строго следует заданию на выходе эталонного звена.
Когда в качестве управляющего элемента используется диодно-мостовая схема, количество элементов, участвующих в управлении, меньше, но коэффицвенг усиления регулятора тока меняется от нуля до некоторой конечной величины, меньшей, чем при использовании блока умножения.
Поскольку схема не имеет интегри- руклиих звоньев, ее быстродействие увеличивается. Шунтирование эталонного звена входами переменного тока диодного моста, к выходам постоянного тока которого подсоединен транзистор, используемый в качестве регулируемого сопротивления, для чего к его переходу база-эмиттер через cyм иpyющий эл&мент присоединены обратные связи по току возбуждения и напряжению на якоре, обеспечивает изменение постоянной времени эталонного звена в функции ооновных параметров, определяюших коммутацию, что, в свою очередь, позволяет регулировать скорость нарастания тока якоря электродвигателя.
Таким же образом ограничивается скорость нарастания ускорения. Включение на вход суммирующего элемеита датчика скорости нарастания ускорения (например, рабочего органа на тросовой поавеске - ковша экскаваторее-драглайка) дает возможность избежать чрезмерной скорости нарастания тока и больших динамических нагрузок на электродвигатель и механизм в тяжелых режимах и более полно использовать возможности электро двигателя в остальных режимах,
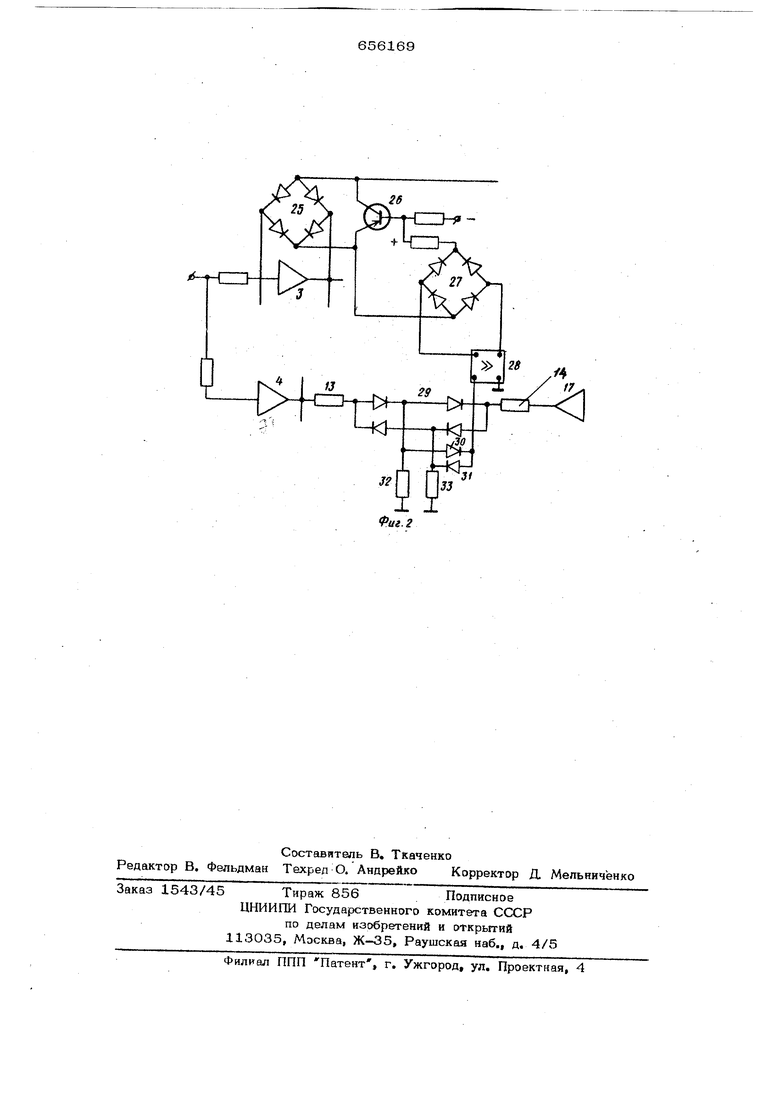
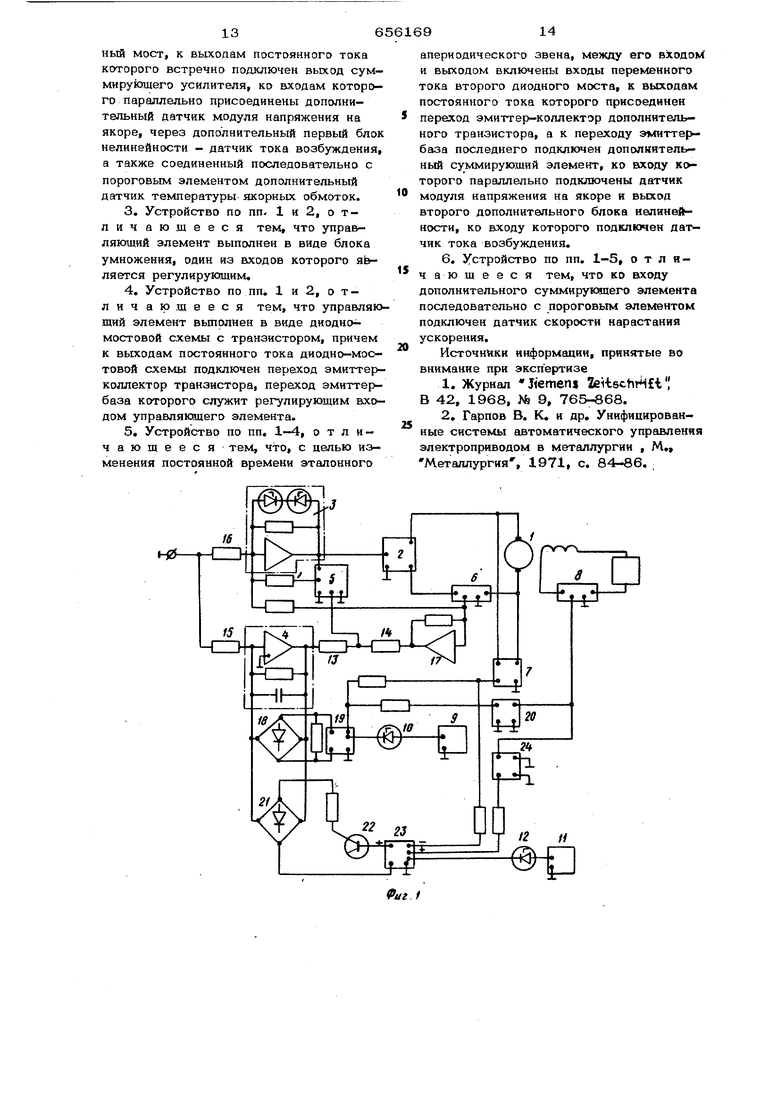
На фиг. 1 изображено устройство для регулирования тока якоря электродвигателя; на фиг, 2 - вариант вьтолнения управляющего элемента в виде диодно-
з мостовой схемьи
Устройство содврх ит якорь 1 электродвигателя, регулируемый преобразователь 2, регулятор 3 тока 51коря, эталонное апериодическое звено 4, управлякндий
У элемент 5, а также датчик 6 тока якоря, датчик 7 модуля напряжения на якоре, датчик 8 тока возбуждения, датчик 9 температуры якорных обмоток, вкл1Оченный последовательно с пороговым элементом, например со стабилитроном 10, датчик 11 скорости нарастания ускорения, включенный последовательно с пороговым элементом, например стабилитроном/ 12, Якорь 1 8лектродвиг 5теля присоединен с регулируемому преобразователю 2 последовательно с датчиком 6 тока якоря.
