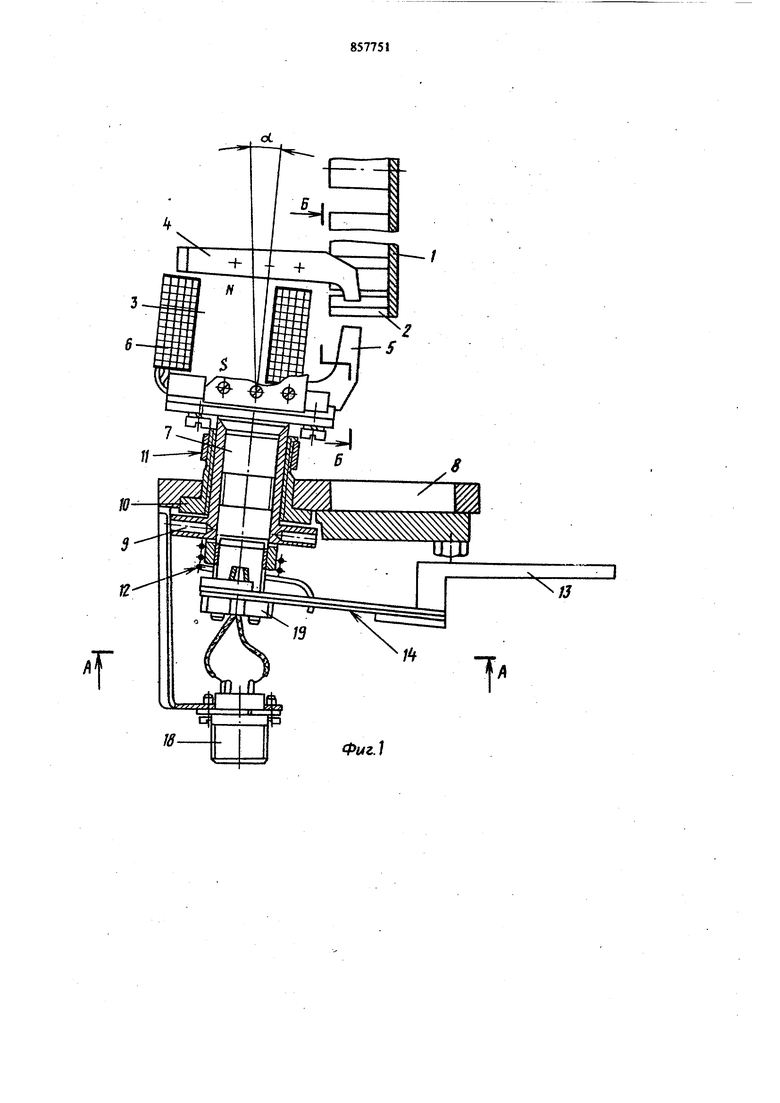
изобретение относится к контрольно-измери тельной технике и может быть использовано в качестве датчика скорости для получения сигналов частоты вращения в двух сечениях гибкого вала фазового измерителя крутящего момента. J Известны частотные датчики скорости вращения вала, используемые для реализации фа зового измерителя крутящего момента и содержащие индуктор в виде зубчатого колеса, жестко скрепленный с вращающимся валом, и магйитную систему в виде постоянного магнита с двумя полюсными наконечниками и обмоткой {1). Недостатком зтих устройств является зависимость амплитуды выходного сигнала от изменшия воздущного зазора в магнитной цепи при радиальных смещениях датчика. Наиболее близким к предлагаемому по тех юпеской сущности является датчик скорости фазового измерителя крутящего момента, содержащий индуктор, связаннь|й с вращающимся валом и выполненный в виде стакана с зубьями на его цилиндрической поверхности. и размещенные на неподвижном основании постоянный магнит П-образной формы с полюсными наконечниками и обмотку 2. Однако этот датчик также обладает низкой точностью измерения из-за зависимости амплитуту выходного сигнала от радиальных смещений датчика и невозможности регулирования воздущного зазора между зубьями индуктора и полюсными наконечниками постоянного магнита. Цель изобретения - повышение точности измерения. Указанная цель достигается тем, что в датчике зубья индуктора расположены симметрично между полюсными наконечниками постоянного магнита, который установлен на неподвижном основании с помощью поворотного коромысла, при этом ось поворота коромыс- . ла расположена х тносительно плоскости перпендикулярной оси вращения вала под углом (, , выбранп 1М из следующего соотношенияcC-Av csiTi где f - радиус кривой траектории перемещения полюсных наконечников постоянного магнита; R - радиус зубьев индуктора. На фиг. 1 показано устройство, общий вид на фиг. 2 - А-А на фиг. 1; на фиг. 3 - разрез Б-Б на фиг. 1; на фиг. 4 вид В на фиг. 3.
