Изобретение относится к области двигателестроения, в частности к автоматическим системам регулирования частоты (скорости) вращения валов энергетических установок (тепловых машин) с двигателями внутреннего сгорания.
Известен регулятор скорости вращения вала двигателя внутреннего сгорания транспортного средства [1], снабженный измерителем скорости с грузами, пружиной, кинематической связью между грузами и пружиной, а также устройством задания скоростного режима. В кинематическую связь между грузами и пружиной введено звено с переменным передаточным отношением, управляемым устройством задания скорости. Недостатком этого регулятора скорости является снижение коэффициента усиления измерителя с уменьшением заданной скорости. Такое утверждение ошибочно, так как статические и динамические характеристики и параметры элементов регулятора должны выбираться с учетом статических и динамических характеристик и параметров объекта регулирования скорости (частоты) ωв вращения вала, то есть с учетом статических и динамических характеристик и параметров двигателя внутреннего сгорания и агрегата его нагрузки. В описании не показано влияние известного регулятора скорости типа Д50 и предложенного регулятора на устойчивость и показатели качества работы автоматической системы регулирования частоты вращения вала тепловой машины. Отмечается однако, что коэффициент усиления измерителя в предложенном регуляторе скорости остается постоянным и заданным при всех заданных скоростях (у известного регулятора скорости типа Д50 он изменяется в 1,8 раза). В действительности постоянство коэффициента усиления измерителя в предложенном регуляторе скорости приведет к уменьшению запасов устойчивости, то есть к ухудшению показателей качества работы, автоматической системы регулирования частоты вращения вала тепловой машины.
Известны электронные регуляторы частоты вращения для управления подачей топлива насоса высокого давления [2-7], в которых приведены варианты конструкции исполнительного механизма.
Наиболее близким техническим решением является электронно-механический регулятор частоты вращения вала дизеля [8]. Регулятор оснащен пропорциональным электромагнитом, установленным с возможностью взаимодействия с одной из реек топливного насоса, датчиком положения рейки, жестко установленным в корпусе, механическим датчиком частоты вращения коленчатого вала дизеля центробежного типа и электронным блоком управления.
Он содержит две основные функциональные части: объект регулирования (ОР) и автоматический регулятор (АР). Любой АР содержит две основные соединенные последовательно функциональные части: управляющий орган (УО) и исполнительно-регулирующее устройство (ИРУ). В свою очередь ИРУ содержит две основные соединенные последовательно функциональные части: исполнительный механизм (ИМ) и регулирующий орган (РО) [10]. Объектом регулирования ОР частоты ωв вращения вала (регулируемой величины φ) является тепловая машина и агрегат ее нагрузки [11]. Зависимости ωв(gц) или hp(gц) при N=const (называемые регулировочными характеристиками) определяют изменение частоты ωв вращения вала (регулируемой величины) в зависимости от цикловой подачи топлива gц или положения hp органа управления подачей топлива при неизменной мощности N тепловой машины. Эти зависимости описывают статические характеристики тепловой машины и его агрегата нагрузки как объекта регулирования частоты ωв вращения вала (регулируемой величины φ) по регулирующему воздействию µ - цикловой подаче топлива gц или положению hp органа управления подачей топлива при N=const [12].
В автоматических регуляторах частоты вращения вала непрямого действия, содержащих в качестве РО аппаратуру подачи топлива (регулирующего воздействия µ) в тепловую машину, функции ИМ выполняет пневматический, гидравлический или электромагнитный привод реек топливных насосов высокого давления или иглы форсунки [10, 11].
Автоматические системы регулирования частоты вращения вала тепловой машины, содержащие известные регуляторы частоты вращения [обычно регуляторы с пропорционально-интегральным (ПИ) алгоритмом работы], не всегда работают устойчиво и качественно.
Для изменения качества работы таких систем при их настройке изменяют его динамический параметр настройки - значение постоянной времени интегрирования Ти, для чего применяются изодромные иглы (игольчатые клапаны). Однако, такая настройка может быть оптимальной только для одного режима работы системы регулирования. Это обусловлено тем, что статические параметры - коэффициенты передачи по регулирующему воздействию (подаче топлива в двигатель gц или по перемещению элемента органа топливоподачи hp) kµ=(∂ωв/∂gц) или 
Часто считают, что тепловая машина и агрегат ее нагрузки обладают динамическими свойствами типового инерционного апериодического звена первого порядка [13]. Зависимости gц(hp) для топливных насосов высокого давления имеют линейный характер [12, 14].
Недостатками таких систем является то, что статические и динамические параметры объекта регулирования частоты вращения ωв вала тепловой машины, обладающего динамическими свойствами апериодического звена, изменяются в широком диапазоне при изменении частоты вращения ωв (регулируемой величины φ) и мощности N (внешнего возмущающего воздействия λ).
Целью изобретения является обеспечение оптимальных настроек автоматической системы регулирования частоты вращения вала при всех режимах работы тепловой машины, которые необходимо вместе с изменением статических и динамических параметров объекта регулирования автоматически изменять статические и динамические параметры настройки регулятора частоты вращения, то есть обеспечивать самонастройку системы регулирования.
