(54) УСТРОЙСТВО-ДЛЯ ПРЯМОЛИНЕЙНЫХ ПЕРЕМЕЩЕНИЙ ИСПОЛНИТЕЛЬНОГО ОРГАНА
1
Изобретение относится к машиностроению и может быть использовано в качестве устройства для прямолинейного перемещения исполнительного органа, например поляризатора, в антенном устройстве.
Известно устройство для прямолинейного перемещения, содержащее электропривод корпус с направляющими и винтовые пары 1.
Недостатком устройства является невысокая точность останова ме.ханизма при больщих скоростях движения гайки вследствие инерционности всего устройства.
Наиболее близким по технической сущности и достигаемому результату к предлагаемому является устройство для прямолинейных перемещений исполнительного органа, содержащее электропривод, корпус с направляющей, взаимодействующую с ней каретку с исполнительным органом, ведущее звено, взаимодействующее с ведущим звеном ведомое звено, выполненное в виде трубы, внутри которой с обеих сторон установлены подпружиненные в осевом направлении стаканы, регулировочные упоры, установленные на направляющей. Ведущее звено выполнено в виде винта 2.
Недостаток указанного механизма состоит в обеспечении точности остановки исполнительного органа только в его крайних положениях вследствие невозможности перемещения и фиксации регулировочных упоров по всей длине направляющей.
5 В ряде случаев, например, при быстрой перестройке антенного устройства (изменение характера поляризации поля), необходимо перемещать исполнительный орган (в данном случае поляризатор) в зону облуча.Q теля антенны. При этом возникает необходимость в точной настройке положения поляризатора относительно излучателя, т.е. в остановке его в заданном положении.
Цель изобретения - обеспечение точности остановки исполнительного органа в лю15 бом положении.
