Предметом изобретения является способ автоматического регулирования различных процессов в зависимости от скорости изменения регул и р у е - I о 1 величины.
Классический нринцин прямого регулиров ания Пoлзyнoвa-J атта и его видоизменение, а также регулирование но производной от регулируемого параметра или по величиие внешнего воздействующего фактора, могут быть иснользованы (з обитем случае) лишь в сочетании с основным нрннциг1ол Ползунова-Уатта. Это определяет неизбежность жесткой или 1-ибкоГг обратной связи органов уиравления с органом реагирования (измерительным оргаиом) при непрямом регулировании в случае, когда отсутствует решаюн 1ин эффект саморегулиреваиия. Вместе с тем ко.нлексное решение нринципов Ползуиова-JaTTa и Си1меиса известно в частном региснии инерционных регуляторов скорости.
Отличительная особенность предлагаемого способа заключается в том, что, для обеспечения минимального дииа ического отклонения регу.тируемого параметра от заданного значения, при нарушениг. устано БИвн1егося ре.жнма и максимальной скорости завер1пения перс.хсаных проиессов, измерительному элементу или ведомой им контактной каретке, способной оставаться в любом по.южеинн и создающей за время контакта с измерительным элементом регулирующие импульсы, действующие иа исполнительный орган, сообщают определенное колебательиое движение. Время контакта оргаиа реагирования с кареткой, оироделяюшее длительность регулирующего и.миульса, зависит от скорости из .менеиия регулируемой величины в пределах каждого периода колебания. Изменением графика колебательного движения может быть достигнута различная зависимость времени регулируюншго импульса от скорости изменения регулируе.мой величины.
N° 86099
1аким образом, представляется возможным осуществить непрямое регулирование без обратного выключения (обратной связи) с переменной интенсивностью регулнрования и опти-мальной зависимости регулнруюи их импу.1ьсов от скорости изменения регулируемой величины.
Новый споссб автоматического регулирования сбеснечивает мини мальные динамические отклонения регулируемого параметра от заданного значения при нарун1е1Н1и уста1новившегося режима и максимальиую скорость завершения 11ере.0;Дных нроцессов.
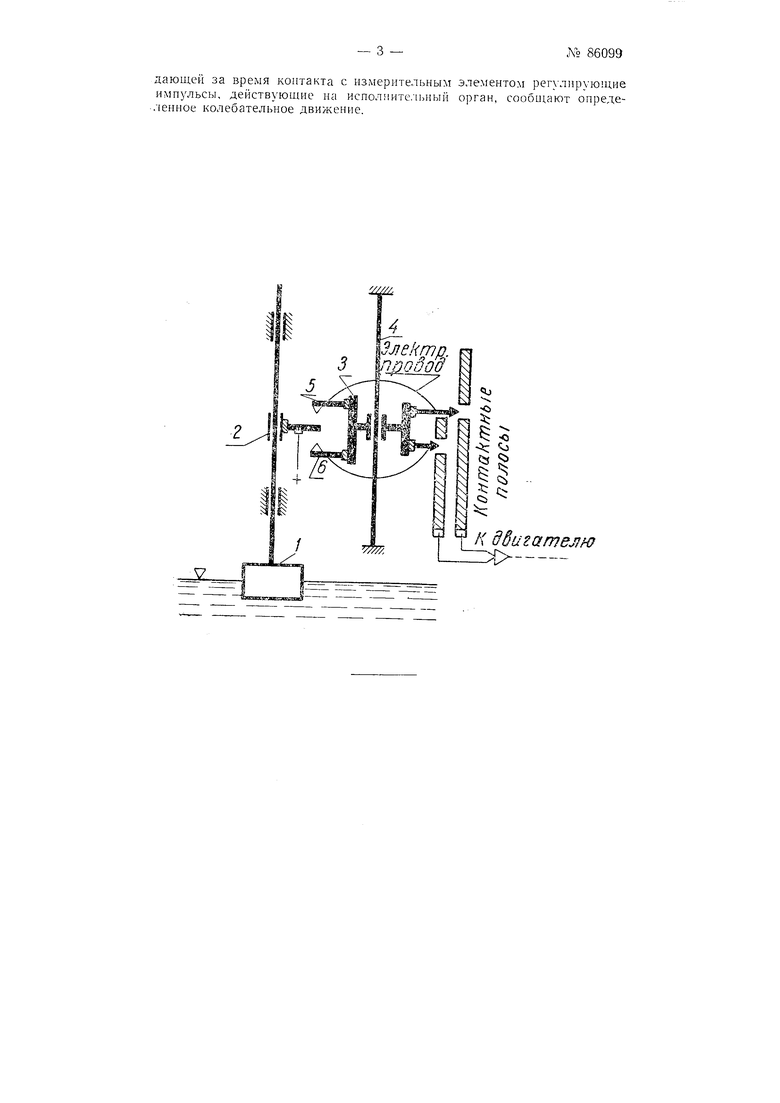
На чертеже изображена схема применения способа к регулированию уровня верхнего бьефа гн|др.останции.