Эта цель достигается в автоматической самонастраивающейся микропроцессорной системе регулирования частоты вращения вала тепловой машины, содержащая тепловую машину (объект регулирования) с агрегатом нагрузки, топливную аппаратуру с приводом (исполнительным механизмом) регулирующего элемента органа топливоподачи (регулирующего органа), датчик частоты вращения вала и датчик положения регулирующего элемента органа топливоподачи, блок управления тепловой машиной (задающее устройство первое). Она отличается тем, что одержит задающее устройство второе, сравнивающее устройство второе, устройства коррекции первое, выполняющее коррекцию коэффициента передачи регулятора в зависимости от текущего значения мощности и от разности заданного и текущего значений мощности тепловой машины, второе, выполняющее коррекцию коэффициента передачи регулятора в зависимости от текущего значения мощности тепловой машины, третье, выполняющее операцию интегрирования по времени выходного сигнала (отклонения измеренного значения частоты вращения вала от заданного) сравнивающего устройства первого, и четвертое, изменяющее время изодрома регулятора в зависимости от мощности тепловой машины, устройства умножения первое и второе, устройство деления, устройство суммирования, выполняющее операцию сложения выходных сигналов устройства коррекции первого и устройства деления, устройство изменения мощности агрегата нагрузки, при этом сравнивающие устройства первое и второе, задающее устройство второе, устройства умножения первое, выполняющее операции перемножения выходных сигналов датчика частоты вращения вала и датчика положения регулирующего элемента органа топливоподачи, и второе, выполняющее операции умножения выходных сигналов устройств коррекции второго и третьего, устройства коррекции первое, второе, третье и четвертое, устройство деления, выполняющего операции деления произведения выходных сигналов устройств коррекции второго и третьего на выходной сигнал устройства коррекции четвертого, и устройство суммирования входят в состав микропроцессорного контроллера, содержащего программу с математической моделью пропорционально-интегрального регулятора частоты вращения вала, в соответствии с которой автоматически изменяется коэффициент передачи регулятора таким образом, чтобы коэффициент передачи системы регулирования оставался постоянным во всех диапазонах изменения мощности, и автоматически изменялось время изодрома регулятора в зависимости от мощности тепловой машины, датчик частоты вращения вала тепловой машины связан с задающим устройством вторым, устройством умножения первым и сравнивающим устройством первым, датчик положения регулирующего элемента органа топливоподачи связан с исполнительным механизмом, регулирующим органом, сравнивающим устройством вторым, устройством умножения первым, устройство умножения первое связано с устройствами коррекции первым, вторым и четвертым, сравнивающее устройство первое связано с задающим устройством первым и устройствами коррекции первым и третьим, устройство умножения второе связано с устройствами коррекции вторым и третьим, а также с устройством деления, которое, в свою очередь, связано с устройством коррекции четвертым, устройство суммирования связано с устройством коррекции первым, устройством деления и исполнительным механизмом, а сравнивающее устройство второе - с задающим устройством вторым и устройством изменения мощности агрегата нагрузки, которое связано с тепловой машиной.
Эта задача решается в предлагаемой автоматической самонастраивающейся микропроцессорной системе регулирования частоты вращения вала тепловой машины путем изменения коэффициента передачи регулятора kp при изменении мощности N таким образом, чтобы коэффициент передачи разомкнутой системы регулирования kрс, равный kp·kop (·kop - коэффициент передачи регулирования), оставался постоянным при всех режимах работы тепловой машины и всегда имел оптимальное значение kpc опт, то есть такое значение, при котором обеспечивается оптимальный переходной процесс с заданными показателями качества работы системы регулирования (с минимальным относительным перерегулированием ψ и минимальным временем регулирования τрег) (фиг.2.), где представлены зависимости коэффициентов kop, kp и kpc от мощности тепловой машины N при постоянном коэффициенте kp (а) и при постоянном коэффициенте kpc (б)).
На фигурах показаны:
фиг.1. Зависимости коэффициента передачи kµ и постоянной времени Tµ тепловой машины (дизельной установки) по регулирующему воздействию µ (подаче топлива в дизельную установку) от мощности N;
фиг.2. Зависимости коэффициентов kop, kp и kрс от мощности тепловой машины N при постоянном коэффициенте kp (а) и при постоянном коэффициенте kpc (б);
фиг.3. Функциональная схема автоматической самонастраивающейся микропроцессорной системы регулирования частоты вращения вала тепловой машины;
фиг.4. Зависимость параметров настройки ПИ-регулятора kµ·kp=kpc от отношения Tи/Tµ;
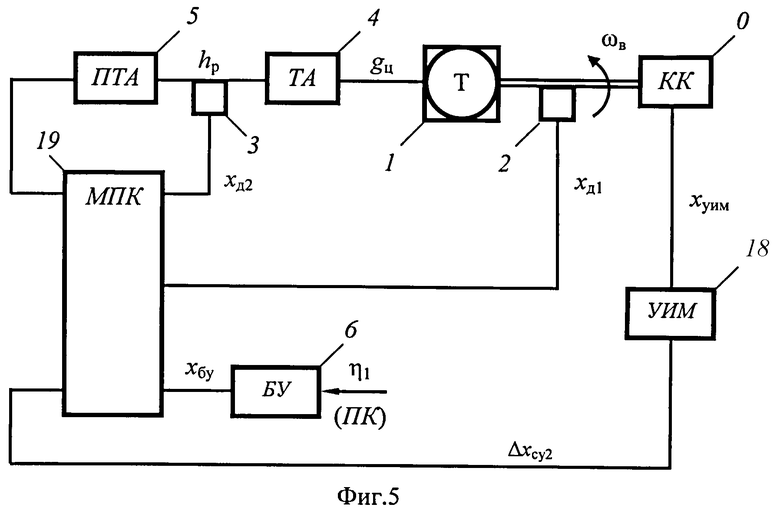
фиг.5. Принципиальная схема автоматической самонастраивающейся микропроцессорной системы регулирования частоты вращения вала тепловой машины
В предлагаемой системе регулирования при изменении мощности N изменяется динамический параметр настройки регулятора - постоянная времени интегрирования (время изодрома) Ти таким образом, что при всех режимах работы тепловой машины этот динамический параметр имеет оптимальное значение Ти опт. Таким образом, статический параметр kp и динамический параметр Ти ПИ-регулятора в предлагаемой системе регулирования являются функциями мощности N: kp(N) и Ти(N), то есть ПИ-регулятор в предлагаемой системе регулирования имеет переменные параметры настройки, изменяемые автоматически.
