изобретение относится к строитель ству и ремонту железнодорожного пути и, в частности, касается его выправки. Известен способ выправки железнодорожного пути, заключаквдийся в том что поднимают путь на требуемую величину, удерживают его в этом положении посредством фиксирующего устройства и производят уплотнение бал ласта в зоне пересечения рельсов и шпсш посредством вибрации и давления передаваемых рабочим органом, до упо ра каждого участка пути в фиксируюадее устройство Cl Давление, передаваемое рабочим органом на путь, постоянно на всем протяжении выправляемого участка пу ти, независимо от величины его подъе мк, что приводит к неравномерному уплотнению балласта и, вследствие этого, некачественной выправке пути Известна машина для выправки железнодорожного пути, содержащая сам ходное шасси, подбивочные инструмен ты с виброприводами и приводами обжатия балласта, смонтированные на раме шасси с возможностью перемещения в вертикальной плоскости приво дом. и расположенные перпендикулярно и параллельно продольной оси машины , и с обеих сторон от нее, установленный на раме шасси вблизи подбивочных инструментов путеподъемник с приводом перестановки его по высоте, а также смонтированные на раме шасси устройство блокировки привода путеподъемника, гидросистему, блок управления и систему отсчета, включающую в себя измерительные тележки и тро-сы:-хорды, связывающие указанные тепежки, датчики положения пути в .продольном профиле, связанньае с соответствующими тросами -хордами и. указанным приводом путеподъемника через Устройство его блокировки, причем блок управления электрически связан с системой отсчета, приводом перестановки путеподъемника и приводами об жатия балласта 2 . Цель изобретения - повышение качества выправки пути. Для достижения этой цели давление рабочего органа на балласт устанавливают пропорциональным величине подъемки пути на каждом участке. KpOMQ того, машина для регшизации предлагаемого способа снабжена запо минающим блоком, клапаном регулировки давления, электрогидравлическим клапаном и концевым выключателем, причем каждый датчик положения пути в продольном, профиле через запоминающий блок и клапан регулировки давлет НИН связан с напорной магистралью гидросистемы, а через концевой выключатель и электрогидравлический клапан - с соответствующими приводами обжатия балласта.
При этсЭч устройство блокировки привода перестановки путеподъемника по высоте содержит пороговый переклкячатель, соединенный электрически с датчиком положения пути в продольном профиле, И запорный клапан, связанный с. указанным приводом путеподъемника.
Кроме того, запоминающий блок соединен с клапаном регулировки давлени и содержит элемент сравнения, датчик перемещения и мотор, включенный межд элементом сравнения и указанным дат.чиком перемещения. .
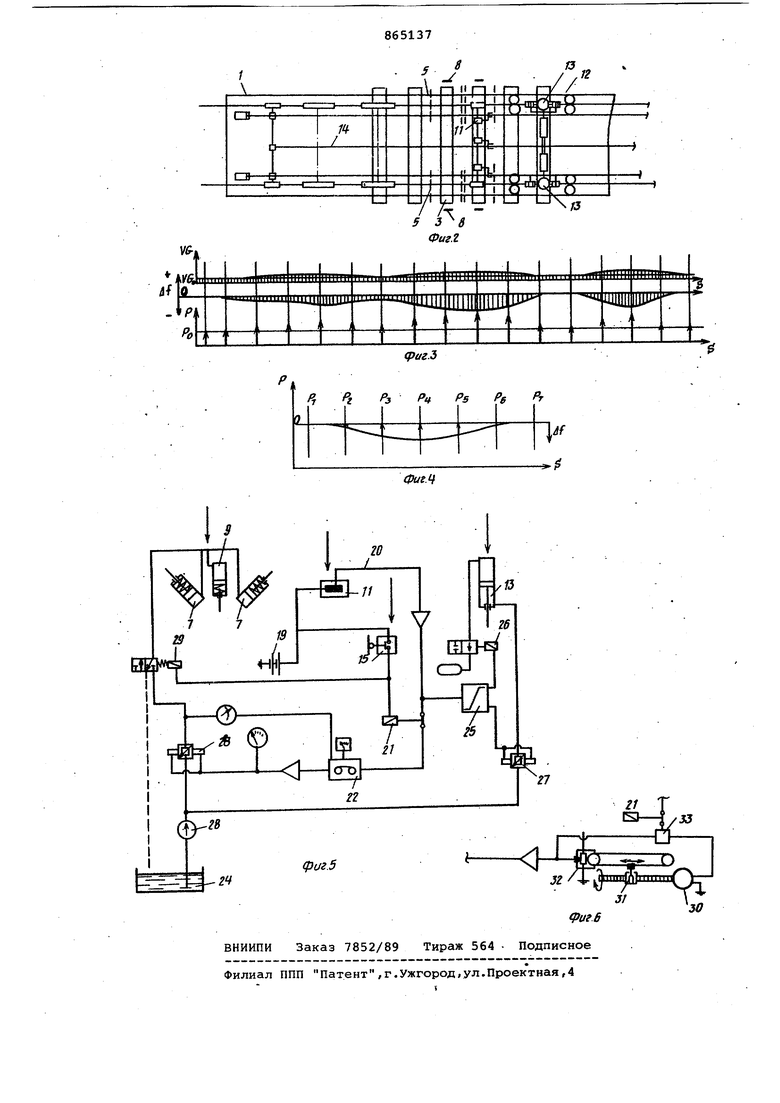
На фиг. 1 изображена машина для выправки железнодорожного пути-, вид сбоку; на фиг. 2 -устройство выправки этой машины, вид сверху; на фиг.
