(54) УСТРОЙСТВО ДЛЯ ПЕРЕДАЧИ ИНФОРМАЦИИ СО СЖАТИЕМ



| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для передачи информации со сжатием | 1983 |
|
SU1091206A1 |
| Устройство для сжатия информации | 1982 |
|
SU1101872A1 |
| Устройство для сжатия информации | 1988 |
|
SU1536418A1 |
| Устройство для сжатия информации | 1986 |
|
SU1324047A1 |
| ТЕЛЕВИЗИОННЫЙ АДАПТИВНЫЙ ИЗМЕРИТЕЛЬ КООРДИНАТ | 1988 |
|
SU1623536A1 |
| РАДИОЛОКАЦИОННЫЙ ДАЛЬНОМЕР | 1999 |
|
RU2151408C1 |
| Устройство для передачи сообщений с адаптивной дельта-модуляцией | 1981 |
|
SU1025011A1 |
| Устройство для отображения графической информации на экране электронно-лучевой трубки | 1980 |
|
SU940213A1 |
| Телеизмерительная система | 1977 |
|
SU682936A1 |
| Устройство для разделения направлений передачи в дуплексных системах связи | 1989 |
|
SU1672575A2 |
Изобретение относится к системам преобразования сигналов и может быть использовано в телеметрии и в системах обработки информации, использующих адаптивные методы сжатия данных. В науке и технике широкое развитие получили адаптивные методы сжатия данных, представляемых выборками непосредственно измеряемого сигнала. Однако из-за ряда недостатков таких систем, например избыточности данных, сильных влияний помех на измерение и по ряду других причин, в некоторых случаях измеряемый сигнал необходимо представлять в виде коэффициентов разложения по ортогональиьн базисным сигналам. Наиболее интенсив но в последнее время стали развивать ся cиcтe в l, использующие для обработ ки- сигналы в базисах кусочно-постоян ных функций, в частности, сигналы в базисах Уолша. Это объясняется возможностью применения дискретиой техники при построении таких систем. Известен адаптивный метод сжатия с использованием ортогональных разложений, заключающийся в том, что на определенном интервале времени контролируемый сигнал разлагается по базисным ортогональным сигналам и представляется в виде спектрального разложения с заданным числом спектральных составляющих. Затем осуществляется восстановление сигнала и оценка точности восстановления на краях интервала разложения. В случае, если ошибка, т.