Изобретение относится к устройствам для очистки трубопроводов, например, в химической, легкой промышленности и других отраслях народного хозяйства, где требуется очистка труб от твердых осадкообразований и отложений солей.
Цель изобретения - повышение производительности очистки трубопроводов от плотных отложений путем исключения свободного хода очистного органа.
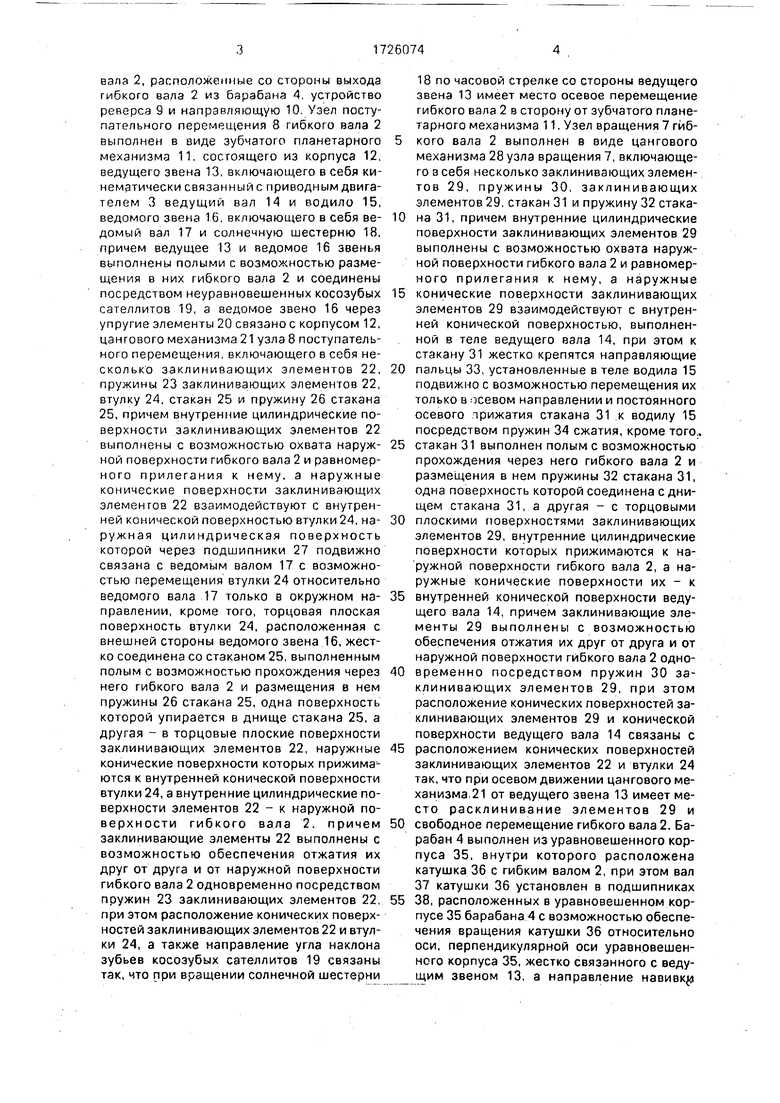
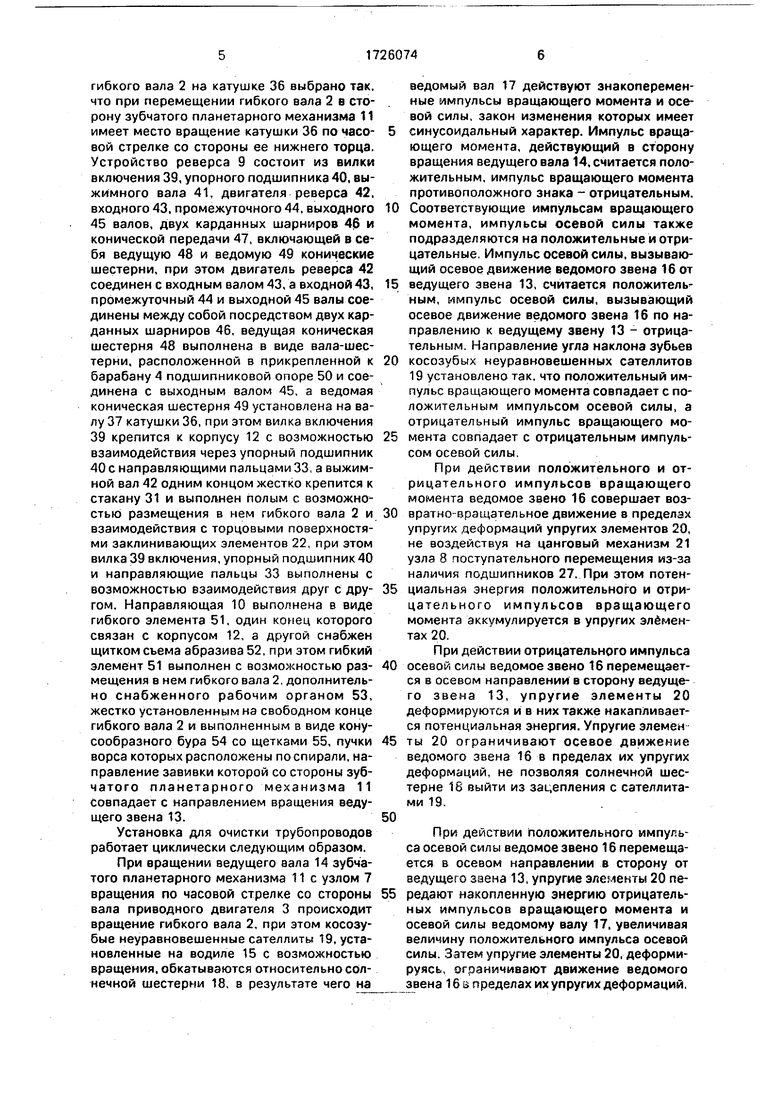
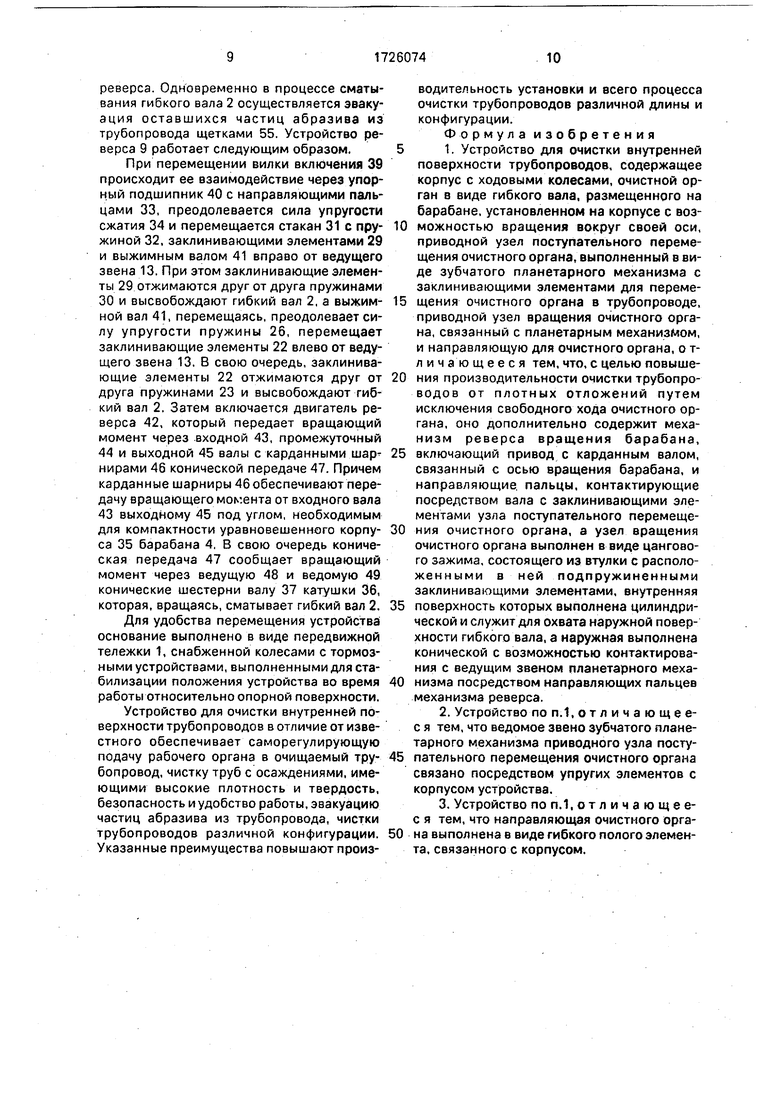
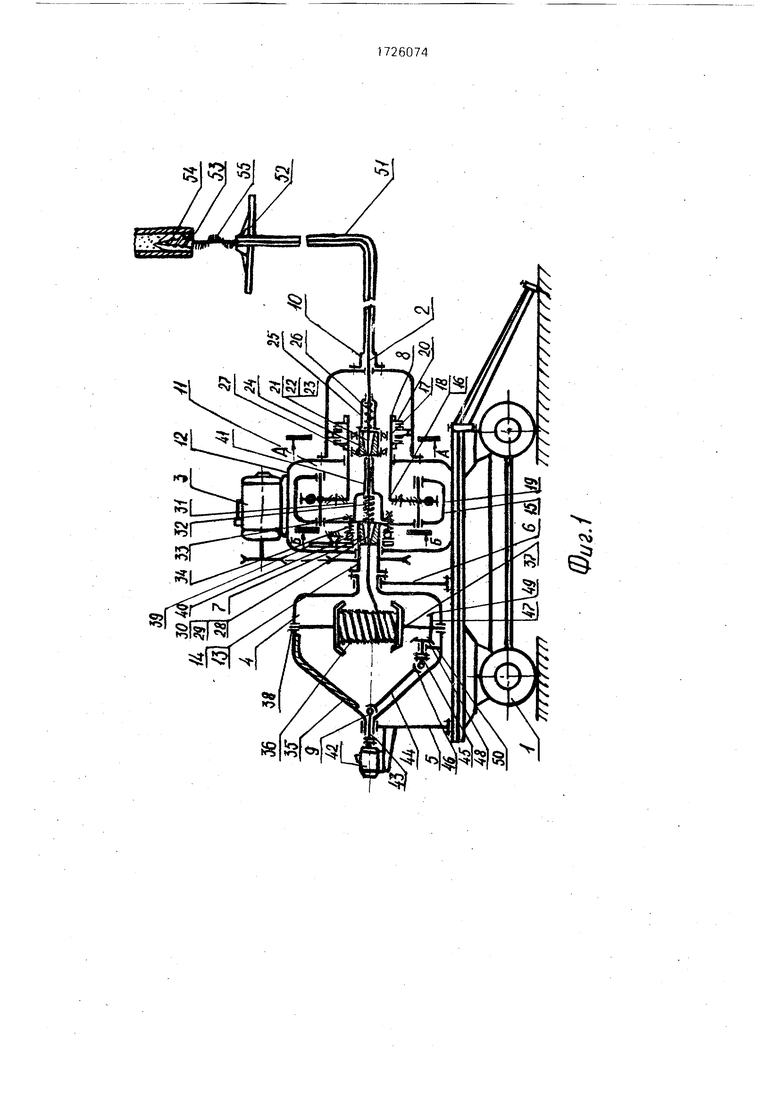
На фиг.1 изображено устройство для очистки внутренней поверхности трубопроводов, общий вид; на фиг.2 - взаимосвязь составляющих деталей цангового механизма узла поступательного перемещения; на
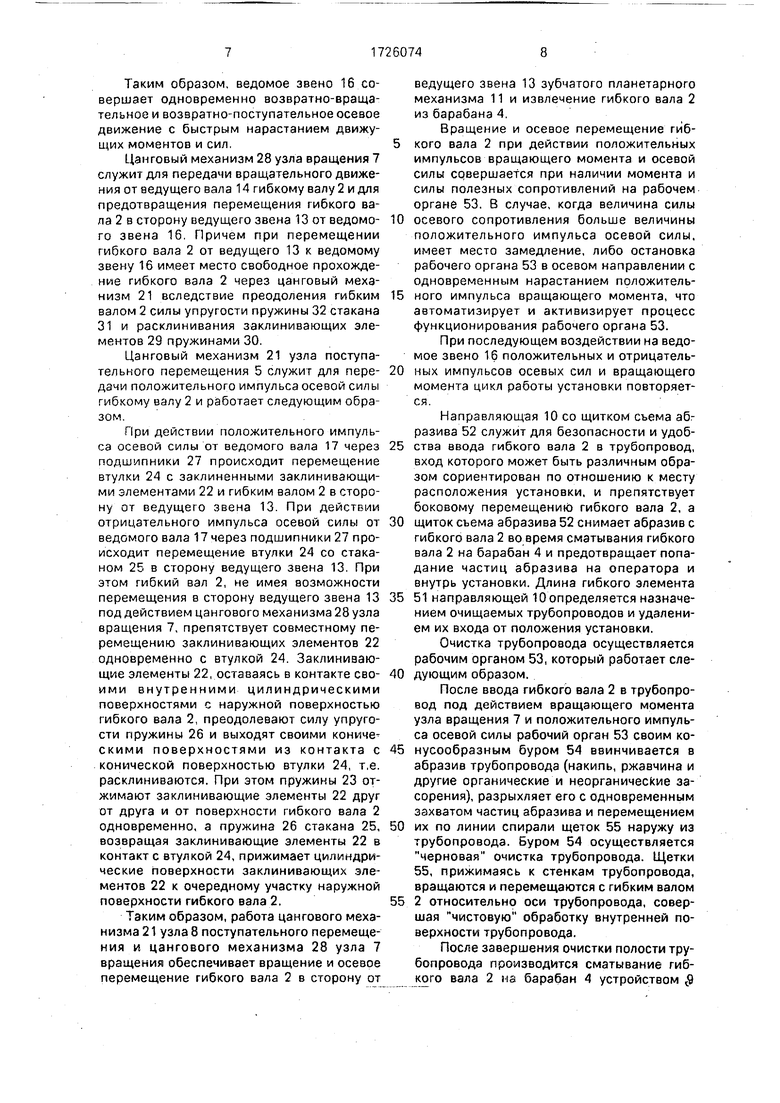
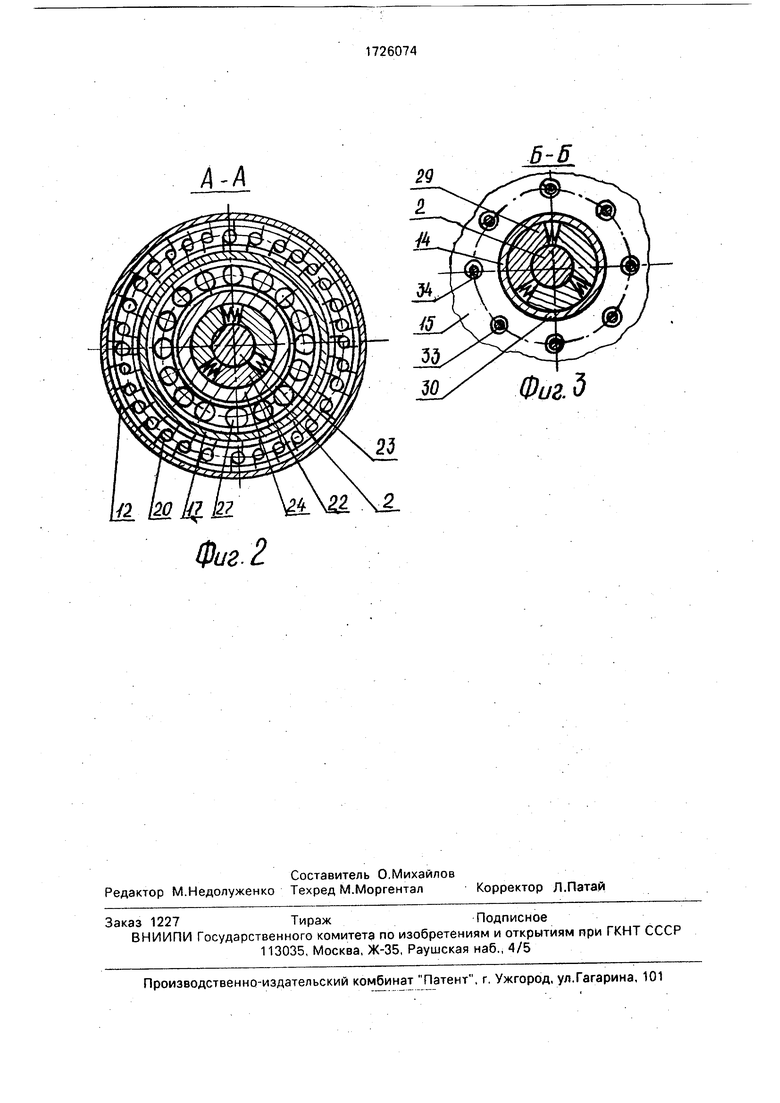
фиг.З - расположение заклинивающих элементов цангового механизма узла вращения.
Устройство для очистки содержит основание, выполненное в виде передвижной тележки 1, снабженной колесами с тормозными устройствами, очистной орган, выполненный в виде гибкого вала 2, размещенные на основании приводной двигатель 3, барабан 4, выполненный с возможностью вращения в подшипниковых опорах 5 и 6. установленных на передвижной тележке 1 с возможностью размещения в ней гибкого вала 2, узел вращения 7 гибкого вала 2 и узел 8 поступательного перемещения гибкого
VI ГО
о о VJ