3- диаграмма распределения отклонений, конечного давления подбивки и достигнутых коэффициентов уплотнения обработанного участка пути; на фиг.
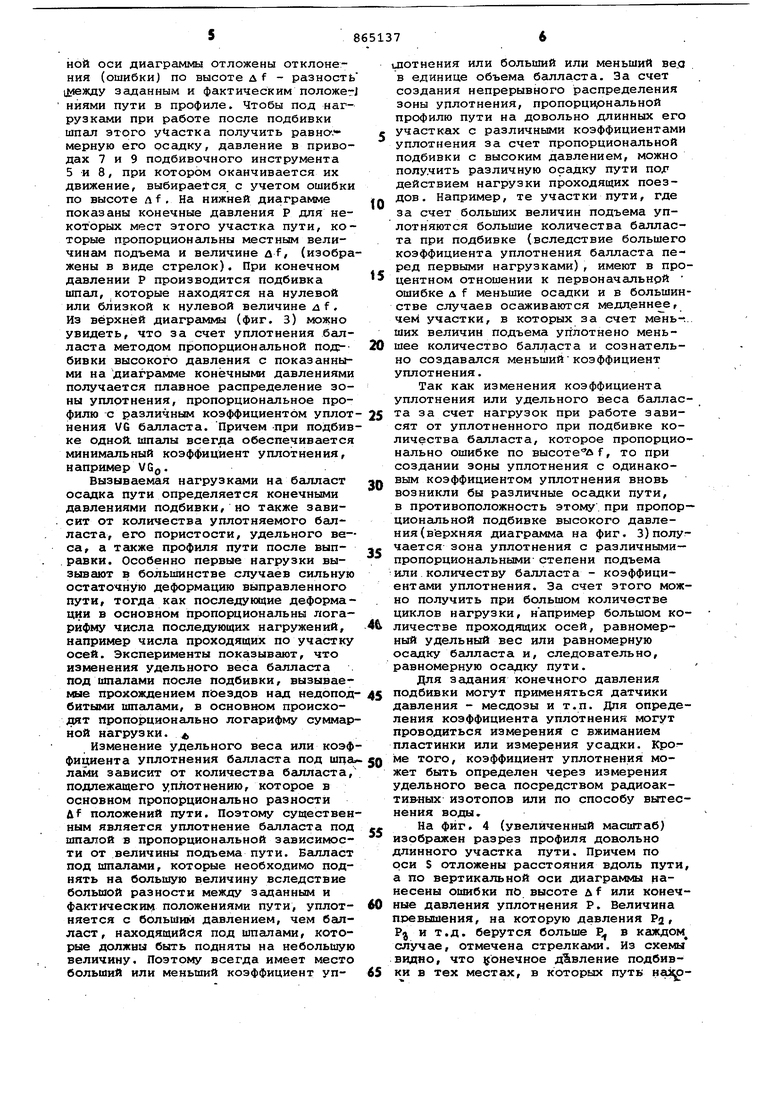
4-.диаграмма ошибок по высоте и конечных давлений, соответствующих отгдельным значениям ошибок; на фиг. 5 упрощенная схема устройства управле ния машины; на фиг. 6 - схема устройства управления со следящим мотором.