е. разность между исходньм и восстановленным сигналом не превышает допустимое значение,, интервал разложения увеличивается на один шаг, и вся процедура повторяется сначала. Если ошибка больше допустимого значения, то процедура аппроксимации прекращается и результаты вьщаются иа выход СО Известно также устройство, частично реализукщее данный метод и содержащее ячейку памяти, интегрирующее 38 блоки, блоки змножения, матричную пересчетную схему, сумматор, вычитаюЩие устройства, блок сравнения, ключевую схему, схему управления и блок буферной памяти. В данном устройстве длина интервала разложения задается априорно L21. Недостатком такого устройства как и самого метода является то, что все вычисления, связанные с расчетом спектральных составляк1цих,при увеличении интервала аппроксимации приходится выполнять с самого начала. Изза этого временные затраты на обработку измеряемого сигнала велики, кроме того, необходимо запомнить значение сигнала на всем интервале anпроксимации. Наиболее близким к предлагаемому является устройство анализатора Уолш содержащее генератор импульсов,генератор опорных сигналов,модуляторы,ин теграторы ,блок управления,регистр .сдвига,причем вход генератора опорны сигналов соединен с выходом генерато ра импульсов,первый выход подключен входу блока управления, выходы генератора опорных сигналов соединены с первыми входами соответствукнцих мо дуляторов, вторые входы которых соединены между собой и подключены к входу устройства, выходы модуляторов подключены к первь&1 входам соответст вукицих интеграторов, вторые входы ко торых подключены к первому выходу блока управления, выходы интеграторо соединены с первыми входами соответствуюащх блоков памяти, вторые входы которых подключены ко второму выходу блока управления, выходы соединены с соответствую1цими информационными входами регистра сдвига, управлякнций вход которого подключен к выходу блока управления 31. Недостатком такого устройства является то, что разложение анализируемого сигнала осуществляется строго на фиксированном интервале времени, при изменении интервала аппроксимации анализ измеряемого сигнала необходимо начинать с начала, что снижает быстродействие устройства. Цель изобретения - повышение быст родействия устройства. Эта цель достигается тем, что в устройство для передачи информации со сжатием, содержащее генератор импульсов , первый выход которого соединен со входом генератора опорных сигналов, второй выход - с первым входом блока управления, выходы генератора опорных сигналов соединены с первыми входами модуляторов, вторые входы которых объединены и подключены ко входу устройства, выходы модуляторов соединены с информационными входами интеграторов, выходы которых соединены с информационными