вала 2, расположенные со стороны выхода гибкого вала 2 из барабана 4. устройство реверса 9 и направляющую 10. Узел поступательного перемещения 8 гибкого вала 2 выполнен в виде зубчатого планетарного механизма 11. состоящего из корпуса 1.2, ведущего звена 13, включающего в себя кинематически связанный с приводным двигателем 3 ведущий вал 14 и водило 15, ведомого звена 1.6, включающего в себя ведомый вал 17 и солнечную шестерню 18, причем ведущее 13 и ведомое 16 звенья выполнены полыми с возможностью размещения в них гибкого вала 2 и соединены посредством неуравновешенных косозубых сателлитов 19, а ведомое звено 16 через упругие элементы 20 связано с корпусом 12, цангового механизма 21 узла 8 поступательного перемещения, включающего в себя несколько заклинивающих элементов 22, пружины 23 заклинивающих элементов 22, втулку 24, стакан 25 и пружину 26 стакана 25, причем внутренние цилиндрические поверхности заклинивающих элементов 22 выполнены с возможностью охвата наружной поверхности гибкого вала 2 и равномерного прилегания к нему, а наружные конические поверхности заклинивающих элементов 22 взаимодействуют с внутренней конической поверхностью втулки 24, наружная цилиндрическая поверхность которой через подшипники 27 подвижно связана с ведомым валом 17 с возможностью перемещения втулки 24 относительно ведомого вала 17 только в окружном направлении, кроме того, торцовая плоская поверхность втулки 24, расположенная с внешней стороны ведомого звена 16, жестко соединена со стаканом 25, выполненным полым с возможностью прохождения через него гибкого вала 2 и размещения в нем пружины 26 стакана 25, одна поверхность которой упирается в днище стакана 25, а другая - в торцовые плоские поверхности заклинивающих элементов 22, наружные конические поверхности которых прижимаются к внутренней конической