Для оценки качества работы автоматических систем удобно использовать коэффициент m, который получил название степени колебательности системы регулирования [15]. Так, например, если требуется, чтобы в переходном процессе амплитуда каждого последующего отклонения составляла одну десятую часть от амплитуды предыдущего, то степень колебательности должна быть выбрана равной m=0,366.
В автоматических системах регулирования частоты вращения валов дизельных установок часто применяют автоматические регуляторы частоты вращения, имеющие ПИ закон (алгоритм) работы
Δµ=kp·φ+(kp/Tи)·∫Δφ·dt
Постоянная времени Tи, значение которой характеризует степень ввода в закон работы регулятора интеграла от отклонения регулируемой величины от заданного значения по времени, получила название времени изодрома. В динамическом отношении ПИ-регулятор подобен соединению из двух параллельно включенных регуляторов: пропорционального с коэффициентом передачи kp и интегрального с коэффициентом передачи εр=kp/Ти. В предлагаемой системе регулирования закон работы регулятора описывается зависимостью
Δµ=kp(N)·Δφ+[kp(N)/Tи(N)]·∫Δφ·dt
Предлагаемая автоматическая самонастраивающаяся микропроцессорная система регулирования частоты вращения вала тепловой машины содержит следующие функциональные элементы (фиг.3.). Функциональная схема автоматической самонастраивающейся микропроцессорной системы регулирования частоты вращения вала тепловой машины) содержит объект регулирования 1 (ОР) частоты вращения вала - тепловая машина с агрегатом нагрузки; измерительное устройство 2 (ИУ1) регулируемой величины φ(ωв) - датчик частоты вращения вала тепловой машины; измерительное устройство 3 (ИУ2) регулирующего воздействия µ(gц) - датчик подачи топлива в тепловую машину, регулирующий орган 4 (РО); функции РО выполняет топливная аппаратура ТА; исполнительный механизм 5 (ИМ) - привод реек топливных насосов высокого давления или иглы электромагнитной форсунки (привод топливной аппаратуры ПТА); задающие устройства 6 (ЗУ1) и 7 (ЗУ2) с выходными сигналами xзу1 и хзу2 соответственно; сравнивающие устройства 8 (СУ1) и 9 (СУ2) с выходными сигналами ΔXcy1 и Δхсу2; устройства 10 (УК1) и 11 (УК2)) коррекции коэффициента передачи kp с выходными сигналами Xyк1 и xук2; устройство 12 (УК3) интегрирования по времени выходного сигнала Δxcy1 устройства 8 (СУ1) и устройство 13 (УК4) коррекции постоянной времени интегрирования Ти регулятора частоты вращения вала с выходными сигналами хук3 и хук4 соответственно; устройства умножения 14 (УУ1) и 15 (УУ2) с выходными сигналами хуу1 и хуу2; устройство деления 16 (УД) с выходным сигналом худ; устройство суммирования 17 (УС) с выходным сигналом хус; устройство изменения мощности УИМ (поз.18) агрегата нагрузки с выходным сигналом хуим. Устройства СУ1 и СУ2, ЗУ2, УК1, УК2, УК3, УК4, УУ1, УУ2, УД и УС входят в состав микропроцессорного контроллера 19 (МПК). Устройство ЗУ1 выполняет функции органа управления тепловой машиной, входным сигналом η1; для ЗУ1 является положение (ПК) рукоятки контроллера. Все устройства системы, кроме объекта регулирования, образуют микропроцессорный ПИ-регулятор с автоматически изменяемыми параметрами настройки (коэффициента передачи kp и постоянной времени интегрирования Ти).
В устройстве умножения УУ1 выполняется операция перемножения выходных сигналов устройств ИУ1 и ИУ2, в результате чего получается сигнал, эквивалентный мощности тепловой машины
хN=xд1·xд2,
где xд1 и xд2 - выходные сигналы датчиков ИУ1 и ИУ2.
В устройстве УК1 коэффициент передачи kyк1 изменяется в зависимости от сигнала мощности, в результате чего зависимость его выходного сигнала от входного сигнала описывается выражением
хук1=k10·(хN)n1·Δxcy1.