входами блоков памяти, выходы блоков памяти соединены с соответствующими выходами устройства и информационными входами регистра сдвига, управляющий вход которого соединен с первым выходом блока управления, второй и третий выходы которого соединены соответственно с первыми управляющими входами интеграторов и управляющими входами блоков памяти, введены аналоговый сумматор, умножитель и блок сравнения, выход которого соединен со вторым входом блока управления, четвертый выход которого соединен с управляющими входами аналогового сумматора и умножителя, информационный вход которого соединен с выходом регистра сдвига,выход - с дополнительным выходом устройства, выход аналоговвго сумматора соединен с первым входом блока сравнения, второй вход которого соединен со входом устройства, выход - со вторым входом блока управления, пятый выход которого соединен со вторым входом генератора опорных сигналов, выход .первого блока памяти соединен со вторым управляющим входом второго интегратора, выход каждого следующего i-ro блока памяти соединен со вторыми управляющими входами (21- 1) и 2i-ro интегратора, выходы всех блоков памяти соединены с соответствующими информационными входами аналогового сумматора. В предлагаемом устройстве осуществляется разложение анализируемого сигнала ортогональном базисе Уолша, адаптивное к сигналу по интерва-. лу разложения, при этом с увеличением интервала разложения пересчет козффициентов разложения осуществляется из коэффициентов, рассчитанных на предыдущем этапе аппроксимации. Это позволяет сократить число вычислений, а следовательно и время обработки, обрабатьгоать сигнал в темпе поотупления и отказаться от необходимости запоминать .значения всего сигнала на интервале разложения.
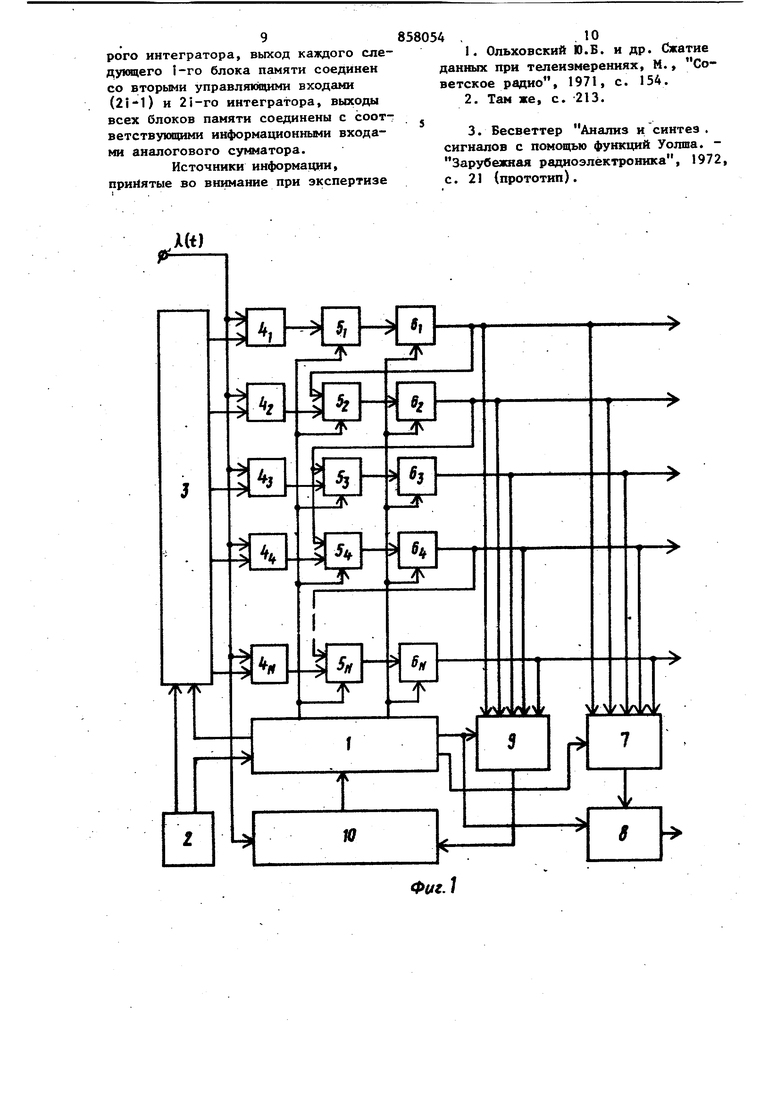
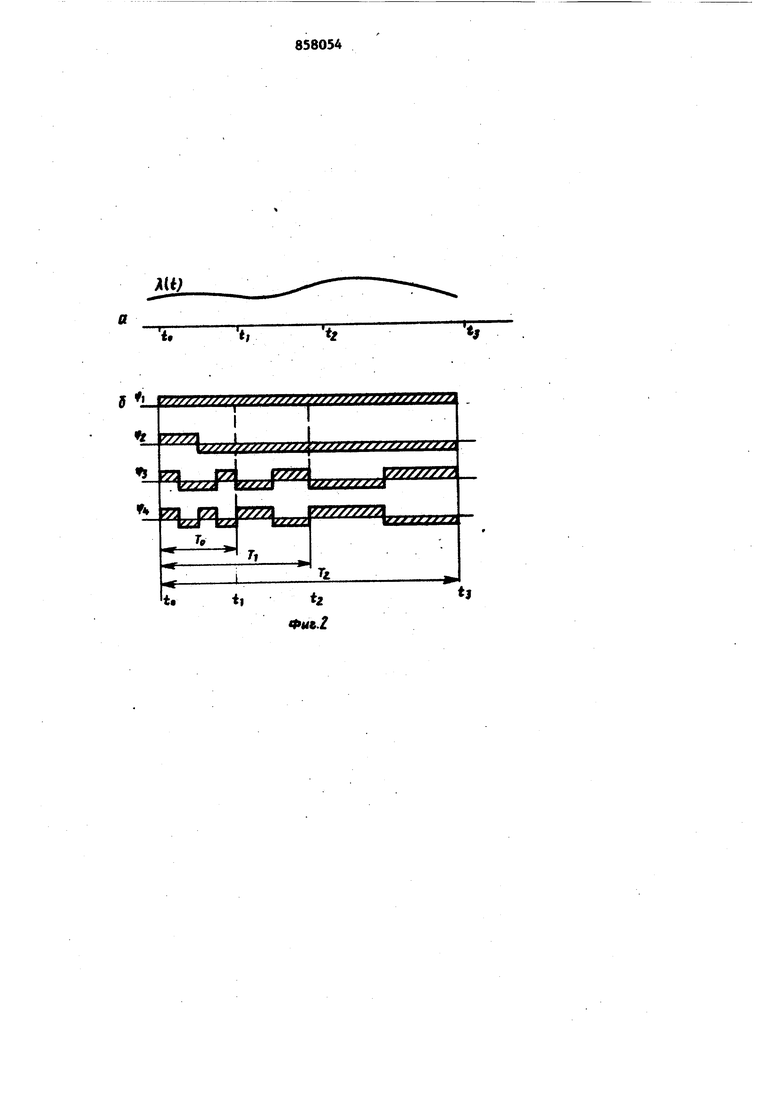
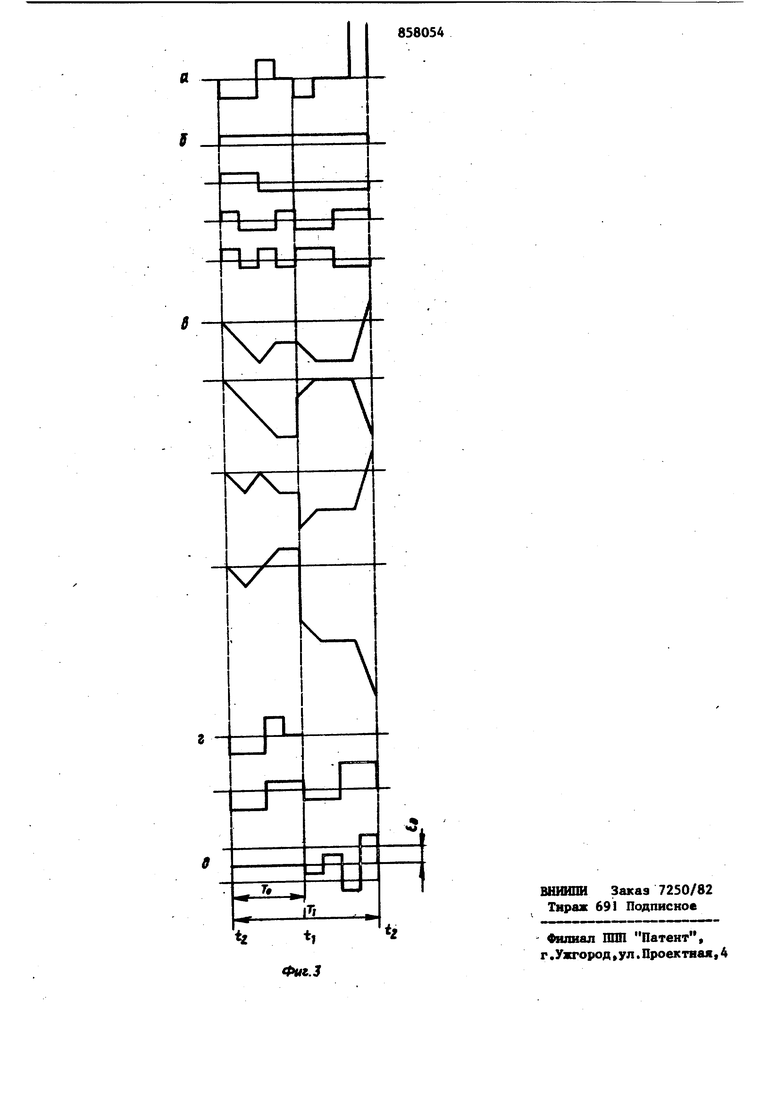
Нд фиг. 1 изображена блок-схема предлагаемогоустройства; на фиг. 2 эпюры опорных сигналов, вырабатываемых генератором опорных сигналов; на фиг. 3 - пример эпюр напряжений на выходах устройства.
Устройство содержит (фиг. 1) блок 1 управления, генератор 2 импульсов, генератор 3 опорных сигналов, модуляторы 4-,-4ц, интеграторы , блоки памяти, регистр 7 сдвига, умножитель 8, аналоговый сумматор 9, блок 10 сравнения.
Принцип работы устройства заключается в следующем.