Машина для выправки железнодорожного пути представляет собой самоходное шасси 1, перемещаемое по пути 2, состоящему из шпгш и . Машина для уплотнения бгшласта под шпалами 3 пути имеет установленные на переставляемом по высоте носителе 4 подбивочные инструменты 5, которые могут приводиться в колебательное движение виброприводом 6 и посредством приводов 7 обжатия бгшласта могут сближаться друг с другом в направлении к подбиваемой шпале, с обеих длинных СТОРОН шпалы установлены подбивочные инструменты 5, .а также предусмотрены дополнительные подбивочные инструменты 8 с каждого из торгов подбиваемой шпалы. Причем все инструменты укреплены на носителе 4 подбивочных инструментов. Подбивочные инструменты 8 служат при этом для того, чтобы при асинхронной подбивке шпалы (уплотнении балласта под ней) предотвратить уход балласта вдоль шпалы наружу, и они посредством собственных приводов 9 обжатия балласта могут переставляться в направлении, перпендикуляоном пути. Однако можно машину для выправки пути оборудовать одним носителем подбивоч ного инструмента, который несет подбивочные инструменты для одновременной подбивки двух соседних шпал, как ©то показано на фиг. 2 тонкими линиями.
Дпя нивелирования пути машина оборудована системой отсчета 10, которая имеет две, по одной для каждой рельсовой нити базовой прямой, выполненной, например, в виде проволочного троса. Для определения отклонения пути 2 от системы отсчета 10 установлены независимо перемещаемые по высоте от рамы шасси 1 и вдоль пути измерительные датчики 11 положения пути в продольном профиле, например регулируемые емкости или сопротивления. Измерительные датчики 11 определяют положение системы отсчета 10 посредством охватывающих базовую прямую вилкообразных рычагов. Конечные точки этих прямых, а также измертельные датчики 11 движутся по рельсам с помощью собственных.тележек, которые при транспортных перемещениях машины могут быть приподняты над рельсами,
Для подъема пути 2 по ходу движения перед подбивочными инструментами 5 и 8 установлен путеподъемник 12, который посредством привода 13, например гидравлического цилиндра, может перемещаться по высоте. Путеподъемник 12 выполнен как фиксирующее путь устройство. Чтобы.избежать возможного подъема пути выше нужного уровня в области подбивочного инструмента, путеподъемник должен разкющатся как можно ближе к месту подбивки. Машина может быть.также дополнительно .оборудована фиксирующим путь устройством непосредственно в области подбиваемой шпалы или шпал. Для выправления пути в поперечном направлении машина добавочно оборудована ба зовой прямой 14 и выправляющими инструментами, которые в показанном примере выполнения могут быть совмещены с путеподъемником.
Приводы 6,7 и 9 подбивочных инструментов и привод 13 путеподъемника 12, измерительный датчик 11, а также орабатывеисхций при опускании носителя 4 подбивочного инструмента концевой выключатель 15 соединены с блоком управления 16 для пропорционального уплотнения балласта высоким давлением. Для контроля работы и для установки или коррекции блока управления. 16 обслуживающим персоналом на раме шасси установлены ручной пульт управления 17 и контрольные приборы 18.