В состав датчика входят вращающийся ферромагнитный индуктор 1 с зубьями 2, постоянный магнит 3, полюсные наконечники 4 и 5; обмотка 6, коромысло 7, основание 8, втулка 9 резьбовая, гайка разрезная 10, скоба 11, пружина 12 кручения, ручка 13, пружина 14 плоская, винт 15 регулировочный, гайка 16 ходовая, крыщка 17, разъем 18 электрический и гайка 19,
Постоянный магнит 3 с обмоткой 6 и полюсными наконечниками 4 и 5, которые охватывают зубья 2 индуктора 1, закреплены на коромысле 7, вращающемся вокруг своей оси во втулке 9 резьбовой, установленной в гайке 10 разрезной, обжатой для устранения люфтов скобой 11 и запрессованной в основание 8, на котором установлены винт 15 регулировочный, сопряженный с пружиной 14 плоской посредством выступа гайки 16 ходовой и закрепленной на ней ручкой 13, крышка 17, закрывающая окно в основании 8 и служащая для визуального контроля положеНИЛ полюсных наконечников 4 и 5 относительно зубьев 2 индуктора, электрический разъем 18, на который выведены выводы обмотки 6.
Для ограничения возможных относительных перемещений при вибрации коромысло 7 дополнительно имеет коническую поверхность, которой опирается коническую фаску в верхнем торце втулки 9. Зажимной гайкой, изображенной внутри пружины 12, регулируется свободное вращение коромысла 7 относительно втулки 9 при отсутствии осевых и радиальных люфтов.
Устройство работает следующим образом. При вращен1т ферромагнитного индуктора 1, связанного с контролируемым валом,
зубья 2 периодически измеряют магнитный поток в магнитной цепи, состоящей из постоянного магнита 3, полюсных наконечников 4,, 5 и воздушного зазора между ними, в результате чего в обмотке 6 возбуждается переменное напряжение с частотой, пропорциог нальной угловой скорости вращения вала.
При регулировании равенства воздушных зазоров в магнитной цепи датчика вращается втулка 9. относительно неподвижных коромыс.ла 7 и. гайки 10. При этом изменяется высота втулки 9 относительно основания 8 и следовательно, положение полюсов 4 и 5 относительно з)бьев индуктора 1. После регулировки угловое положение втулки 9 фиксируется (фиксатор не показан).