В этом выражении для коэффициента передачи устройства УК1 kyк1=k10·(хN)n1 значения коэффициента k10 и показателя степени n1 подбираются такими, которые обеспечивают требуемую зависимость коэффициента передачи регулятора частоты вращения от мощности тепловой машины (фиг.2 (б), линия kp).
В устройстве УК2 коэффициент передачи kук2 изменяется в зависимости от сигнала мощности, в результате чего зависимость его выходного сигнала от входного сигнала описывается выражением
xук2=k20·(xN)n2xN,
где в выражении для коэффициента передачи устройства УК2 kук2=к20*(хN)n2 значения коэффициента k20 и показателя степени n2 подбираются такими, которые обеспечивают требуемую зависимость коэффициента передачи регулятора частоты вращения от мощности тепловой машины (фиг.2 (б), линия kp).
В устройстве УК3 выполняется операция интегрирования, в результате чего зависимость его выходного сигнала от входного сигнала описывается выражением
xук3=∫Δхсу1·dt.
В устройстве УК4 постоянная времени интегрирования Ти (время изодрома регулятора) изменяется в зависимости от сигнала мощности, в результате чего зависимость его выходного сигнала от входного сигнала описывается выражением
xук4=Тиз·(xN)n3xN,
где в выражении для коэффициента передачи устройства УК4 kyк4=Тиз·(хN)n3 значения коэффициента Tиз и показателя степени n3 подбираются такими, которые обеспечивают требуемую зависимость времени изодрома регулятора частоты вращения от мощности тепловой машины.
В устройстве умножения УУ2 выполняется операция перемножения выходных сигналов устройств УК2 и УК3, в результате чего получается сигнал
xуу2=xук2·xук3.
В устройстве деления УД выполняется операция деления произведения выходных сигналов устройств УК2 и УК3 на выходной сигнал устройства УК4, в результате чего получается сигнал
худ=(xук2·хук3)/хук4.
В устройстве суммирования УС выполняется операция сложения выходных сигналов устройств УК1 и УД, в результате чего получается сигнал
хус=xук1+худ.
Выходной сигнал хус устройства УС является выходным сигналом микропроцессорного контроллера МПК и входным сигналом исполнительного механизма ИМ, который зависит не только от отклонения регулируемой величины Δxcy1, но и от интеграла этого отклонения по времени. В предлагаемой системе регулирования эти зависимости изменяются микропроцессорным контроллером при изменении мощности тепловой машины.
В результате действия микропроцессорного контроллера реализуется закон работы микропроцессорного регулятора частоты вращения предлагаемой автоматической самонастраивающейся микропроцессорной системы регулирования частоты вращения вала тепловой машины, описываемый выражением
Δgц=kpз·(хN)n1·Δωв+[(kpз·(xN)n1/(Tиз·(хN)n2]·∫Δωв·dt,
где kpз и Тиз являются заданными базовыми значениями коэффициента передачи и времени изодрома предлагаемого микропроцессорного регулятора частоты вращения вала тепловой машины. Величина Δωв эквивалентна величине Δхсу1 при Δη1=0, то есть при постоянном значении сигнала задания η1.
Передаточная функция системы регулирования в замкнутом состоянии

где Т1=[(1+kµ·kр)/kµ·kp]·Ти Т2=(Ти·Тµ)/(kµ·kp).
Граница области на плоскости параметров настройки kµ·kp и Tи регулятора частоты вращения, внутри которой степень колебательности будет не меньше заданного значения m, определяется из выражения [15]
Tи=(4m2·kµ·kp·Tµ)/[1+m2(1+kµ·kp)2]
или, в частности, для m=0,366,
Tи=0,475kµ·kp·Tµ/(1+kµ·kp)2
Зависимость параметров настройки ПИ-регулятора kµ·kp=kpc от отношения Tи/Тµ Гц приведена на фиг.4. Точка, соответствующая оптимальной настройке регулятора частоты вращения, располагается на кривой в плоскости параметров настройки, ограничивающей область необходимой устойчивости системы регулирования, при возможно большем значении коэффициента передачи регулятора kp. Поэтому оптимальные значения параметров настройки определяются из формул:
kp опт=kp макс; Tи опт=0,475kµ·kр опт·Тµ/(1+kµ·kр опт)2.
Таким образом, ПИ-регулятор частоты вращения в предлагаемой системе регулирования имеет оптимальные значения параметров настройки: kµ·kр опт=7,5 и Ти опт/Тµ=0,05 (фиг.4) [15] при всех режимах работы тепловой машины.
Предлагаемая автоматическая самонастраивающаяся микропроцессорная система регулирования частоты вращения вала тепловой машины содержит следующие элементы (фиг.5). агрегат нагрузки 20 (АН), приводимый тепловой машиной 1, датчик 2 частоты вращения вала тепловой машины, датчик 3 подачи топлива (перемещения hp регулирующего элемента топливной аппаратуры) в тепловую машину, блок управления 6 (БУ) тепловой машиной; микропроцессорный контроллер 19; привод 5 (ПТА) регулирующего элемента топливной аппаратуры, топливную аппаратуру 4 (ТА), устройство 18 изменения мощности УИМ агрегата нагрузки.