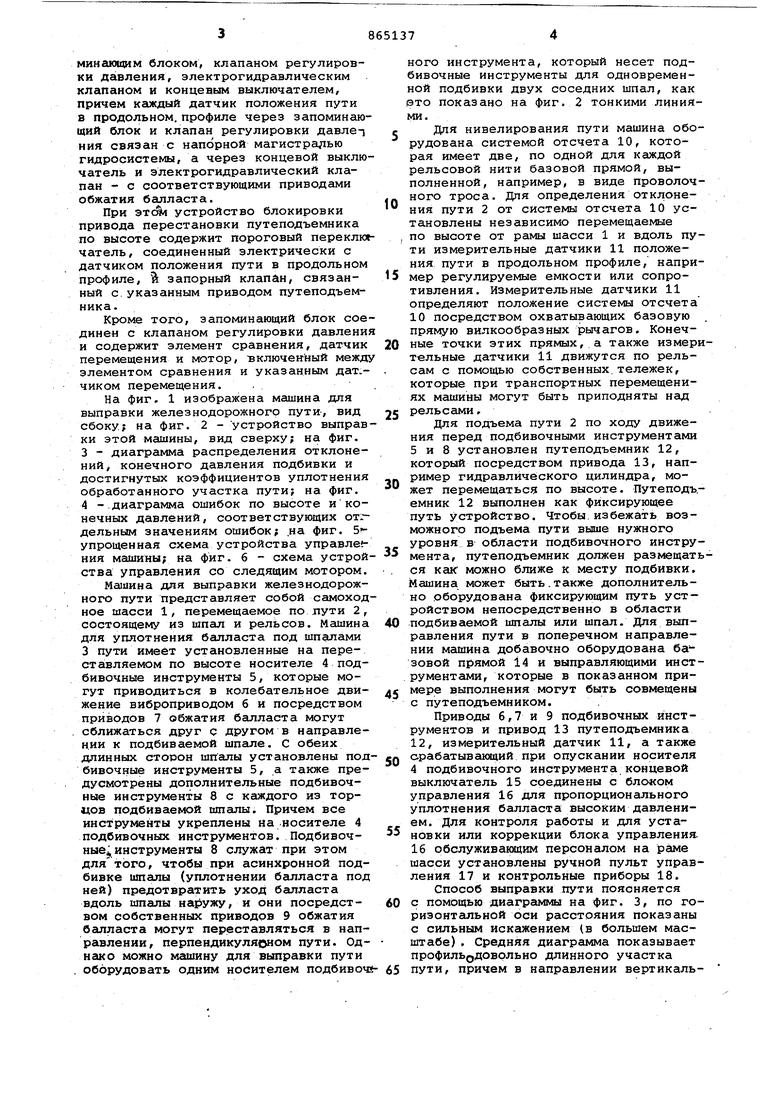
Способ выправки пути поясняется с помощью диаграммы на фиг. 3, по горизонтальной оси расстояния показаны с сильным искажением (в большем масштабе) , Средняя диаграмма показывает профильфдоврльно длинного участка пути, причем в направлении вертикальной оси диаграммы отложены отклонения (ошибки) по высоте д f - разность заданным и фактическим положег нйями пути в профиле. Чтобы под нагрузками при работе после подбивки шпал этого участка получить равнамерную его осадку, давление в приводах 7 и 9 подбивочного инструмента 5 и 8, при котором оканчивается их движение, выбирается с учетом ошибки по высоте Af, На нижней диаграмме показаны конечные давления Р для некоторых мест этого участка пути, которые пропорциональны местным величинам подъема и величине /if, (изображены в виде стрелок). При конечном давлении Р производится подбивка шпал, которые находятся на нулевой или близкой к нулевой величине л f . Из верхней диаграммы (фиг. 3) можно увидеть, что за счет уплотнения балласта методом пропорциональной подг бивки высокого давления с показанными на диаграмме конечными давлениями получается плавное распределение зоны уплотнения, пропорциональное профилю -с различным коэффициентом уплот нения VG бешласта. Причем -при подбивке одной, шпалы всегда обеспечивается минимальный коэффициент уплотнения, например VGg.
Вызываемая нагрузками на балласт осадка пути определяется конечными давлениями подбивки, но также зависит от количества уплотняемого балласта, его пористости, удельного веса, а также профиля пути после выпразки. Особенно первые нагрузки вызывают в большинстве случаев сильную остаточную деформацию выправленного пути, тогда как последующие деформации в основном пропорциональны логарифму числа последующих нагружений, например числа проходящих по участку осей. Эксперименты показывгиот, что изменения удельного веса балласта под шпалами после подбивки, вызываемые прохождением п&ездов над недопод битыми шпалами, в основном происходят пропорционально логарифму суммарной нагруз ки. 4)
Изменение удельного веса или коэффициента уплотнения балласта под шца лами зависит от количества балласта, подлежащего уплотнению, которое в основном пропорционально разности Af положений пути. Поэтому существенным является уплотнение балласта под шпалой в пропорциональной зависимости от величины подъема пути. Балласт под шпсшами, которые необходимо поднять на большую величину вследствие большой разности между заданным и фактическим положениями пути, уплотняется с большим давлением, чем балласт, находящийся под шпалами, которые должны быть подняты на небольшую величину. Поэтому всегда имеет место больший или меньший коэффициент упшотнения или больший или меньший ве.а в единице объема балласта. За счет создания непрерывного распределения зоны уплотнения, пропорци,ональной профилю пути на довольно длинных его участках с различными коэффициентами уплотнения за счет пропорциональной подбивки с высоким давлением, можно получить различную осадку пути подт действием нагрузки проходящих поездов. Например, те участки пути, где за счет больших величин подъема уплотняются большие количества балласта при подбивке (вследствие большего коэффициента уплотнения балласта перед первыми нагрузками), имеют в процентном отношении к первоначальной ошибке д f меньшие осадки и в большинстве случаев осаживаются медленнее, чем участки, в которых за счет мень-. ших величин подъема уплотнено меньшее количество бaлJ;Iacтa и сознательно создавался меньший коэффициент уплотнения.