Ко входу преобразователя 2 присоединен выход регулятора 3 тока якоря я
0 один из входов (управляющий) управляющего элемента 5, к другому кз входов (регулирувдщему) его присоединена обшая точка резисторов 13 и 14, Второй конец резистора 13 соединен с выходом эта5лонного апериодического звена 4, вход которого через резистор 15 включен на вход регулятора тока якоря. На входе регулятора 3 тока вклкиен резистор 16..
Датчик 6 тока якоря через инвертяру1ощий усилитель 17 подключен к резистору 14, Между выходом и входом эталонного звена 4 включены входы переменного тока диодного моста 18, к выходам постояного тока которого подсоединен встречно выход суммирующего усилителя 19. Ко входам усилителя 19 подсоединены параллельно датчик 7 модуля напряжения на якоре 1, через первый блок 20 нелинейнскгги датчик 8 тока возбуждения, через стабилитрон 1О датчик 9 температуры Якорных обмоток.
Для изменения постоянной времени эталонного звена 4 между его входом и выходом включены входы переменного тока второго диодного моста 21, К выходам постоянного тока последнего присоединен переход эмитте5 -коллектор транзистора 22, К переходу эмиттербаза транзи.стора 22 подключен дополнительный суммирукаций элемент 23, например магнитный усилитель с высокой частотой питания, ко входам которого параллельно подключены датчик 7 модуля напряжения на якоре 1, через второй блок нелинейности 24 подключен датчик 8 тока возбуждения, а также череда пороговый элемент, возможным вариантом которого может быть, например стабилитрон 12, датчик 11 скорости нарастания ускорения рабочего органа на гросбч вой подвеске, например ковша экскаватора-драглайна.
На фиг, 2, где представлен вариант выполнения управляющего элемента 5, изображена диодно-мостовая схема 25, подключенная входами переменного тока между выходом и входом регуляторй 3 тока якоря. К выходам постоянного тока диодно-мостовой схемы 25 подключен переход эмиттер-коллектор транзистора 26, а его переход эмиттер-база служит регулирукииим входом управляющего элемента 5. К переходу эмиттер-база, транзистора 26 через диодный мост 27 подсоединен выход потенциального разделителя 28, Входы переменного тока диодного моста 29 подсоединены между резисторами 13 и 14, а его выходы постоянного тока через-диоды ЗО и 31 ко входу потенциального разделителя 28 Один из выходов переменного тока диодной мостовой схемы 29 соединен с резистором 32 и анодом диода ЗО, а другой соединен с резистором 33 и катодом диода 31, Вторые (КОНЦЫ резисторов 32
и 33 соединены между собой и обшей точкой схемы.
Устройство работает следующим образом,
При отсутствии сигнала на его входе
напряжение на выходе регулятора 3 тока якоря и напряжение на выходе эталонного звена 4 равно нулю, а выход моста 18 заперт благодаря наличию опорного напряжения на выходе суммирукядего усилителя 19, Ток якоря равен нулю, поэтому напряжение на выходе инвертирующего усилителя 17 также равно нулю; При этом напряжение на регулирующем входе управляющего элемента 5 также равно нулю, что независимо от исполнения этого элемента, определяет коэ фициент усиления регулятора тока 3,
При поступлении на вход устройства сигнала задания, например положительного, отрицательное напряжение на выходе эталонного звена 4 начинает расти со скоростью, определяемой постоянной времени этого звена.
