(54) ДИНАМОМЕТР
| название | год | авторы | номер документа |
|---|---|---|---|
| Динамометр для измерения сил резания | 1990 |
|
SU1732194A1 |
| УСТАНОВКА ДЛЯ ИСПЫТАНИЙ МОДЕЛЕЙ СУДОВЫХ ДВИЖИТЕЛЕЙ | 2001 |
|
RU2216476C2 |
| Трехкомпонентные магнитоэлектрические весы | 1975 |
|
SU524977A1 |
| Устройство для градуировки динамометров с двумя опорными базами | 1981 |
|
SU972286A1 |
| Датчик измерительной балки | 1990 |
|
SU1778547A1 |
| СТЕНД ДЛЯ ИЗМЕРЕНИЯ СТАТО - ДИНАМИЧЕСКИХ ХАРАКТЕРИСТИК ФИЗИЧЕСКИХ ОБЪЕКТОВ | 2013 |
|
RU2562445C2 |
| Двухкомпонентный динамометр | 1978 |
|
SU885838A1 |
| СТЕНД ДЛЯ ИЗМЕРЕНИЯ МАССЫ, КООРДИНАТ ЦЕНТРА МАСС И ТЕНЗОРА ИНЕРЦИИ ИЗДЕЛИЯ | 2010 |
|
RU2434213C1 |
| Датчик крутильных колебаний | 2016 |
|
RU2615915C1 |
| ИЗМЕРИТЕЛЬ ОСЕВЫХ СИЛ В КАНАТНО-ПУЧКОВОЙ АРМАТУРЕ | 2013 |
|
RU2527129C1 |

I
Изобретение отнсх;ится к измерительной технике, в частности к измерениям сил и моментов на вращающтася валах, и может быть использовано в аэродинамических исследованиях.
Известны дннамометрь для измерения сил ,и моментов, содержащие упругую систему, состоящую из подвижного и неподвижного оснований, укрепленных в разрыве вращающего вала и связанных между собой упругими балками с тензодатчиками, расположенными по радиусу, и токосъемники (1.
Недостатком известных динамометров является то, что наличие токосъемника в передающей цепи ухудшает надежность работы динамометра и понижает точность измерения сил.
Наиболее близким по технической сущности к предлагаемому динамометру является силоизмерительный датчик, содержащий подвижное и неподвижное основания жестко закрепленные в разрыве врашаю1цегося в корпусе вала и связанные между собой упругими стойками, силоизМерительньге элементы с жестким средним звеном и рабочие и компенсационные датчики, включенные в измерительные мосты.
Сигнал снимаемый с датчиков поступает на измерительную аппаратуру через токосъемник 2.
Недостатком известного силоизмерительного датчика также является низкая точность и на дежность устройства из-за наличия тснсосъемника.
Цель нзобретения - повышение точности и надежности измереиия сил и моментов на вращающихся валах.
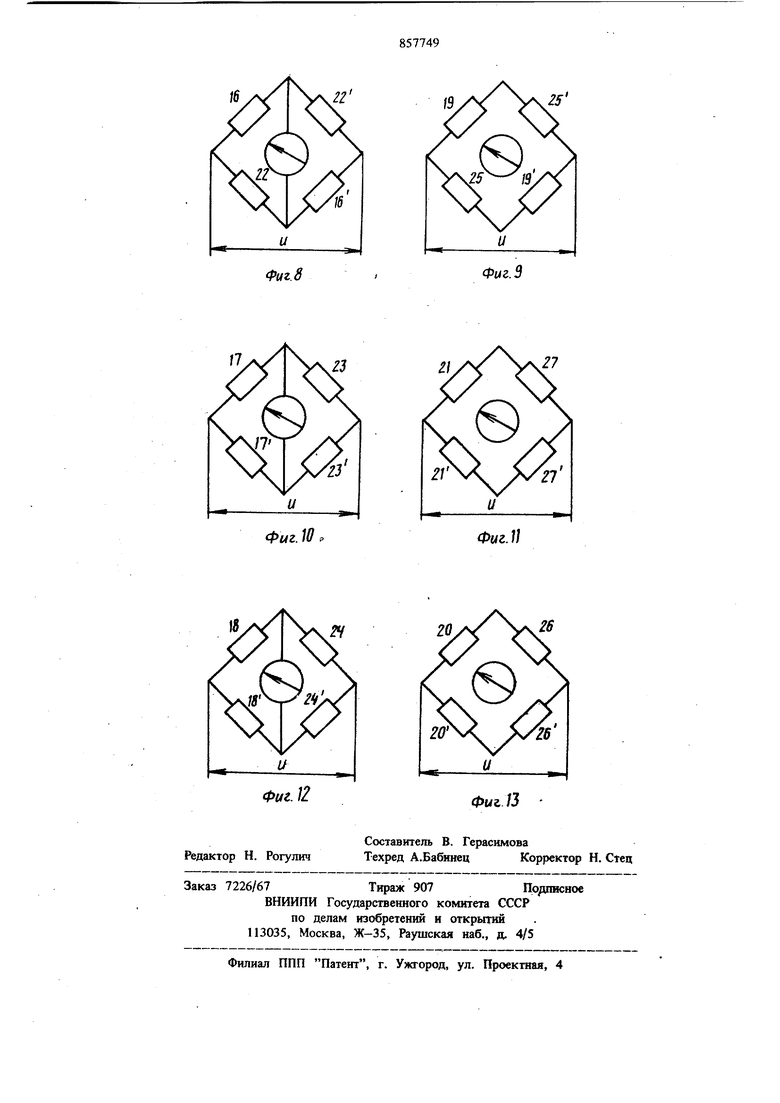
Указанная цель достигается тем, что в устройство введен активный приемник деформации, выполненный в виде двух соосных с валом колец, связанных упругими шарнира- ми с жестким средним звеном силоизмернтельных элементов, и дополнительный приемник деформации в виде кольца, расположениого соосио с валом, и жестко связанного с неподв1юкным основанием, а датчики каждого измеряемого компонента закреплены на корпусе над соответствующими кольцами активного приемника деформации и ориентированы таким образом, что над приемником, деформации расположена пара симметрично устзнояленных рабочих датчиков, включенных в измерительный мост, а соответствующая им пара компенсационных датчиков, включенных в этот же мост, расположена над дополнительным приемником деформации, при этом измерительные оси этих датчиков параллельны оси вала и лежат в радиальной плоскости вала, а продольная