поверхности втулки 24, а внутренние цилиндрические поверхности элементов 22 - к наружной поверхности гибкого вала 2, причем заклинивающие элементы 22 выполнены с возможностью обеспечения ртжатия их друг от друга и от наружной поверхности гибкого вала 2 одновременно посредством пружин 23 заклинивающих элементов 22, при этом расположение конических поверхностей заклинивающих элементов 22 и втулки 24, а также направление угла наклона зубьев косозубых сателлитов 19 связаны так, что при вращении солнечной шестерни
18 по часовой стрелке со стороны ведущего звена 13 имеет место осевое перемещение гибкого вала 2 в сторону от зубчатого планетарного механизма 11. Узел вращения 7 гйбкого вала 2 выполнен в виде цангового механизма 28 узла вращения 7, включающего з себя несколько заклинивающих элемен- тов 29, пружины 30, заклинивающих элементов 29, стакан 31 и пружину 32 стака0 на 31, причем внутренние цилиндрические поверхности заклинивающих элементов 29 выполнены с возможностью охвата наружной поверхности гибкого вала 2 и равномерного прилегания к нему, а наружные
5 конические поверхности заклинивающих элементов 29 взаимодействуют с внутренней конической поверхностью, выполненной в теле ведущего вала 14, при этом к стакану 31 жестко крепятся направляющие
0 пальцы 33, установленные в теле водила 15 подвижно с возможностью перемещения их только в осевом направлении и постоянного осевого прижатия стакана 31 .к водилу 15 посредством пружин 34 сжатия, кроме того,,
5 стакан 31 выполнен полым с возможностью прохождения через него гибкого вала 2 и размещения в нем пружины 32 стакана 31, одна поверхность которой соединена с днищем стакана 31, а другая - с торцовыми