Одновременно появляется отрицательное напряжение на выходе регулятора 3 тока якоря и напряжение на выходе регулируемого преобразователя 2, Под действием напряжения на выходе преобразователя 2 по обмотке якоря 1 электродвигателя потечет ток, вследствие чего появляется отрицательное напряжение на вьЬсоде датчика.6 тока якоря и положительное напряжение на выходе инвертирующего усилителя 17, Если ток якоря при этом по модулю меньше задаваемого напряжения на выходе эталонного звэна 4, то управляющий элемент 5 ув&личивает коэффициент передачи регулятора тока 3, что приводит к увеличению напряжения вентильного преобразователя 2 и тока якоря 1 до достижения задан ной величины. При этом существуют раэ, личия в режимах работы схемы, когда используется в качестве управляющего элемента 5 блок умножения или схема фиг, 2, При использовании варианта схемы с блоком умножения в качестве
управлякидего элемента при напряжении на выходе эталонного Звена по модулю больше, чем напряжение на выходе инвертирующего усилителя 17, положительном сигнале задания на управляющем
входе блока умножения начинают действовать отрицательные напряжения, что приводит к преобразованию знака сигнала и знака обратной связи, осуществляемой через блок умножения, В этом случае.
который соответствует отставанию в&личины тока якорной цепи от задания, регулятор 3 тока под действием образовавшейся положительной обратной связи выходит на уровень ограничения напряжения усилителя, т.е. ведет себя как релейный элемент.
При использовании в качестве управляющего элемента 5 схемы фиг. 2 и тех же соотношениях модулей и знаков напряжений потенциал на общей точке катода диода 30 и резистора 32 становится по отношению к общей точке схемы отрицательным, что приводит к подаче на базу транзистора 26 через потенциальный разделитель 28 и диодный мост 27 положительного потенциала и увеличению эквивалентного сопротивления транзистора 26, уменьшению обратной связи между аходом и выходом регу лятора 3 и увеличеншо напряжения на ег выходе. При этом регул$ггор 3 может оставаться на линейной части характеристики или перейти на режим насьпце- ния, т.е. вести себя как релейный элемент в зависимости от выбранного соотношения параметров.
Под действием увеличенного напряжения на аходе преобразователя 2 увеличивается ток якоря 1, напряжение на выходе датчика тока якоря 6 и инвертирующего усилителя 17.
После достижения током якоря заданной величины меняется направление тока в резисторах 13 и 14 и потенциал их общей точки.
В этом случае на управляющий вход блока умножения, используемого в качестве управляющего элемента 5, поступает положительный сигнал, а на второй вход - отрицательный. Поэтому межйу выходом и входом регулятора 3 образуется отрицательная обратная связь, величина которой будет тем больше, чем больше превышение тока якоря над заданным уровнем. Таким образом, компенсируется любое отклонение параметров контура регулирования тока якоря, т.е. осуществляется его адаптивное регулирование. В этом же случае, если в качестве элемента 5 используется схема фиг. 2, на общей точке резистора 33 в катода диода 31 возникает положительный потенциал, поэтому на вход потенциального разделителя 28 напряжение не попадает и транзистор 26 под действием отрицательного смещения на базе уменьшает свое эквивалентное
сопротивление, увеличивается отрицательная обратная связь между выходом и входом регулятора 3 и ограничивается величина тока якоря. Таким образом, и в этом случае обеспечивается адаптивное регулирование тока якоря. Если при применении в качестве элемента .5 блока умножения поддерживается значение тока якоря немного большее определяемого
0 напряжением на выходе эталонного звена 4, то благодаря нелинейным свойствам диодов мостовой схемы 29 и диодов ЗО и 31 в случае использования в качестве управлякчцего элемента 5 схемы
5 фиг. 2 значение тока якорной цепи поддерживается меньшее.
Напряжение на выходе эталонного звена 4 определяется после достижения уровня напряжения ограничения напряжением
0 подпора на выходах постоянного тока диодной мостовой схемы 18. Это напряжение подпора создается на выходе суммирующего усилителя 19 в соответствии с законами коммутации в функции напря5жения на выходе первого блока 20 нелинейности, т.е. в функции тока возбуждения, измеряемого датчиком 8 я модуле напряжения на якоре электродвигателя, измеряемого датчиком модуля 7 напряОжения.