ось упругих стоек перпендикулярна указанной плоскости в точке сое-динения стоек с -основанием. На фиг, 1 показан динамометр, общий вид на фиг. 2 - разрез А-А на фиг. 1; на фиг. 3 - вид Б на фиг. 1; на фиг. 4 - разрез В-В на фиг. I; на фиг. 5 - разрез Г-Г на фиг. 1; на фиг. 6 - разрез Д-Д на фиг. 1; на фиг. 7 - разрез Е-Е на фиг. 1; на фиг. 8-13 - электрические схемы соединения датчиков для измерения каждого из шести компонентов. Динамометр состоит из неподвижного основания 1, закрепленного на валу 2, вращающемся в корпусе 3 и подвижного основания 4, закрепленного на валу 5, являющимся продолжением вала 2. Измеряемые силы и моменты приложены к валу 5. Основания 1 и 4 связаны между собой упругими стойками 6, продольная ось 7 которых в точке заделки стоек с основанием 1 Гточка А) пер пендикулярна плоскости, проходящей через ос вала (п.юскость ХОУ). Силоизмерительные эле менты двух видов 8 и 9 также связанные с основаниями 1 и 4 содержат два упругих элемента 10 и х есткое среднее звено 11, которос связано упругим щарниром 12 с активным приемником деформации в виде двух колец 13 и 14. Каждое кольцо закреплено на трех силоизмерительных элементах одного вида. На основании 1 закреплен еще один дополнительный приемник деформатдаи - кольцо 15. Над кол цами 13-15 на корпусе 3 закреплены датчики, катушки индуктивных датчиков 16-27 и еще столько же катушек 16-27, расположенных симметрично обозначенным. Измерител ные оси катушек каждого измеряемого компонента (измерительная ось - ось симметрии катушки, совпадающая с направлением измеряемого перемещения) параллельные оси вала и лежат в плоскости, проходящей через эту ось. Катушки собраны в измерительные мосты. Каждый измерительный мост предназначен для измерения одного компонента и содержит две активные катушки, которые расположены симметрично над активными приемниками деформации 13 и 14 и две компен сационные катушки, которые расположены симметрично над дополнительным приемником деформации 15. Действие- крутящего момента My вызывает растяжение стоек 6, что приводит к перемещению подвижного основания 4 относительно неподвижного основания 1. В силоизмерительном элементе 8 это перемещение вызывает поворот и перемещение жесткого среднего звена 11, вместе с перемещается щарнир 12 и кольцо 13. Так как кольцо 13 закреплено на трех симметрично расположенных силоизмерительных элементах, то кольцо 13 перемещается вдоль оси вала. Величина перемещения кольца 13 пропорциональна длине жесткого среднего звена 11 от заделки упругих элементов 10 до заделки щарнира 12. Это перемещение измеряют активные катушки 19 и 19 в мосте (фит. 9). Б процессе работы конец вала 2 вместе с основанием 1 может перемещаться относительно корпуса 3 вследствие температурного удлинения вала, так как при работе выбираются люфты в подшипниках и по др. причинам. Это вызывает дополнительное перемещение кольца 13 и кольца 15 на одну и ту же величину, которая измеряется в мосте одновременно активными катушками 25 и 25. Такое перемещение не вьгзывает разбаланса моста .