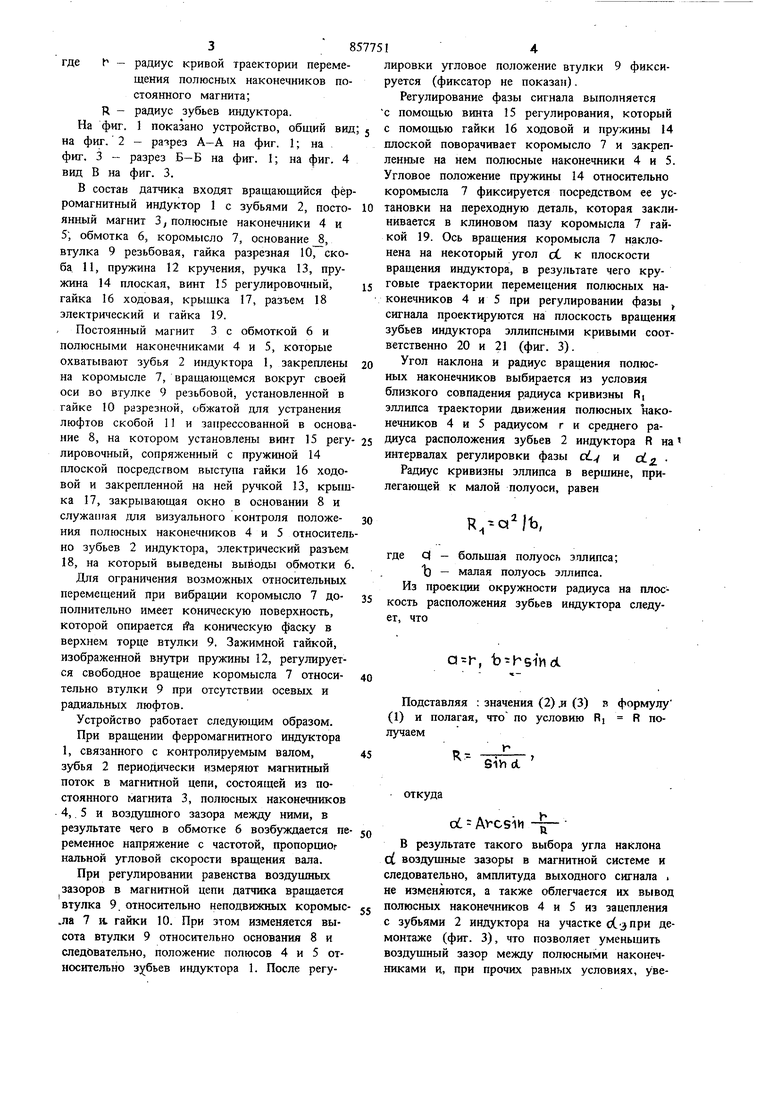
Регулирование фазы сигнала выполняется с помощью винта 15 регулирования, который с помощью гайки 16 ходовой и пружины 14 плоской поворачивает коромысло 7 и закрепленные на нем полюсные наконечники 4 и 5. Угловое положение пружины 14 относительно коромысла 7 фиксируется посредством ее установки на переходную деталь, которая заклинивается в клиновом пазу коромысла 7 гайкой 19. Ось вращения коромысла 7 наклонена на некоторый угол оС к плоскости вращения индуктора, в результате чего круговые траектории перемещения полюсных наконечников 4 и 5 при регулировании фазы сигнала проектируются на плоскость вращения зубьев индуктора эллипсными кривыми соответственно 20 и 21 (фиг. 3).
Угол наклона и радиус вращения полюсных наконечников выбирается из условия близкого совпадения радиуса кривизны RI эллипса траектории движения полюсных наконечников 4 и 5 радиусом г и среднего радиуса расположения зубьев 2 индуктора R на интервалах регулировки фазы cL и cLy. Радиус кривизны эллипса в вершине, прилегающей к малой полуоси, равен
кг-с«Мь,
где с - большая полуось эллипса;
Ь - малая полуось эллипса. Из проекции окружности радиуса на плоскость расположения зубьев индуктора следует, что
, Ъ-hsiyid
Подставляя : значения (2) .и (3) в формулу (1) и полагая, что по условию Rj R получаем
Г
RSihd
откуда
ct Avcsih -
В результате такого выбора угла наклона о( воздушные зазоры в магнитной системе и следовательно, амплитуда выходного сигнала . не изменяются, а также облегчается их вывод полюсных наконечников 4 и 5 из зацепления с зубьями 2 индуктора на участке (Х.эпри демонтаже (фиг. 3), что позволяет уменьшить воздушный зазор между полюсными наконечниками и, при прочих равных условиях, увеличить магнитный поток магнитной цепи датчика и повысить амплитуду сигнала.