Кроме изменения напряжения эталонного звена по законам коммутации возможно уменьшение напряжения эталонного звена 4 и, следовательно, тока якоря электродвигателя при перегревах обмотки, когда напряжение на выходе датчика 9 станет больше напряжения открьшания стабилитрона 10.
Скорость изменения напряжения на выходе эталонного звена, а следовательно, и тока якоря электродвигателя, регулируется изменением эквивалентного сопротивления транзистора 22. t Изменение эквивалентного сопротив- ления транзистора 22 происходит вследствие изменения напряжения на выходе усилителя 23 в соответствии с законами коммутации, так как ко аходу усилителя 23 присоединены выход датчика модуля напряжения на якоре 7 и через второй блok 24 нелинейности датчик тока возбуждения. Кроме того, недопустимая высокая скорость нарастания ускорэния может привести к рящу повреждений, в том числе муфты электродвигателя, поэтому скорость нарастания тока ограничивается- и по этому параметру при помощи датчика 11 и стабилитрона 12
При достижении напряжением на выхоД9 эталонного звена 4 максимально допустимого значения нанряжеэние на выходе диодного моста 18 становится больше напряжения на вьрсоде суммирующего усилителя 19, вследствие чего через внутреннее сопротивление последнего потечет ток и, в результате образовавшейся обратной отрицательной связи между входом и выходом эталонного звена 4 его напряжение перестает расти. Эталонное звено 4 в этом режиме играет роль источника переменного напряжения сравнения, В результате и в этом режиме величина тока якоря ограничивается в функции параметров, подведенных ко входам суммирующего усилителя 19, а именно: модуля напряжения на якоре, снимаемого с выхода датчика 7, величины магнитного потока, формируемого на выходе первого блока 20 нелинейности и подключенного своим входом к датчику 8 тока возбуждения, превьпиения температуры обмоток якорной цепи, вьщеляеМой в виде напряжения датчиком 9.
При достижении заданной частоты вращения якорем 1 электродвигателя начинает уменьшаться сигнал задания на входе всей схемы. При уменьшении сигнала задания до уровня не вызываюшего запирания диодной схемы 18, напряжение на выходе эталонного звена 4 не меняется, а на входе регулятора тока
3уменьшается Поэтому происходит перестройка режимов управляющего элемента 5, уменьшение обратной связи между В.ХОДОМ и выходом регулятора 3, которая обеспечивает с некоторой точностью поддержание тока якоря 1 на уровне, опр&деляемом условиями коммутации и нагрева. Таким образом обеспечивается лучшее заполнение токовых диаграмм
При дальнейшем уменьшении сигнала задания напряжение на выходе эталонного звена 4 становится меньше, диодньй мост 18 запирается и сигнал на выходе эталонного звена 4 уменьшается. Скорость изменения этогонапряжения определяется постоянной времени эталонного звена и скоростью изменения напряжения на входе.
При переходе в тормозной режим процессы протекают идентично, но полярности отличаются. Никаких особенностей предлагйймая схема в этом режиме, как
4в .тормозном режиме, не имеет.
Характер процессов определяется параметрами модели. Поэтому процессы инвариантны по отношению к изменению параметров контура тока якоря. Изменение статического момента на валу влияет на продолжительность процесса разгона и торможения электродвигателя. На величину предельного тока статический момент влияет только при перегревах.
Положительный эффект, достигаемый в результате использования устройства для регулирования тока якоря, состоит в сведении к минимуму отклонения тока якоря от оптимального и обеспечении инвариантности регулирования тока якоря компенсировании в практически возможном диапазоне изменений и возмущений, действуюмдих на контур регулятора тока якоря; учета коммутационньос ограничений для тока якоря и предельном использовании коммутационных возможностей электродвигателя и при двухзонном управлении скоростью и возможности изменения скорости нарастания тока и момент электродвигателя в широких пределах в зависимости от погребности.