и не влияет на величину измеряемого сигнала. Действие силы X смещает основание 4 и кольцо 13. Действие силы Y вызь1вает перемещение основания 4 по линии действия силы относительно основания 1 за счет деформации стоек 6, причем если стойка сжимается, то две других стойки растягиваются. Поэтому кольцо 13 в точке закрепления с измерительным элементом 8. расположенным около сжатой стойки, пойдет вниз, а в точках закрепления около растянутых стоек вверх. Кольцо 13 перекосится. Этот перекос . фиксируется активными катушками 21 и 21 в мосте (фиг. 11). Компенсационные катушки 27 и 27 работают аналогично компенсационным катушкам компонента. Измерение силы Z происходит аналогично силе Y (фиг. 13). Таким образом, с помощью кольца 13 можно измерить крутящий момент М и Р диальные усилия Y и Z Остальные три компонента - осевая сила X и продольные моменты My и измеряются подобным образом посредством измерительного элемента 9, приемника деформации 14, и измерительных схем соответственно (фиг. 8, 12 и 10). Предлагаемый динамометр позволяет исключить из схемы измерения токосъемники главный источник высокой погрешности и низкой надежности измерения в обычных схемах на валах больших диаметров. Указанное расположение стоек 6 позволя ет разместить их более компактно между осн(Аанпями 1 и 4. При сохранении габаритов динамометра постоянными, это расположение позволяет сДелать основания 1 и 4 более жесткими и за счет уменьшения деформации оснований повысить точность и на дежность измерений. Формула изобретения Динамометр, содержащий подвижное и неподвижное основания жестко закрепленные в разрыве вращающегося в корпусе вала и связанные между собой упругими стойками, силоизмерительные элементы с жестким средним звеном и рабочие и компенсационные датчики, включенные в измерительные мосты отличающийся тем, что, с целью повыщения точности и надежности измерения сил и моментов на вращающихся валах, в него введен активный приемник деформации, выполненный в виде двух соосны с валом колец, связанных упругими щарнира ми с жестким средаим звеном силоизмерител ных элементов, и дополнительный приемник деформации в виде кольца, расположенного соосно с валом, и жестко связанного с неподвижттм основанием, а дапики каждого измеряемого компонента закреплены на корпусе над соответствующими кольцами активного приемника деформации и ориентированы таким образом, что над приемником деформа ции расположена пара симметри1то установленных рабочих датчиков, включенных в нэмерительный мост, а соответствующая им пара компенсацио1тых датчиков, включенных в этот же мост, расположена над дополнительным приемником деформации, при этом измерительные оси этих датчиков параллельны оси вала и лежат в радиальной плоскости вала, а продольная ось упругих стоек перпендикулярна указанной плоскости в точке соединения стоек с основанием. Источники информации, принятые во внимание при экспертизе 1.Патент США N 3985025, кл. 73-141, опублик. 12.10.76. 2.Патент Великобритании N 1530796,. кл. G 1 N, опублик. 01.11.78 (прототип).
11
Фиъ.5 l2A
22
16
Фиг.8
1
гз
Фиг. W.
25
В
Фиг.В
27
21
Фмг.1/