0 плоскими поверхностями заклинивающих элементов 29, внутренние цилиндрические поверхности которых прижимаются к наружной поверхности гибкого вала 2, а наружные конические поверхности их - к
5 внутренней конической поверхности ведущего вала 14, причем заклинивающие элементы 29 выполнены с возможностью обеспечения отжатия их друг от друга и от наружной поверхности гибкого вала 2 одно0 временно посредством пружин 30 заклинивающих элементов 29, при этом расположение конических поверхностей заклинивающих элементов 29 и конической поверхности ведущего вала 14 связаны с
5 расположением конических поверхностей заклинивающих элементов 22 и втулки 24 так, что при осевом движении цангового механизма 21 от ведущего звена 13 имеет место расклинивание элементов 29 и
0 свободное перемещение гибкого вала 2. Барабан 4 выполнен из уравновешенного корпуса 35, внутри которого расположена катушка 36 с гибким валом 2, при этом вал 37 катушки 36 установлен в подшипниках
5 38, расположенных в уравновешенном корпусе 35 барабана 4 с возможностью обеспечения вращения катушки 36 относительно оси, перпендикулярной оси уравновешенного корпуса 35, жестко связанного с ведущим звеном 13, а направление навивку
гибкого вала 2 на катушке 36 выбрано так. что при перемещении гибкого вала 2 в сторону зубчатого планетарного механизма 11 имеет место вращение катушки 36 по часо- вой стрелке со стороны ее нижнего торца. Устройство реверса 9 состоит из вилки включения 39, упорного подшипника 40, выжимного вала 41, двигателя реверса 