/ повторяет движение уровня (регулируемого нара метра) и является измерительным органом. Ползуну J, способному скользить но вертика.тьному нпоку ноплавка, задается некоторое периодическое колебание относительно нулевого положения на штоке; образом абсолютное движение ползуна 2 определяется сложением переносиого движения (сог местно с поплавком) и относительного колебательного движения.
Каретка ,i. способная скользнть по вертикальной напра1вляюн1ей 4, следует за движением ползуна 2 при соприкосновении с ним одного из стержней 5 или 6 каретки. При движении каретки ,i с ползуно.1 2 замыкается электрическая цепь регулнруюшвго импульса.
Переменная HHTCHCHBHOCTII регулирования, вследствие зависимости регулируюп их импульсов от скорости изменения регулируемого параметра, позволяет значительио уменьшить степень неравномерностн регулирования. Однако, во всех с.т чаях величина неравномерности остяется конечной и положительной. А статическая характеристика регулирования может быть доетигнута специальным устройством, возвращающим каретку в исходное положение. Он:а может быть доСтигиута также заданием начального регулируюи его имиульса, при отсутствии изменения peiy.HipyeMoro параметра ирн УСЛОВИИ, что р асстояине между стержнями 5 и о каретки меиьп1е удвоенной амплитуды колебательного движеHKii |олзуна.
Периодическое движение может быть задано не юлзуну 2. а каретке 3, .механическим приводом (через дифференциал или фрикционное сцепление) нли электромагнитным нолем, при условии, что каретка, участвуя в колебательном движении, будет следовать за движением измерителя в момент контакта с ним.
Наконец, периодическое колебательное дв 1женне может быть задано неиосредственио регулируемому параметру на участке действия его на измерительный орган.
Конструктивное решение изложенного метода регулирования может быть осуш.ест1влеио различно в зависимости от конкретных условий автоматизируемого объекта.
Предмет изобретения
Способ автОматическо;го регулирования различных процессов в зависимости от скорости изменения регулируемой величины при помощи
измерительного элемента, контролирующего регулируемую величину, отличающийся тем, что, для обеспечения минимального динамического отклонения регулируемого параметра от заданного значения, при нарущеиии уетановившегося режима и максимальной скорости за верщеиия ерехо-дных ироцессов измерительному элементу или ведомой
им контактной каретке, способной оставаться в любом положении и создающей за время контакта с измерительным импульсы, дейетвующие на исполните.чьный .тенное колебательное движение. - 3 - Л 86099 элементом регулирующие орган, сообии1Ют опреде

| название | год | авторы | номер документа |
|---|---|---|---|
| Способ регулирования частоты и активной мощности электростанций и устройство для осуществления этого способа | 1954 |
|
SU105238A1 |
| Устройство для группового регулирования возбуждения генераторов | 1958 |
|
SU120569A1 |
| Устройство группового регулирования режима работы агрегатов электростанции по частоте и мощности | 1972 |
|
SU542320A1 |
| АВТОМАТИЧЕСКОЕ РЕГУЛИРУЮЩЕЕ УСТРОЙСТВО | 1934 |
|
SU45663A1 |
| Устройство для регулирования температуры | 1980 |
|
SU877491A1 |
| АВТОМАТИЧЕСКАЯ САМОНАСТРАИВАЮЩАЯСЯ МИКРОПРОЦЕССОРНАЯ СИСТЕМА РЕГУЛИРОВАНИЯ ЧАСТОТЫ ВРАЩЕНИЯ ВАЛА ТЕПЛОВОЙ МАШИНЫ | 2012 |
|
RU2502884C1 |
| АВТОМАТИЧЕСКИЙ КОМБИНИРОВАННЫЙ МИКРОПРОЦЕССОРНЫЙ РЕГУЛЯТОР ТЕМПЕРАТУРЫ ЭНЕРГЕТИЧЕСКОЙ УСТАНОВКИ ТРАНСПОРТНОГО СРЕДСТВА | 2010 |
|
RU2426895C1 |
| Рецепторный датчик положения обучаемой системы управления | 1985 |
|
SU1352456A1 |
| АВТОМАТИЧЕСКАЯ САМОНАСТРАИВАЮЩАЯСЯ МИКРОПРОЦЕССОРНАЯ СИСТЕМА РЕГУЛИРОВАНИЯ ЧАСТОТЫ ВРАЩЕНИЯ ВАЛА ТЕПЛОВОЙ МАШИНЫ | 2012 |
|
RU2504678C1 |
| Способ регулирования контактного зазора переключающей контактной группы | 1976 |
|
SU708430A1 |