Предлагаемая автоматическая самонастраивающаяся микропроцессорная система регулирования частоты вращения вала тепловой машины является комбинированной. В ней осуществляется параметрическая компенсация действия мощности на статические и динамические параметры тепловой машины как объекта регулирования частоты вращения вала. При наличии информации о статических и динамических характеристиках и параметрах элементов системы регулирования микропроцессорный контроллер в соответствии с заложенной в него программой рассчитывает и изменяет параметры настройки системы таким образом, что в результате она имеет высокие показатели качества работы при всех режимах работы тепловой машины.
Предлагаемая автоматическая самонастраивающаяся микропроцессорная система регулирования частоты вращения вала тепловой машины работает следующим образом (фиг.3 и 5). При установившемся режиме работы системы регулирования значения всех сигналов элементов системы постоянны, а отклонение Δxcy1=0. После увеличения сигнала задания η1 появляется сигнал Δxcy1=хзу1-хд1, который вызывает увеличение сигналов хук1, хук3, хуу2, худ, хус, hим(hр), gц, ωв и хд1. Увеличение сигнала хд1 приводит к уменьшению сигнала Δxcy1.
После увеличения сигнала задания η1 увеличивается также и мощность N тепловой машины в соответствии с характеристикой его нагружения агрегатом нагрузки. Увеличение мощности N, а значит и увеличение сигналов hp, хд2 и gц, приводит к увеличению сигнала xN, под действием которого изменяются сигналы xук2, xук4, xуу2, худ и хус. При Δxcy1=0 наступает новый установившийся режим работы системы регулирования. Таким образом, предлагаемая автоматическая самонастраивающаяся микропроцессорная система регулирования частоты вращения вала тепловой машины относится к классу беспоисковых адаптивных автоматических систем регулирования [16].
В тяговых транспортных машинах, например, в тепловозах, сновная часть мощности тепловой машины (свободная мощность) затрачивается на передачу мощности, а меньшая часть (до 15%) - на привод вспомогательных агрегатов (вентиляторов, компрессоров, насосов и др.), которая может при работе тепловой машины изменяться в широком диапазоне. Для использования мощности, не затрачиваемой на привод вспомогательных агрегатов, в предлагаемой системе регулирования в программу работы устройства ЗУ2 закладывается требуемая зависимость подачи топлива от частоты вращения вала тепловой машины gц(ωв) для обеспечения реализации требуемой характеристики нагружения двигателя агрегатом нагрузки N(ωв). При превышении заданного значения подачи топлива gц на выходе устройства СУ2 при заданной ωв появляется сигнал Δхсу2>0, что приводит к соответствующему изменению выходного сигнала xуим устройства УИМ и к уменьшению мощности агрегата нагрузки. При подаче топлива gц меньше заданного значения подачи топлива gцз на выходе устройства СУ2 при заданной ωв появляется сигнал Δхсу2<0, что приводит к соответствующему изменению выходного сигнала хуим устройства УИМ и к увеличению мощности агрегата нагрузки. Таким образом, регулирование частоты вращения вала тепловой машины в данном случае осуществляется по сигналу подачи топлива gц, то есть по мощности N - возмущающему воздействию на объект регулирования. В предлагаемой системе осуществляется регулирование частоты вращения вала тепловой машины по отклонению и по возмущению, то есть комбинированное регулирование [10], что обеспечивает высокие показатели качества работы предлагаемой системы регулирования.
Изменения вышеназванных сигналов приводят не только к изменению выходного сигнала регулятора частоты вращения gц, но и к соответствующим изменениям статического kp и динамического Ти параметров настройки предлагаемой автоматической самонастраивающейся микропроцессорной системы регулирования частоты вращения вала тепловой машины.
В предлагаемой автоматической самонастраивающейся микропроцессорной системе регулирования частоты вращения вала тепловой машины изменение мощности тепловой машины приводит к автоматическому изменению параметров ее настройки, что обеспечивает работу системы регулирования с высокими показателями качества при всех режимах работы тепловой машины. Это обеспечивает снижение расхода топлива, увеличение моторесурса тепловой машины и уменьшение выброса вредных веществ.