При демоцтаже отпускают стопорный винт (не показан) и с помощью ручки 12 изгибают пружину 13 плоскую вниз (фиг. 1), при этом она выходит из сопряжения с выступом гайки 16 ходовой и может свободно повернуться совместно с коромыслом 7 на угол 90°, обеспечивающий расцепление полюсных наконечников магнитной системы датчика с зубьями индуктора, после чего магнитная система датчика с деталями установки и регулировки свободно удаляется.
Для устранения люфтов в механизме регулировки установлена пружина 11 кручения. Конструкция датчика позволяет его установку на герметичных кожухах газовых турбин.
Такое расположение магнитной системы датчика относительно индуктора и на неподвижном основании позволяет добиться того, что сумма воздуишых зазоров между верхним полюсом и зубом, а также между зубом и нижним полюсом всегда остаются величиной постоянной. Поэтому при радиальных смещениях датчика уменьшение зазора у одного из полюсов компенсируется равным увеличением зазора у другого полюса, в результате магнитный поток остается без изменения и сигнал от радиальных пере мещений зуба отсутствует, а возможность поворота полюсных наконечников позволит регулировать фазу сигнала, что в конечном итоге повыщает точность измерения.
Формула изобретения Частотный датчик скорости, содержащий индуктор, связанный с вращаюн1имся валом и выполненный в виде стакана с зубьями на его цилиндрической поверхности, и размещенные на неподвижном основании постоянный магнит П-образной формы с полюсными наконечниками и обмотку, отличаю щи йс я тем, что, с целью повышения точности измерений за счет уменьшения зависимости ам литуды сигнала от радиальных перемещеннй датчика, в нем зубья индуктора расположены симметрично. Между полюсными наконечниками постоянного магнита, который установлен на неподвижном основании с помощью повороного коромысла, при этом ось поворота коромысла расположена относительно плоскости, перпендикулярной оси вращения вала под углом d, , выбранным из следующего соотношения
d Arcsih ,
где г - радиус круговой траектории перемещения полюсных наконечников постоянного магнита; R - радиус зубьев индуктора.
Источники информации, принятые во внимание при экспертизе
1.Авторское свидетельство СССР Jf 714182 кл. G 01 L 3/10, 1976.
2.Одиней С. С. и pp. Средства измерения крутящего момента. 1977, с. 60, рис. 3 (прототип) .
Д-А
Фиг.2
-/
| название | год | авторы | номер документа |
|---|---|---|---|
| МАГНИТОИНДУКЦИОННЫЙ ДАТЧИК ЧАСТОТЫ ВРАЩЕНИЯ | 1994 |
|
RU2122742C1 |
| ГЕНЕРАТОР ПЕРЕМЕННОГО ТОКА | 1998 |
|
RU2143169C1 |
| МОДУЛЬНЫЙ ВЕНТИЛЬНЫЙ ЭЛЕКТРОМЕХАНИЧЕСКИЙ ПРЕОБРАЗОВАТЕЛЬ (МВЭП) | 2006 |
|
RU2310966C1 |
| Двухканальный датчик крутящего момента вращающегося вала | 1988 |
|
SU1802302A1 |
| Устройство измерения крутящего момента вала | 2022 |
|
RU2795384C1 |
| ДАТЧИК СКОРОСТИ ВРАЩЕНИЯ ВАЛА | 1997 |
|
RU2125730C1 |
| Синхронная переменнополюсная электрическая машина | 1973 |
|
SU599316A1 |
| ГРАВИРОВАЛЬНОЕ УСТРОЙСТВО (ВАРИАНТЫ) | 2010 |
|
RU2429139C1 |
| МАГНИТНАЯ ОПОРА ВЕРТИКАЛЬНОГО РОТОРА | 2006 |
|
RU2328348C1 |
| Магнитный редуктор | 2019 |
|
RU2707731C1 |