Так как изменения коэффициента уплотнения или удельного веса балласта за счет нагрузок при работе зависят от уплотненного при подбивке количества балласта, которое пропорционально ошибке по выcoтe лf, то при создании зоны уплотнения с одинаковым коэффициентом уплотнения вновь возникли бы различные осадки пути, в противоположность этому при пропор- ционсшьной подбивке высокого давления (верхняя диаграмма на фиг. 3)получается- зона уплотнения с различнымипропорциональными степени подъема или количеству балласта - коэффициентами уплотнения. За счет этого можно получить при большом количестве циклов нагрузки, например большом количестве проходящих осей, равномерный удельный вес или равномерную осадку балласта и, следовательно, равномерную осадку пути.
Для задания конечного давления подбивки могут применяться датчики давления - месдозы и т.п. Для определения коэффициента уплотнения могут проводиться измерения с вжиманием пластинки или измерения усадки. Кро ме того, коэффициент уплотнения может быть определен через измерения удельного веса посредством радиоактив-ных изотопов или по способу вытеснения воды.
На фиг. 4 (увеличенный масштаб) изображен разрез профиля довольно длинного участка пути. Причем по оси S отложены расстояния вдоль пути, а по вертикальной оси диаграммы нанесены ошибки по высоте д f или конечные давления уплотнения Р. Величина превышения, на которую давления Рд, PJ и т.д. берутся больше Р в каждом случае, отмечена стрелками. Из схемы видно, что конечное давление подбивки в тех местах, в которых путь насЦрдится приблизительно в нулевом положении, в общем., одинаково и равно iaeличине Р , которая выбирается, напри мер, в зависимости от состояния балласта, тогда, как давления р/ и Р соответственно ошибке по высоте д f (см, ход кривой) увеличиваются, на по .каэанную стрелками величину до макримального конечного давления подбив Ки Р в области максимальной ошибки ;Ло, высоте, которое сильнее уплотняет 1б шласт и/Й1 так увеличивает его удель ный вес, что он превышает величины удельного веса балласта под шпалами в области конечных давлений Р, Pj или Pgr, Р«. Несмотря на высокое конечное давление подбивки Рд, можно обеспечить требуемое положение пути, так как путь фиксируется в номингшьiHOM положении, чем создается упор во время пропорциональной подбивки вы|соким давлением. При дальнейшей обра ботке этого пути конечные давления подбивки Р и Р(, снова уменьшаются до величины конечного давления Р в той области, где путь приближенно находится в нулевом положении. Фиг.5 показывает упрощенную схему блока управления 16 на фиг. 1. Служащий входным звеном цепи управления . измерительный датчик ll соединен с источником напряжения 19,. чтобы соответственно положению датчика относительно системы отсчета 10 выдавать пропорциональное ошибке электричес-кое напряжение или сигнал по проводу 20. Провод 20 соединяет через усилитель и реле 21 измерительный датчик с запоминаняцим блоком 22, который предназначен для запоминания последнего наибольшего отклонения (ошибки) по высоте пути и соединен с клапаном регулировки давления 23 например электрогидравлическим сервоклапаном, который в цепи управления является исполнительным звеном. Клапан регулировки давления 23 расположен в магистрали подачи жидкости под давлением между маслобаком 24 и приводами 7 или 9. Измерительный датчик 11 через провод 20 соединен с поро1свым переключателем 25, чтобы при появлении нулевого сигнала возбуждать электрогидравлический клапан 26, который работает как запорный клапан тгис, чтобы привод 13 путеподъемника 12 мог фиксироваться в нулевом или номинальном положении пути. Переключатель 25 может иметь также второй выход, который связ н с электрогидравлическим клапаг ном 27, работающим в качестве исполнительного звена, который включен в магистраль между насосом 28 для лоде чи гидравлической жидкости под давлением к приводу 13 путеподъемника 12, выполненному в виде гидравлического цилиндра. Работа