Технический результат достигается за счет того, что автоматическая самонастраивающаяся микропроцессорная система регулирования частоты вращения вала тепловой машины содержит тепловую машину (объект регулирования) с агрегатом нагрузки, топливную аппаратуру с приводом (исполнительным механизмом) регулирующего элемента органа топливоподачи (регулирующего органа), датчик частоты вращения вала и датчик положения регулирующего элемента органа топливоподачи, блок управления тепловой машиной (задающее устройство первое), задающее устройство второе; сравнивающее устройство второе; устройства умножения первое и второе; устройства коррекции первое, второе, третье и четвертое; устройство деления; устройство суммирования; устройство изменения мощности агрегата нагрузки; причем сравнивающие устройства первое и второе, задающее устройство второе, устройства умножения первое и второе; устройства коррекции первое, второе, третье и четвертое; устройство деления и устройство суммирования входят в состав микропроцессорного контроллера; в устройстве умножения первом выполняется операция перемножения выходных сигналов датчика частоты вращения вала и датчик положения регулирующего элемента органа топливоподачи; в устройстве коррекции первом выполняется коррекция коэффициента передачи регулятора в зависимости от текущего значения мощности и от разности заданного и текущего значений мощности тепловой машины; в устройстве коррекции втором выполняется коррекция коэффициента передачи регулятора в зависимости от текущего значения мощности тепловой машины; в устройстве коррекции третьем выполняется операция интегрирования по времени выходного сигнала (отклонения измеренного значения частоты вращения вала от заданного) сравнивающего устройства первого; в устройстве коррекции четвертом время изодрома регулятора изменяется в зависимости от мощности тепловой машины; в устройстве умножения втором выполняется операция умножения выходных сигналов устройств коррекции второго и третьего; в устройстве деления выполняется операция деления произведения выходных сигналов устройств коррекции второго и третьего на выходной сигнал устройства коррекции четвертого; в устройстве суммирования выполняется операция сложения выходных сигналов устройства коррекции первого и устройства деления; при этом датчик частоты вращения вала тепловой машины связан с задающим устройством вторым, устройством умножения первым и сравнивающим устройством первым; датчик положения регулирующего элемента органа топливоподачи связан с исполнительным механизмом, регулирующим органом, сравнивающим устройством вторым, устройством умножения первым; устройство умножения первое связано с устройствами коррекции первым, вторым и четвертым; сравнивающее устройство первое связано с задающим устройством первым и устройствами коррекции первым и третьим; устройство умножения второе связано с устройствами коррекции вторым и третьим, а также с устройством деления, которое, в свою очередь, связано с устройством коррекции четвертым; устройство суммирования связано с устройством коррекции первым, устройством деления и исполнительным механизмом, а сравнивающее устройство второе - с задающим устройством вторым и устройством изменения мощности агрегата нагрузки, которое связано с тепловой машиной; микропроцессорный контроллер содержит программу с математической моделью пропорционально-интегрального регулятора частоты вращения вала, в соответствии с этой программой автоматически изменяется коэффициент передачи регулятора таким образом, чтобы коэффициент передачи системы регулирования оставался постоянным во всех диапазонах изменения мощности, и автоматически изменяется время изодрома регулятора в зависимости от мощности тепловой машины.
Перечень использованной литературы
1. Патент РФ №2084668 кл. F02D 1/12.
1. Патент РФ 2066386 кл. FO2D 1/18.
2. Патент РФ 2230923 кл. FO2D 1/18.
3. Патент РФ 2231663 кл. FO2D 1/08.
4. Патент РФ 2237180 кл. FO2D 1/18.
5. Патент РФ 2290523 кл. FO2D 1/08 (2006.01), FO2D 1/18 (2006.01).
6. Патент РФ 2299342 кл. FO2D 1/08 (2006.01).