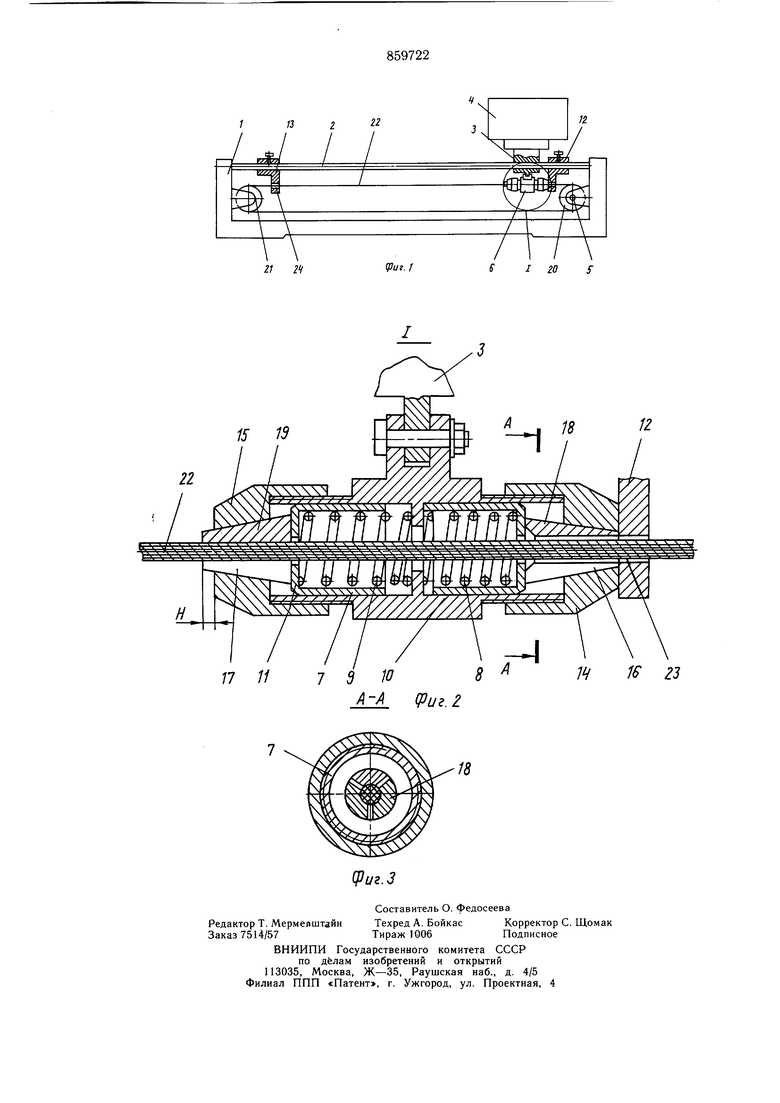
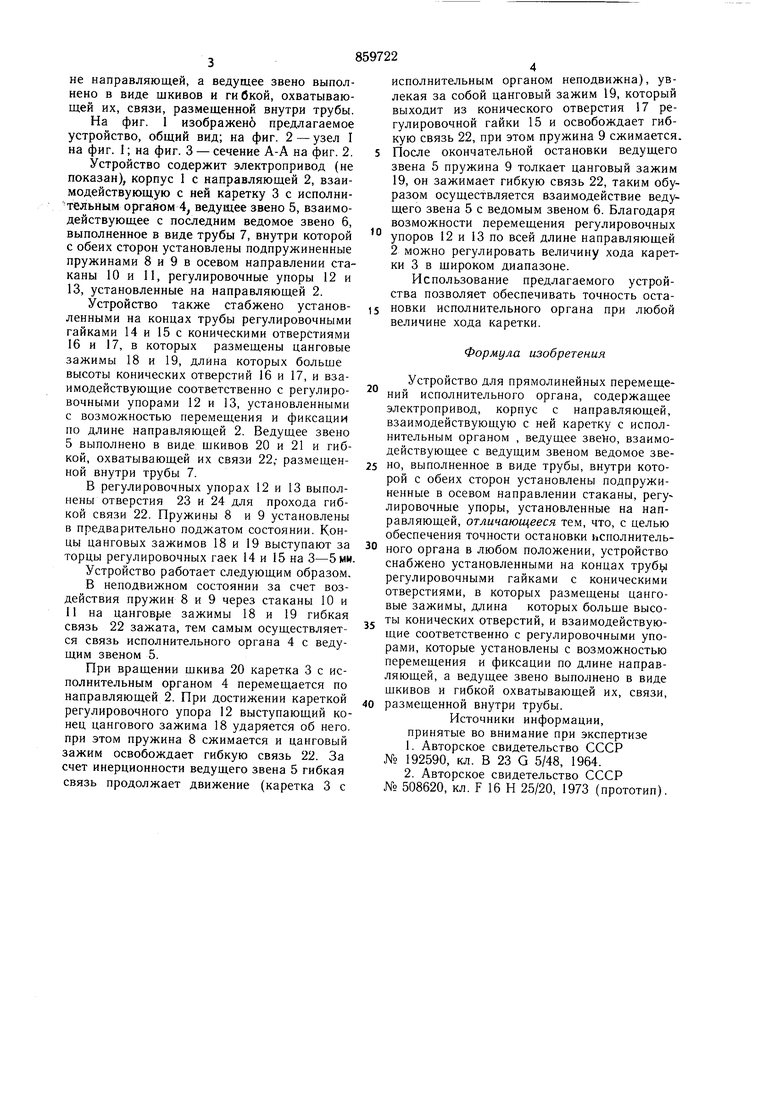
Поставленная цель достигается тем, что устройство снабжено установленными на концах трубы регулировочными гайками с коническими отверстиями, в которых размещены цанговые зажимы, длина которых больше высоты конических отверстий, и взаимодействующие соответственно с регулировочными упорами, которые установлены с возможностью перемещения и фиксации по длине направляющей, а ведущее звено выполнено в виде щкивов и ги бкой, охватывающей их, связи, размещенной внутри трубы. На фиг. 1 изображенб предлагаемое устройство, общий вид; на фиг. 2 - узел I на фиг. 1; на фиг. 3 - сечение А-А на фиг. 2. Устройство содержит электропривод (не показан), корпус 1 с направляющей 2, взаимодействующую с ней каретку 3 с исполни-тельным органом 4, ведущее звено 5, взаимодействующее с последним ведомое звено 6, выполненное в виде трубы 7, внутри которой с обеих сторон установлены подпружиненные пружинами 8 и 9 в осевом направлении стаканы 10 и 11, регулировочные упоры 12 и 13, установленные на направляющей 2. Устройство также стабжено установленными на концах трубы регулировочными гайками 14 и 15 с коническими отверстиями 16 и 17, в которых размещены цанговые зажимы 18 и 19, длина которых больше высоты конических отверстий 16 и 17, и взаимодействующие соответственно с регулировочными упорами 12 и 13, установленными с возможностью перемещения и фиксации по длине направляющей 2. Ведущее звено 5 выполнено в виде шкивов 20 и 21 и гибкой, охватывающей их связи 22,- размещенной внутри трубы 7. В регулировочных упорах 12 и 13 выполнены отверстия 23 и 24 для прохода гибкой связи 22. Пружины 8 и 9 