42, входного 43, промежуточного 44, выходного 45 валов, двух карданных шарниров 46 и конической передачи 47, включающей в себя ведущую 48 и ведомую 49 конические шестерни, при этом двигатель реверса 42 соединен с входным валом 43, а входной 43, промежуточный 44 и выходной 45 валы соединены между собой посредством двух карданных шарниров 46, ведущая коническая шестерня 48 выполнена в виде вала-шестерни, расположенной в прикрепленной к барабану 4 подшипниковой опоре 50 и соединена с выходным валом 45, а ведомая коническая шестерня 49 установлена на валу 37 катушки 36, при этом вилка включения
39крепится к корпусу 12 с возможностью взаимодействия через упорный подшипник
40с направляющими пальцами 33, а выжимной вал 42 одним концом жестко крепится к стакану 31 и выполнен полым с возможностью размещения в нем гибкого вала 2 и взаимодействия с торцовыми поверхностями заклинивающих элементов 22, при этом вилка 39 включения, упорный подшипник 40
и направляющие пальцы 33 выполнены с возможностью взаимодействия друг с дру- гом. Направляющая 10 выполнена в виде гибкого элемента 51, один конец которого связан с корпусом 12, а другой снабжен щитком съема абразива 52, при этом гибкий элемент 51 выполнен с возможностью раз- мещения в нем гибкого вала 2, дополнительно снабженного рабочим органом 53, жестко установленным на свободном конце гибкого вала 2 и выполненным в виде конусообразного бура 54 со щетками 55, пучки ворса которых расположены по спирали, направление завивки которой со стороны зубчатого планетарного механизма 11 Совпадает с направлением вращения ведущего звена 13.