Исходный сигнал X(t) анализируется на интервале разложения Т. В случае, если ошибка аппроксимации меньше допустимой заранее заданной, значение интервала разложения увеличивается вдвое и становится равным 2Т . Коэффициенты разложения на интервале 2Т пересчитываются с использованием уже рассчитанных коэффициентов при анализе измеряемого сигнала X(t) на интервале Тн , после этого снова оценивается ошибка аппроксимации. Еели ошибка больше допустимой, то результаты выдаются на выход устройства и обрабатывается следующий временной интервал,если ошибка аппроксимации меньше, то аппроксимация продолжается дальше.
Устройство работает следующим образом.
Начиная с момента времени tg генератор 3 опорных сигналов вырабатывает сигналы специальной формы, в модуляторах происходит перемножение измеряемого аналогового сигнала Ht) м опорных сигналов, после чего промодулированные сигналы подаются на интеграторы . По истечении начального интервала разложения Т, соответствующего первому приближению в момент времени Ц, блок I управления выдает команду в блоки по которой значение напряжения с интеграторов переписывается в блоки , после чего в аналоговом сумматоре 9 по колонне из блока 1 происходит восстановление и нормировка саппроксимированного сигнала на конце интервала разложения Т в момент времени t, с учетом длины ин
терзала разложения Т-. Значения восстановленного сигнала из аналогового сумматора 9 выдаются в блок 10, где происходит сравнение измеряемого
A(t) и восстановленного г (t) си1 налов.
Если ошибка между сигналом (t) и его восстановленным значением A(t) в момент t не превьш1ает заранее заданную, то на блок 1 управления из блока 10 выдается сигнал, по которому он выдает команду на интеграторы . По этой команде в интеграторы записываются значения сигналов с блоков памяти, а старые сигналы в интеграторах 5 -5 стнраются, теперь в этих интеграторах исходными будут вновь записанные значения .
После этого устройство продолжает анализ исходного сигнала A(t), но уже на интервале , соответствукнцем отрезку времени от 1ддо t,j и осуществляет обработку сигнала на втрой половине интервала разложения Т т.е. на отрезке времени от t до tn и осуществляет обработку сигнала на второй половине интервала разложения Т, т.е. на отрезке времени от t до t , после чего по окончании интервала Т , is момент времени t-, если ошибка аппроксимации на конце интервала Т не превышает заданную, устройство продолжает обработку дальше, при этом интервалом разложения будет отрезок, равный T,j 2Т, т.е.. от to до to, и т.д.