устройства, с помощью которого может быть реализован предлагаемлй способ, происходит следующим образом. Идущий от измерительного датчика 11 сигнал запоминается в блоке 22 до тех пор, пока при опускании носителя 4 подбивочного инструмента для подбивки шпалы 3 не сработает концевой выключатель 15, который запитывает обмотку реле 21 и прекращает передачу сигнала с измерительного датчика 11 к блоку 22. Последнее запомненное значение, соответствующее местной максимальной ошибке по высоте, через усилитель подводится к клапану регулировки давления 23, который устанавливает давление в магистрали приводов 7 или 9 пропорционально запомненной в накопителе измерен-. ных значений местной максимальной ошибке по высоте. Концевой выключа- ; тель 15 вызывает также притягивание электрогидравлического клапана 2 9, который открывает подвод гидравлической жидкости под давлением от насоса 28 из бака 24 через клапан 23 к приводам 7 или 9. В этом положении выключателя балласт под каждой шпалой уплотняется пропорционально максимальной местной величине подъема,т.е. разности Между заданным и фактическим положениями, и посредством подбивки под давлением поджимается под фиксирунхцим устройством (путеподъемником 12) до тех пор, что получаются зоны уплотнения, пропорциональные положению пути по уровню. Если установленная на втором выходе переключателя 25 величина сигнала не превышается величиной сигнала, поступгиощего от измерительного датчика 11, то подъем пути происходит лишь за счет подбивки шпгш с помощью подбивочного инструкюнта 5 или 8 за счет по.цъема балластом. Если сигнал с измерительного датчика превышает установленную величину сигнала, соответствунйцую, например, ошибке по высоте б мм,электрогидравлический клапан 27 запитывается и осуществляет путем включения привода 13 подъем пути посредством путеподъемника 12 в заданное положение . . - Независимо от величины местной максимальной ошибки по высоте и сигнала измерительного датчика 11 ftepeкл очателем 25 обеспечивается блокировка привода 13 при достижении заданного положения пути, и путь путеподъемником 12 фиксируется в заданном положении. Как только достигается установленное клапаном 23 конечное давление подбивки, носитель подбивочного инструмента поднимается, отключает выключатель 15 с помощью электрогидравлическогр клапана 29, прерывает подачу жидкости под давлением в приводы.. 7 и 9. Далее посредством Одновременкрт о притяжания реле блок 22 снова соединяется с датчиком измерительных значений 11, а во время прод вижения машины к следующей подбиваемой шпале определяется величина ошиб ки по высоте и максимальное ее значе ние для. этой шпаяы и заносится в блок 22. Клапан регулировки давления 23 также может быть включен вцепи управления так,, чтобы обеспечить магистраль подачи жидкости под давлени ем для приводов 7 или 9 обратной связью с блоком 22 или соответствующим сумматором (блоком сравнения). Схема, показанная на фиг. 6, работает следующим образом. Полученные с измерительного датчика 11 местные мг1ксимальные ошибки по высоте через реле 21 подводятся к исполнительному мотору 30, который осуществляет вращение винтового шпинделя и сдвиг сидящей на шпинделе гайки 31 пропорционально соответствующей ошибке по высоте. Гайка 31 служит для управления клапаном регулировки давления 23 через вилку и трос с электрическим датчиком перемещения 32, например поворотным потенциометром. Для правильной установки гайки 31 посред ством мотора 30 датчик перемещения 32 через провод обратной связи соеди нен с элементом сравнения 33 Таким образом, любое положение гайки 31 пропорционально выдаваемому измерительным датчиком 11 сигналу, а при его изменении оно устанавливается мо тором 30. Мотор 30 можно выполнить в виде шагового мотора, тогда показанная в примере выполнения цепь обратной связи может не понадобиться. Выполнение машины не ограничивается данным примером выполнения с од ной группой подбивочных инструментов С помощью машины с двумя группами