Установка для очистки трубопроводов работает циклически следующим образом.
При вращении ведущего вала 14 зубчатого планетарного механизма 11с узлом 7 вращения по часовой стрелке со стороны вала приводного двигателя 3 происходит вращение гибкого вала 2, при этом косозу- бые неуравновешенные сателлиты 19, установленные на водиле 15 с возможностью вращения, обкатываются относительно солнечной шестерни 18, в результате чего на
ведомый вал 17 действуют знакопеременные импульсы вращающего момента и осевой силы, закон изменения которых имеет синусоидальный характер. Импульс вращающего момента, действующий в сторону вращения ведущего вала 14, считается положительным, импульс вращающего момента противоположного знака - отрицательным. Соответствующие импульсам вращающего момента, импульсы осевой силы также подразделяются на положительные и отрицательные. Импульс осевой силы, вызывающий осевое движение ведомого звена 16 от ведущего эвена 13, считается положительным, импульс осевой силы, вызывающий осевое движение ведомого звена 16 по направлению к ведущему звену 13 - отрицательным. Направление угла наклона зубьев косозубых неуравновешенных сателлитов 19 установлено так, что положительный импульс вращающего момента совпадает с положительным импульсом осевой силы, а отрицательный импульс вращающего момента совпадает с отрицательным импульсом осевой силы.
При действии положительного и отрицательного импульсов вращающего момента ведомое звено 16 совершает возвратно-вращательное движение в пределах упругих деформаций упругих элементов 20, не воздействуя на цанговый механизм 21 узла 8 поступательного перемещения из-за наличия подшипников 27. При этом потенциальная энергия положительного и отрицательного импульсов вращающего момента аккумулируется в упругих элементах 20.
При действии отрицательного импульса осевой силы ведомое звено 16 перемещается в осевом направлении в сторону ведущего звена 13, упругие элементы 20 деформируются и в них также накапливается потенциальная энергия. Упругие элемён ты 20 ограничивают осевое движение ведомого звена 16 в пределах их упругих деформаций, не позволяя солнечной шестерне 18 выйти из зацепления с сателлитами 19.
При действии положительного импульса осевой силы ведомое звено 16 перемещается в осевом направлении в сторону от ведущего звена 13, упругие элементы 20 передают накопленную энергию отрицательных импульсов вращающего момента и осевой силы ведомому валу 17, увеличивая величину положительного импульса осевой силы. Затем упругие элементы 20, деформируясь, ограничивают движение ведомого звена 16 з пределах их упругих деформаций.
Таким образом, ведомое звено 16 совершает одновременно возвратно-вращательное и возвратно-поступательное осевое движение с быстрым нарастанием движущих моментов и сил.
Цанговый механизм 28 узла вращения 7 служит для передачи вращательного движения от ведущего вала 14 гибкому валу 2 и для предотвращения перемещения гибкого вала 2 в сторону ведущего звена 13 от ведомого звена 16. Причем при перемещении гибкого вала 2 от ведущего 13 к ведомому звену 16 имеет место свободное прохождение гибкого вала 2 через цанговый механизм 21 вследствие преодоления гибким валом 2 силы упругости пружины 32 стакана 31 и расклинивания заклинивающих элементов 29 пружинами 30.
Цанговый механизм 21 узла поступательного перемещения 5 служит для передачи положительного импульса осевой силы гибкому валу 2 и работает следующим образом.
При действии положительного импульса осевой силы от ведомого вала 17 через подшипники 27 происходит перемещение втулки 24 с заклиненными заклинивающими элементами 22 и гибким валом 2 в сторону от ведущего звена 13. При действии отрицательного импульса осевой силы от ведомого вала 17 через подшипники 27 происходит перемещение втулки 24 со стаканом 25 в сторону ведущего звена 13. При этом гибкий вал 2, не имея возможности перемещения в сторону ведущего звена 13 под действием цангового механизма 28 узла вращения 7, препятствует совместному перемещению заклинивающих элементов 22 одновременно с втулкой 24. Заклинивающие элементы 22, оставаясь в контакте своими внутренними цилиндрическими поверхностями с наружной поверхностью гибкого вала 2, преодолевают силу упругости пружины 26 и выходят своими кониче скими поверхностями из контакта с конической поверхностью втулки 24, т.е. расклиниваются. При этом пружины 23 отжимают заклинивающие элементы 22 друг от друга и от поверхности гибкого вала 2 одновременно, а пружина 26 стакана 25, возвращая заклинивающие элементы 22 в контакт с втулкой 24, прижимает цилиндрические поверхности заклинивающих элементов 22 к очередному участку наружной поверхности гибкого вала 2.