7. Патент РФ 2159860 кл. FO2D 1/10.
8. Луков Н.М. Основы автоматики и автоматизации тепловозов. - М.: Транспорт, 1989.
9. Луков Н.М. Автоматизация тепловозов, газотурбовозов и дизель-поездов. - М.: Машиностроение, 1988.
11. Ланчуковский В.И., Козьминых А.В. Автоматизированные системы управления судовых дизельных и газотурбинных установок. - М.: Транспорт, 1983.
12. Слесаренко В.Н. Автоматизированные системы управления судовыми энергетическими установками. - Владивосток, 2006, стр.217.
13. Кругов В.И. Двигатель внутреннего сгорания как регулируемый объект. - М: Машиностроение, 1978.
14. Левин М.И. Автоматизация судовых дизельных установок. - Л: Судостроение, 1969.
15. Ротач В.Я. Расчет настройки промышленных систем регулирования. - Л.: ГЭИ, 1961, стр.132-135.
16. Справочник по теории автоматического управления / Под ред. А.А. Красовского. - М.: Наука, 1987.
| название | год | авторы | номер документа |
|---|---|---|---|
| АВТОМАТИЧЕСКАЯ САМОНАСТРАИВАЮЩАЯСЯ МИКРОПРОЦЕССОРНАЯ СИСТЕМА РЕГУЛИРОВАНИЯ ЧАСТОТЫ ВРАЩЕНИЯ ВАЛА ТЕПЛОВОЙ МАШИНЫ | 2012 |
|
RU2504678C1 |
| АВТОМАТИЧЕСКИЙ КОМБИНИРОВАННЫЙ МИКРОПРОЦЕССОРНЫЙ РЕГУЛЯТОР ТЕМПЕРАТУРЫ ЭНЕРГЕТИЧЕСКОЙ УСТАНОВКИ ТРАНСПОРТНОГО СРЕДСТВА | 2010 |
|
RU2426895C1 |
| ЭЛЕКТРИЧЕСКАЯ ПЕРЕДАЧА МОЩНОСТИ ПЕРЕМЕННОГО ТОКА ТЯГОВОГО ТРАНСПОРТНОГО СРЕДСТВА С МИКРОПРОЦЕССОРНОЙ СИСТЕМОЙ УПРАВЛЕНИЯ | 2013 |
|
RU2554911C2 |
| АВТОМАТИЧЕСКАЯ КОМБИНИРОВАННАЯ МИКРОПРОЦЕССОРНАЯ СИСТЕМА РЕГУЛИРОВАНИЯ ТЕМПЕРАТУРЫ СГЛАЖИВАЮЩЕГО РЕАКТОРА ТЯГОВОГО ТРАНСПОРТНОГО СРЕДСТВА | 2008 |
|
RU2406622C2 |
| АВТОМАТИЧЕСКИЙ КОМБИНИРОВАННЫЙ МИКРОПРОЦЕССОРНЫЙ РЕГУЛЯТОР ТЕМПЕРАТУРЫ ТЕПЛОВОЙ МАШИНЫ С ЭЛЕКТРИЧЕСКИМ ПРИВОДОМ ВЕНТИЛЯТОРА | 2011 |
|
RU2501961C2 |
| Автоматическая микропроцессорная система регулирования температуры энергетической установки транспортного средства | 2016 |
|
RU2645519C1 |
| АВТОМАТИЧЕСКИЙ КОМБИНИРОВАННЫЙ МИКРОПРОЦЕССОРНЫЙ РЕГУЛЯТОР ТЕМПЕРАТУРЫ ТЕПЛОВОЙ МАШИНЫ С МЕХАНИЧЕСКИМ ПРИВОДОМ ВЕНТИЛЯТОРА | 2011 |
|
RU2492335C2 |
| АВТОМАТИЧЕСКИЯ СИСТЕМА ЭКСТРЕМАЛЬНОГО РЕГУЛИРОВАНИЯ ТЕМПЕРАТУРЫ НАДДУВОЧНОГО ВОЗДУХА ТЕПЛОВОЙ МАШИНЫ | 2007 |
|
RU2349770C1 |
| АВТОМАТИЧЕСКАЯ КОМБИНИРОВАННАЯ МИКРОПРОЦЕССОРНАЯ СИСТЕМА РЕГУЛИРОВАНИЯ ДАВЛЕНИЯ В ПНЕВМАТИЧЕСКОЙ СИСТЕМЕ ТЯГОВОГО ТРАНСПОРТНОГО СРЕДСТВА | 2011 |
|
RU2502115C2 |
| АВТОМАТИЧЕСКИЙ КОМБИНИРОВАННЫЙ МИКРОПРОЦЕССОРНЫЙ РЕГУЛЯТОР ТЕМПЕРАТУРЫ ТЕПЛОВОЙ МАШИНЫ С ЭЛЕКТРИЧЕСКИМ ПРИВОДОМ ВЕНТИЛЯТОРА | 2011 |
|
RU2503558C2 |
Изобретение относится к области двигателестроения, в частности к автоматическим системам регулирования частоты вращения валов тепловых машин с двигателями внутреннего сгорания. Технический результат заключается в высоких показателях качества системы регулирования при всех режимах работы тепловой машины. Это обеспечивает снижение расхода топлива, увеличение моторесурса тепловой машины и уменьшение выброса вредных веществ. Автоматическая самонастраивающаяся микропроцессорная система регулирования частоты вращения вала тепловой машины содержит тепловую машину с агрегатом нагрузки, топливную аппаратуру с приводом регулирующего элемента органа топливоподачи, датчик частоты вращения вала и датчик положения регулирующего элемента органа топливоподачи, блок управления тепловой машиной. Система регулирования содержит также задающее устройство второе, сравнивающее устройство второе, устройства коррекции первое, второе, третье и четвертое, устройства умножения первое и второе, устройство деления, устройство суммирования, устройство изменения мощности агрегата нагрузки. При этом сравнивающие устройства первое и второе, задающее устройство второе, устройства умножения первое и второе, устройства коррекции первое, второе, третье и четвертое, устройство деления и устройство суммирования входят в состав микропроцессорного контроллера, содержащего программу с математической моделью пропорционально-интегрального регулятора частоты вращения вала. 5 ил.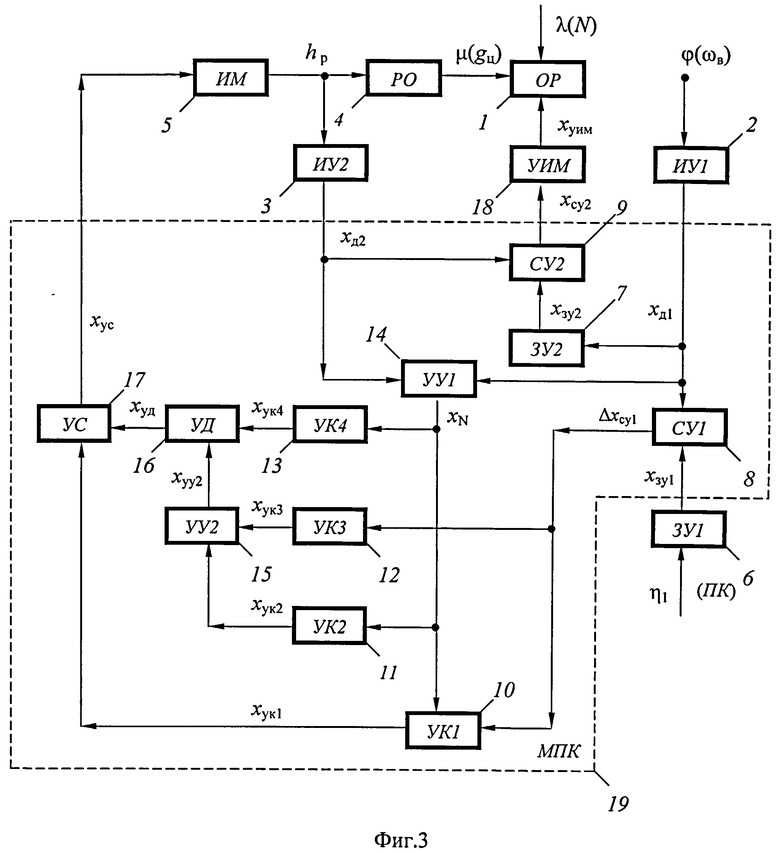