4
Наконец, если при длительности интервала разложения, равной (от t, до tjj, ошибка аппроксимации превысит допус имую, то блок 10 выдает сигнал, цо которому блок 1 управления переписывает значения коэффициентов разложения из интеграторов (1 в блоки памяти и выдает команду на регистр 7 сдвига, по которой значения коэффициентов напряжения из олоков б -6 f памяти переписываются в регистр 7 сдвига и последовательно выдаются в умножитель 8. В умножителе 8 осуществляется умножение коэффициентов спектрального разложетш на нормировочный коэффици eHTVl., учитывающий приделы интегрирования интеграторов , а следовательно, и длину интервала разложения Т.
Значение нормировочного коэффициента К выдается из блока 1 управления и зависит от длины интервала разложения. После этого, сигналы выдаются на выходы устройства. Блок 1 управления обнуляет интеграторы ,, а также вьщает комаеду на генератор 3, KOTOpbdt вырабатывает новую последовательность опорных сигналов (см. фиг. 2 б), и устройство готово к анализу измеряемого сигнала на следупц&4 интервале от яо .равном начальному значению интервала аппроксимации TQ.
При восстановлении сигнала длительность интервала разложения определяется как расстояние мезду момента ш вЕЗдачи пачек значений коэффициентов разложения. .
Пример . Пусть задана ошибка аппроксимации д( фиг. За). Исходный сигнаш Д(1) перемножается в модуляторах с опорньа4и сигналами (фиг. 3 б), при этом напряжения на выходах соответствуюври интеграторов 5 -5f|| имеют вид, показанный на фиг. 3 в. Анализируется первый шаг аппроксимации на интервале Т, расположенном в промежутке от t до t . Восстановленный на первом шаге аппро симации сигнал (эпюра фиг. 3 г в точности повторяет исходный, поэтому ошибка аппроксимации равна нулю. Устройство переходит к анализу следующего интервала аппроксимации Т, рас положенного в промежутке от tjj до t, При этом во второй интегратор 5/ в момент времени L, переписывается исходное напряжение с первого блока памяти, а в третий и четвертый интеграторы 5,j и 5д. переписывается исходное напряжение из блока 6 памяти. После чего сигнал (t) (фиг. За) продолжает обрабатываться на отрезке времени от t до tQ.. По окончании Т ц (точка tg) восстановленш сигнал имеет другую форму (фиг. 3 г). Видно, что ошибка аппроксимации {(.3д превьш1ает допустимую 6д, поэтому далнейшее увеличение интервала аппроксимации прекращается, а значения коэффициентов разложения но1 шруются и выдаются на дополнительный выход. За начало следующего интервала аппроксимации принимается точка t/.
Благодаря предлагаемому методу обработки анализируемого сигнала устройство позволяет сократить число
операций и увеличить быстродействие в два раза. Поскольку обработка анализируемого сигнала ведется в темпе его поступления, то отпадает необходимость в специальном блоке памяти для фиксирования всего анализируемого сигнала на интервале разложения, что упрощает систему и дополнительно сокращает время обработки, так как не надо обращаться к памяти специального запоминающего устройства.
Формула изобретения
Устройство для передачи информации со сжатием, содержащее Ьенератор импульсов, первый выход которого соединен со входом генератора опорных сигналов, второй выход - с первым входом блока управления, выходы генератора опорных сигналов соединены с первыми ВХОДШ4И модуляторов, вторые входы которых объединены и подключены ко входу устройства, выходы модуляторов соединены с информационными входами интеграторов, выходы которых соединены с информационными входами блоков памяти, выходы блоков памяти соединены с соответствующими выходами устройства и информационными входами регистра сдвига, управляющий вход которого соединен с первым выходом блока управления, второй и третий выходы которого соединены соответственно с первыми управляющими входами интеграторов и управляющими входами блоков памяти, отличающееся тем, что, с целью повышения быстродействия устройства, в него введены аналоговый сумматор, умножитель и блок сравнения, выход которого соеда1нен со вторым входом блока управления, четвертый выход которого соединен с управляющими входами аналогового сумматора и умножителя, И1|формационный вход которого соединен с выходом регистра сдвига, выход. - с дополнительн1Л4 выходом . iустройства, выход аналогового сум- / матора соединен с первым входом блока сравнения, второй вход которого соединен со входом устройства, выход со вторым входом блока управления, пятый выход которого соединен со рьт входом генератора опорных сигналов, выход первого блока памяти соединен со вторым управляющим входом второго интегратора, выход каждого следующего t-ro блока памяти соединен со вторыми управляющими входами (2i-1) и 21-го интегратора, выходы всех блоков памяти соединены с соответствующими информационньми входами аналогового су шатора.
Источники информации, принятые во внимание при экспертизе
858054 ,.10
Фиг.1
/