Таким образом, работа цангового механизма 21 узла 8 поступательного перемещения и цангового механизма 28 узла 7 вращения обеспечивает вращение и осевое перемещение гибкого вала 2 в сторону от
ведущего звена 13 зубчатого планетарного механизма 11 и извлечение гибкого вала 2 из барабана 4.
Вращение и осевое перемещение гибкого вала 2 при действии положительных импульсов вращающего момента и осевой силы совершается при наличии момента и силы полезных сопротивлений на рабочем органе 53. В случае, когда величина силы
0 осевого сопротивления больше величины положительного импульса осевой силы, имеет место замедление, либо остановка рабочего органа 53 в осевом направлении с одновременным нарастанием прложитель5 ного импульса вращающего момента, что автоматизирует и активизирует процесс функционирования рабочего органа 53.
При последующем воздействии на ведомое звено 16 положительных и отрицатель0 ных импульсов осевых сил и вращающего момента цикл работы установки повторяется.
Направляющая 10 со щитком съема абг разива 52 служит для безопасности и удоб5 ства ввода гибкого вала 2 в трубопровод, вход которого может быть различным образом сориентирован по отношению к месту расположения установки, и препятствует боковому перемещению гибкого вала 2, а
0 щиток съема абразива 52 снимает абразив с гибкого вала 2 вовремя сматывания гибкого вала 2 на барабан 4 и предотвращает попадание частиц абразива на оператора и внутрь установки. Длина гибкого элемента
5 51 направляющей 10 определяется назначением очищаемых трубопроводов и удалением их входа от положения установки.
Очистка трубопровода осуществляется рабочим органом 53, который работает сле0 дующим образом.
После ввода гибкого вала 2 в трубопровод под действием вращающего момента узла вращения 7 и положительного импульса осевой силы рабочий орган 53 своим ко5 нусообразным буром 54 ввинчивается в абразив трубопровода (накипь, ржавчина и другие органические и неорганические засорения), разрыхляет его с одновременным захватом частиц абразива и перемещением
0 их по линии спирали щеток 55 наружу из трубопровода. Буром 54 осуществляется черновая очистка трубопровода. Щетки 55, прижимаясь к стенкам трубопровода, вращаются и перемещаются с гибким валом
5 2 относительно оси трубопровода, совершая чистовую обработку внутренней поверхности трубопровода.
После завершения очистки полости трубопровода производится сматывание гибкого вала 2 на барабан 4 устройством ,9
реверса. Одновременно в процессе сматывания гибкого вала 2 осуществляется эвакуация оставшихся частиц абразива из трубопровода щетками 55. Устройство реверса 9 работает следующим образом.
При перемещении вилки включения 39 происходит ее взаимодействие через упорный подшипник 40 с направляющими пальцами 33, преодолевается сила упругости сжатия 34 и перемещается стакан 31 с пру- жиной 32, заклинивающими элементами 29 и выжимным валом 41 вправо от ведущего звена 13. При этом заклинивающие элементы 29 отжимаются друг от друга пружинами 30 и высвобождают гибкий вал 2, а выжим- ной вал 41, перемещаясь, преодолевает силу упругости пружины 26, перемещает заклинивающие элементы 22 влево от ведущего звена 13. В свою очередь, заклинивающие элементы 22 отжимаются друг от друга пружинами 23 и высвобождают гибкий вал 2. Затем включается двигатель реверса 42, который передает вращающий момент через входной 43, промежуточный 44 и выходной 45 валы с карданными шар- нирами 46 конической передаче 47. Причем карданные шарниры 46обеспечивают передачу вращающего момента от входного вала 43 выходному 45 под углом, необходимым для компактности уравновешенного корпу- са 35 барабана 4. В свою очередь коническая передача 47 сообщает вращающий момент через ведущую 48 и ведомую 49 конические шестерни валу 37 катушки 36, которая, вращаясь, сматывает гибкий вал 2.
Для удобства перемещения устройства основание выполнено в виде передвижной тележки 1, снабженной колесами с тормозными устройствами, выполненными для стабилизации положения устройства во время работы относительно опорной поверхности.