Автоматическая самонастраивающаяся микропроцессорная система регулирования частоты вращения вала тепловой машины, содержащая тепловую машину (объект регулирования) с агрегатом нагрузки, топливную аппаратуру с приводом (исполнительным механизмом) регулирующего элемента органа топливоподачи (регулирующего органа), датчик частоты вращения вала и датчик положения регулирующего элемента органа топливоподачи, блок управления тепловой машиной (задающее устройство первое), отличающаяся тем, что она содержит задающее устройство второе, сравнивающее устройство второе, устройства коррекции первое, выполняющее коррекцию коэффициента передачи регулятора в зависимости от текущего значения мощности и от разности заданного и текущего значений мощности тепловой машины, второе, выполняющее коррекцию коэффициента передачи регулятора в зависимости от текущего значения мощности тепловой машины, третье, выполняющее операцию интегрирования по времени выходного сигнала (отклонения измеренного значения частоты вращения вала от заданного) сравнивающего устройства первого, и четвертое, изменяющее время изодрома регулятора в зависимости от мощности тепловой машины, устройства умножения первое и второе, устройство деления, устройство суммирования, выполняющее операцию сложения выходных сигналов устройства коррекции первого и устройства деления, устройство изменения мощности агрегата нагрузки, при этом сравнивающие устройства первое и второе, задающее устройство второе, устройства умножения первое, выполняющее операции перемножения выходных сигналов датчика частоты вращения вала и датчика положения регулирующего элемента органа топливоподачи, и второе, выполняющее операции умножения выходных сигналов устройств коррекции второго и третьего, устройства коррекции первое, второе, третье и четвертое, устройство деления, выполняющее операции деления произведения выходных сигналов устройств коррекции второго и третьего на выходной сигнал устройства коррекции четвертого, и устройство суммирования входят в состав микропроцессорного контроллера, содержащего программу с математической моделью пропорционально-интегрального регулятора частоты вращения вала, в соответствии с которой автоматически изменяется коэффициент передачи регулятора таким образом, чтобы коэффициент передачи системы регулирования оставался постоянным во всех диапазонах изменения мощности, и автоматически изменялось время изодрома регулятора в зависимости от мощности тепловой машины, датчик частоты вращения вала тепловой машины связан с задающим устройством вторым, устройством умножения первым и сравнивающим устройством первым, датчик положения регулирующего элемента органа топливоподачи связан с исполнительным механизмом, регулирующим органом, сравнивающим устройством вторым, устройством умножения первым, устройство умножения первое связано с устройствами коррекции первым, вторым и четвертым, сравнивающее устройство первое связано с задающим устройством первым и устройствами коррекции первым и третьим, устройство умножения второе связано с устройствами коррекции вторым и третьим, а также с устройством деления, которое, в свою очередь, связано с устройством коррекции четвертым, устройство суммирования связано с устройством коррекции первым, устройством деления и исполнительным механизмом, а сравнивающее устройство второе - с задающим устройством вторым и устройством изменения мощности агрегата нагрузки, которое связано с тепловой машиной.
| ЭЛЕКТРОННО-МЕХАНИЧЕСКИЙ РЕГУЛЯТОР ЧАСТОТЫ ВРАЩЕНИЯ ДИЗЕЛЯ | 1997 |
|
RU2159860C2 |
| RU 2066386 C1, 10.09.1996 | |||
| ЭЛЕКТРОННЫЙ РЕГУЛЯТОР ЧАСТОТЫ ВРАЩЕНИЯ ДЛЯ УПРАВЛЕНИЯ ПОДАЧЕЙ ТОПЛИВА НАСОСОМ ВЫСОКОГО ДАВЛЕНИЯ | 2003 |
|
RU2230923C1 |
| ИСПОЛНИТЕЛЬНЫЙ МЕХАНИЗМ ЭЛЕКТРОННОЙ СИСТЕМЫ РЕГУЛИРОВАНИЯ ЧАСТОТЫ ВРАЩЕНИЯ ДИЗЕЛЯ | 2002 |
|
RU2231663C2 |
| ЭЛЕКТРОННЫЙ РЕГУЛЯТОР ЧАСТОТЫ ВРАЩЕНИЯ ДЛЯ УПРАВЛЕНИЯ ПОДАЧЕЙ ТОПЛИВА ТОПЛИВНЫМ НАСОСОМ ВЫСОКОГО ДАВЛЕНИЯ | 2005 |
|
RU2290523C1 |
| ЭЛЕКТРОННЫЙ РЕГУЛЯТОР УПРАВЛЕНИЯ ПОДАЧЕЙ ТОПЛИВА В ДИЗЕЛЕ | 2006 |
|
RU2299342C1 |
| БЛОК УПРАВЛЕНИЯ ВПРЫСКОМ ТОПЛИВА В ДВИГАТЕЛЬ ВНУТРЕННЕГО СГОРАНИЯ | 1996 |
|
RU2117799C1 |
| СИСТЕМА УПРАВЛЕНИЯ ДВИГАТЕЛЕМ | 2004 |
|
RU2267021C1 |
| JP 2012036892 A, 23.02.2012. | |||