Формула изобретения
1, Устройство для регулирования тока якоря электродвигателя, содержащее электродвигательпостоянного тока, р&гулируемый вентильный преобразователь, регулятор тока якоря и датчик тока якоря, отличающееся тем, что, с целью повышения стабильности токовых диаграмм в динамических режимах при более полном использовании возможнсхзти электродвигателя, в устройство введены эталонное апериодическое звено с обратными связями по коммутациойным и динамическим пара-
метрам и удравляющий элемент, вклк ченный между выходом и входом регулятора тока якоря, причем вход эталонного., апё|:)иодического звена подсоединен ко Ёходу регулятора тока якоря, а
выход упомянутого звена подключен к регулирующему входу упр1авлякиаего элемента, к которому через дополнительно введенный инвертирующий усилитель подключен датчик тока якоря.
2. Устройство по п. 1, о т л и ч а - ю щ е е с я тем, что в цепь обратной связи эталонного апериодического звена входами переменного тока включен диод136ный мост, к выходам постоянного тока которого встречно подключен выход суммирующего усилителя, ко входам котореьго параллельно присоединены дополнительный датчик модуля напряжения на якоре, через дополнительный первый блок нелинейности - датчик тока возбуждения, а также соединенный последовательно с пороговым элементом дополнительный датчик температуры якорных обмоток. 3.Устройство по пп- 1 и 2, отличающееся тем, что управляющий элемент выполнен в виде блока умножения, один из входов которого является регулирующим 4.Устройство по пп. 1 и 2, о тличающееся тем, что управляю щий элемент вьшрлнен в виде диодно мостовой схемы с транзистором, причем к выходам постоянного тока диодно-мостовой схемы подключен переход эмиттерколлектор транзистора, переход эмиттербаза которого служит регулирующим входом управляющего элемента. 5.Устройство по пп. 1-4, отличающееся тем, что, с целью и; менения постоянной времени эталонного 9 апериодического звена, между его входом и выходом включены входы переменного тока второго диодного моста, к выходам постоянного тока которого присоединен переход эмиттерн-коллектэр дополнительного транзистора, а к переходу эмиттербаза последнего подключен дополнительный суммирующий элемент, ко входу которого параллельно подключены датчик модуля напряжения на якоре к выход второго дополнительного блока нелинейности, ко В.ХОДУ которого подключен датчик тока возбуждения. 6. Устройство по пп. 1-5, отличающееся тем, что ко аходу дополнительного суммирующего элемента последовательно с пороговым элементом подключен датчик скорости нарастания ускорения. Источники информации, принятые во внимание при экспертизе 1.Журнал Летеп Zeitschrtfi В 42, 1968, № 9, 765-868. 2,Гарпов В. К. и др. Унифицированные системы автоматического управления электроприводом в металлургии , М,, Металлургия, 1971, с. 84-86.
efV i
fui. 2
| название | год | авторы | номер документа |
|---|---|---|---|
| Электропривод постоянного тока | 1977 |
|
SU692044A1 |
| Способ управления электроприводом постоянного тока и устройство для его осуществления | 1977 |
|
SU705632A1 |
| ЭЛЕКТРОПРИВОД ПОСТОЯННОГО ТОКА | 1990 |
|
RU2011286C1 |
| Способ управления электроприводом постоянного тока и устройство для его реализации | 1979 |
|
SU855910A1 |
| ТИРИСТОРНЫЙ ЭЛЕКТРОПРИВОД НЕГОДЫ | 1989 |
|
RU2020715C1 |
| Электропривод постоянного тока | 1977 |
|
SU729800A1 |
| Электропривод постоянного тока с упреждающим токоограничением | 1978 |
|
SU1105999A1 |
| Способ управлеия электродвигателем постоянного тока и устройство для его реализации | 1979 |
|
SU873367A1 |
| Устройство для регулирования тока якоря электродвигателя | 1979 |
|
SU860247A2 |
| НЕРЕВЕРСИВНЫЙ ЭЛЕКТРОПРИВОД ПОСТОЯННОГО ТОКА | 1989 |
|
RU2020714C1 |