Устройство для очистки внутренней поверхности трубопроводов в отличие от известного обеспечивает саморегулирующую подачу рабочего органа в очищаемый тру- бопровод, чистку труб с осаждениями, имеющими высокие плотность и твердость, безопасность и удобство работы, эвакуацию частиц абразива из трубопровода, чистки трубопроводов различной конфигурации. Указанные преимущества повышают производительность установки и всего процесса очистки трубопроводов различной длины и конфигурации.
Формула изобретения 1. Устройство для очистки внутренней поверхности трубопроводов, содержащее корпус с ходовыми колесами, очистной орган в виде гибкого вала, размещенного на барабане, установленном на корпусе с возможностью вращения вокруг своей оси, приводной узел поступательного перемещения очистного органа, выполненный в виде зубчатого планетарного механизма с заклинивающими элементами для перемещения очистного органа в трубопроводе, приводной узел вращения очистного органа, связанный с планетарным механизмом, и направляющую для очистного органа, о т- личающееся тем, что, с целью повышения производительности очистки трубопро- водов от плотных отложений путем исключения свободного хода очистного органа, оно дополнительно содержит механизм реверса вращения барабана, включающий привод с карданным валом, связанный с осью вращения барабана, и направляющие, пальцы, контактирующие посредством вала с заклинивающими элементами узла поступательного перемещения очистного органа, а узел вращения очистного органа выполнен в виде цангового зажима, состоящего из втулки с располо- женными в ней подпружиненными заклинивающими элементами, внутренняя поверхность которых выполнена цилиндрической и служит для охвата наружной поверхности гибкого вала, а наружная выполнена конической с возможностью контактирования с ведущим звеном планетарного механизма посредством направляющих пальцев механизма реверса.
2.Устройство по п.1, от л и ч а ю ще е- с я тем, что ведомое звено зубчатого планетарного механизма приводного узла поступательного перемещения очистного органа связано посредством упругих элементов с корпусом устройства.
3.Устройство по п.1, о т л и ч а ю щ е е- с я тем, что направляющая очистного органа выполнена в виде гибкого полого элемента, связанного с корпусом.
Фиг 2
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для очистки внутренней поверхности трубопроводов | 1989 |
|
SU1664425A1 |
| ДВУХСКОРОСТНОЙ РУЧНОЙ ПРИВОД ЗАПОРНОЙ АРМАТУРЫ | 2018 |
|
RU2701982C1 |
| Устройство для очистки поверхности | 1989 |
|
SU1662712A1 |
| Устройство для подгонки величиныСОпРОТиВлЕНия РЕзиСТОРОВ | 1979 |
|
SU828223A1 |
| Устройство для прямолинейных перемещений исполнительного органа | 1979 |
|
SU859722A1 |
| Питатель для порошковых материалов | 1981 |
|
SU979243A2 |
| Станок для фрикционно-механического нанесения покрытия на внутреннюю поверхность | 1987 |
|
SU1482979A1 |
| МАШИНА ДЛЯ ОЧИСТКИ ВНУТРЕННЕЙ ПОВЕРХНОСТИ ГАЗОХОДОВ | 2015 |
|
RU2616746C2 |
| КОМБАЙН КУЗНЕЦОВА ДЛЯ СНЯТИЯ НАРУЖНОГО ГИДРОИЗОЛЯЦИОННОГО ПОКРЫТИЯ С МАГИСТРАЛЬНЫХ ТРУБОПРОВОДОВ И ЕГО ОБРАБАТЫВАЮЩИЕ АГРЕГАТЫ ПОЭТАПНОЙ ОЧИСТКИ ТРУБОПРОВОДА | 1995 |
|
RU2098204C1 |
| Инерционный трансформатор | 1991 |
|
SU1825927A1 |
Изобретение относится к устройствам для очистки трубопроводов, например, в хи- мической.легкой и других отраслях промыш- ленности, где требуется очистка труб от твердых осадкообразований и отложений солей, и может быть применено с целью повышения производительности очистки трубопроводов от плотных отложений путем исключения свободного хода очистного органа. Устройство содержит основание, выполненное в виде передвижной тележки, очистной орган в виде гибкого вала, размещенные на основании приводной двигатель, барабан с гибким валом, узел вращения, выполненный в виде цангового механизма, узел поступательного перемещения, выполненный в виде зубчатого планетарного механизма с цанговым механизмом с возможностью осевого перемещения гибкого вала вдоль своей оси. Устройство снабжено направляющей, которая выполнена в виде гибкого элемента, в полости которого размещен гибкий вал и снабжен щитком съема абразива. На гибком валу укреплен рабочий орган, состоящий из конусообразного бура и щеток, пучки ворса которых размещены по спирали. Сматывание гибкого вала осуществляется устройством реверса. 2 з.п.ф-лы, 3 ил.
| Устройство для очистки внутренней поверхности трубопроводов | 1989 |
|
SU1664425A1 |
| Топка с несколькими решетками для твердого топлива | 1918 |
|
SU8A1 |