установлены в предварительно поджатом состоянии. Концы цанговых зажимов 18 и 19 выступают за торцы регулировочных гаек 14 и 15 на 3-5мм Устройство работает следующим образом. В неподвижном состоянии за счет воздействия пружин 8 и 9 через стаканы 10 и 11 на цангов 1е зажимы 18 и 19 гибкая связь 22 зажата, тем самым осуществляется связь исполнительного органа 4 с ведущим звеном 5. При вращении шкива 20 каретка 3 с исполнительным органом 4 перемещается по направляющей 2. При достижении кареткой регулировочного упора 12 выступающий конец цангового зажима 18 ударяется об него, при этом пружина 8 сжимается и цанговый зажим освобождает гибкую связь 22. За счет инерционности ведущего звена 5 гибкая связь продолжает движение (каретка 3 с исполнительным органом неподвижна), увлекая за собой цанговый зажим 19, который выходит из конического отверстия 17 регулировочной гайки 15 и освобождает гибкую связь 22, при этом пружина 9 сжимается. После окончательной остановки ведущего звена 5 пружина 9 толкает цанговый зажим 19, он зажимает гибкую связь 22, таким обуразом осуществляется взаимодействие ведущего звена 5 с ведомым звеном 6. Благодаря возможности перемещения регулировочных упоров 12 и 13 по всей длине направляющей 2 можно регулировать величину хода каретки 3 в широком диапазоне. Использование предлагаемого устройства позволяет обеспечивать точность остановки исполнительного органа при любой величине хода каретки. Формула изобретения Устройство для прямолинейных перемещений исполнительного органа, содержащее электропривод, корпус с направляющей, взаимодействующую с ней каретку с исполнительным органом , ведущее звено, взаимодействующее с ведущим звеном ведомое звено, выполненное в виде трубы, внутри которой с обеих сторон установлены подпружиненные в осевом направлении стаканы, регу лировочные упоры, установленные на направляющей, отличающееся тем, что, с целью обеспечения точности остановки исполнительного органа в любом положении, устройство снабжено установленными на концах трубы регулировочными гайками с коническими отверстиями, в которых размещены цанговые зажимы, длина которых больше высоты конических отверстий, и взаимодействующие соответственно с регулировочными упорами, которые установлены с возможностью перемещения и фиксации по длине направляющей, а ведущее звено выполнено в виде шкивов и гибкой охватывающей их, связи, размещенной внутри трубы. Источники информации, принятые во внимание при экспертизе 1.Авторское свидетельство СССР № 192590, кл. В 23 G 5/48, 1964. 2.Авторское свидетельство СССР № 508620, кл. F 16 Н 25/20, 1973 (прототип).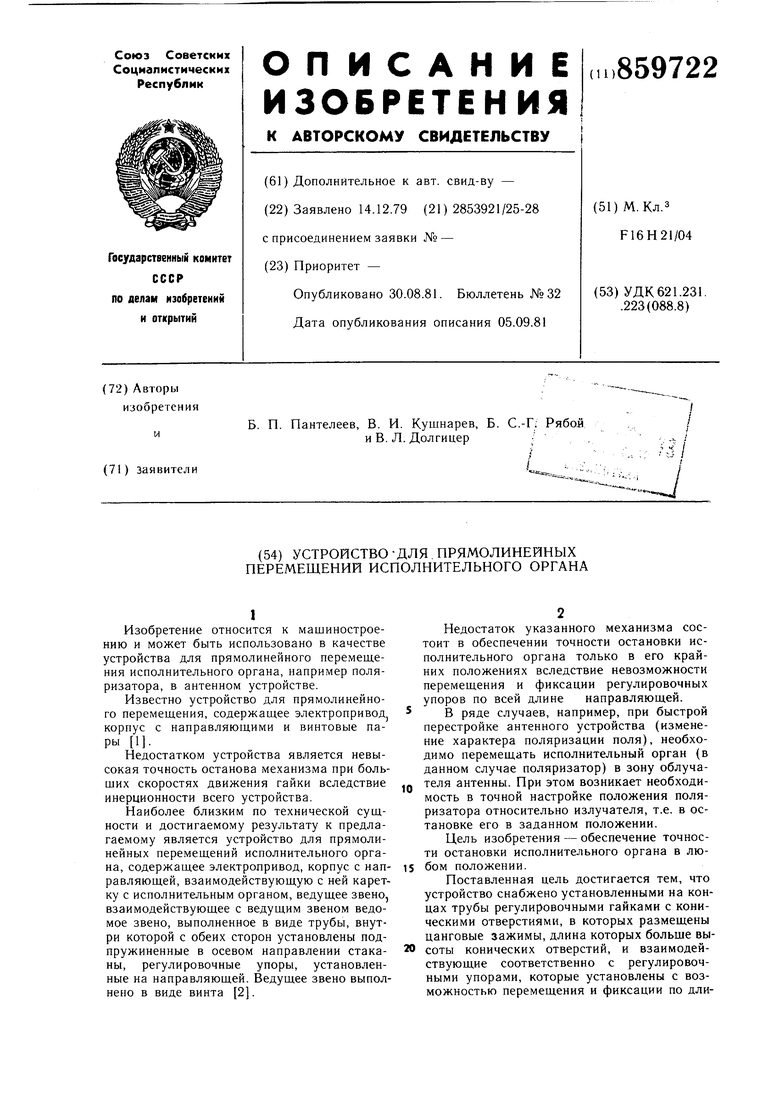
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для подгонки величиныСОпРОТиВлЕНия РЕзиСТОРОВ | 1979 |
|
SU828223A1 |
| Устройство для очистки внутренней поверхности трубопроводов | 1989 |
|
SU1726074A1 |
| Прецизионный блокиратор комбинированного действия для пространственного блокирования вала | 2018 |
|
RU2674956C1 |
| СИСТЕМА ЗАРЯЖАНИЯ АВТОМАТИЧЕСКОЙ АРТИЛЛЕРИЙСКОЙ УСТАНОВКИ | 2003 |
|
RU2231728C1 |
| ПРИВОД КОЛЕСА ВЕЛОСИПЕДА | 2015 |
|
RU2622734C2 |
| Способ видеосъемки и система для его реализации | 2019 |
|
RU2705102C1 |
| ПЕРЕДАЧА С ГИБКИМ ТЯГОВЫМ ОРГАНОМ | 2005 |
|
RU2295077C1 |
| ПРИВОД СКВАЖИННОГО ШТАНГОВОГО НАСОСА | 2014 |
|
RU2560111C1 |
| ПОДЪЕМНИК ДЛЯ ПРЯМОЛИНЕЙНЫХ ЛЕСТНИЧНЫХ МАРШЕЙ | 2012 |
|
RU2509711C2 |
| ПРИВОД СКВАЖИННОГО ШТАНГОВОГО НАСОСА | 2014 |
|
RU2560113C1 |