падбивочного инструмента для одновре менной обработки двух соседних шпал может быть получен равномерный результат при работе. Хотя машины с гидравлическими приводами эффективны для реализации способа по процес су асинхронной подбивки, в машинах можно применять также механический шпиндельный привод. Предлагаемый способ выправки железнодорожного пути и машина для реа лизации этого способа обеспечивают качественную выправку пути в продоль ном профиле независимо от величины подъемки пути. Формула изобретения 1. Способ выправки железнодорожно го пути, заключающийся в том, что поднимают путь на требуемую величину удерживают его в этом положении пос редством фиксирующего устройства и производят уплотнение балласта в зоне пересечения рельсов и шпал посред ством вибрации и давления, передавае мых рабочим органом, до упора каждого участка пути в фиксирующее устрой ство, отличающи, йся тем, что, с целью, повышения качества выправки, давление рабочего органа на балласт устанавливаиот пропорциональным величине подъемки пути на каждом участке. 2. Машина для реализации способа по п. 1, содержащая самоходное шасси, подбивочные ийструменты с вибропричодами и приводами обжатия балласта, смонтированные на раме шасси с возмож,ностью перемещения в вертикальной 1 плоскости приводом и расположенные перпендикулярно и параллельно продольной оси машины, с обеих сторон от нее, установленный на раме шасси вблизи подбивочных инструментов путеподъемник с приводом перестановки его по высоте, а также смонтированные на раме шасси устройство блокировки . привода путеподъемника, гидросистему, блок управления и систему отсчета, включакнцую в -себя измерительные тележки и тросы-хорды, связывающие указанные тележки, датчики положения пути в продольном профиле, связанные с соответствующими тросами-хордами и указанным приводом путе подъемника через устройство его блокировки, причем блок управления электрически связан с системой отсчета, приводом перестановки путеподъемника и приводами обжатия балласта, отличающаяся тем, что она снабжена запоминакяцим блоком, клапаном регулировки давления, электрогидравлическим клапаном и концевым выключателем, причем каждый датчик положения пути в продольном профиле через запоминаияций блок и клапан регулировки давления связан с напорной магистралью гидросистемы, а через концевой выключатель и электрогидравлический клапан - с соответствующими приводами обжатия балласта. 3.Машина по п. 2, отлича ю-- щ а я с я тем, что устройство блокировки привода перестановки путеподъемника по высоте содержит пороговый переключатель, соединенный электрически с датчиком положения пути, в продольном профиле и запорный клaпaJ;, связанный с указанным приводом путеподъемника. 4.Машина по пп. 2иЗ, отлич а.ю щ а я сЯ тем, что запоминаю-щий блок соединен с клапаном регулировки давления и сЪдержит элемент сравнения, датчик перемещения и мотор, включенный между элементом сравнения и указанным датчиком перемещения. Источники информации, принятые во внимание при экспертизе 1.Домбровский Н.Г. и др. Строительные и путевые машины. М., Транспорт, 1967, с. 384-386 (прототип). 2.Патент СССР по заявке №2004028/ кл. Е 01 В 27/17, 26.04.73, 14.01.74 (приоритет) .


| название | год | авторы | номер документа |
|---|---|---|---|
| Шпалоподбивочная машина | 1974 |
|
SU728725A3 |
| СПОСОБ ПОДБИВКИ ШПАЛ ЖЕЛЕЗНОДОРОЖНОГО ПУТИ | 2013 |
|
RU2534163C1 |
| СПОСОБ ПОДБИВКИ ШПАЛ ЖЕЛЕЗНОДОРОЖНОГО ПУТИ | 2008 |
|
RU2372440C1 |
| СПОСОБ ПОДБИВКИ ШПАЛ ЖЕЛЕЗНОДОРОЖНОГО ПУТИ И МАШИНА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2011 |
|
RU2468136C1 |
| СПОСОБ АВТОМАТИЧЕСКОЙ КОРРЕКТИРОВКИ ПОЛОЖЕНИЯ РЕЛЬСОВОГО ПУТИ | 2019 |
|
RU2757104C1 |
| СПОСОБ ПОДБИВКИ ШПАЛ ЖЕЛЕЗНОДОРОЖНОГО ПУТИ | 2011 |
|
RU2471912C2 |
| СПОСОБ ВЫПРАВКИ ПУТИ | 2007 |
|
RU2385978C2 |
| СПОСОБ ПОДБИВКИ И СТАБИЛИЗАЦИИ РЕЛЬСОВОГО ПУТИ, ШПАЛОПОДБИВОЧНАЯ МАШИНА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2007 |
|
RU2378444C2 |
| СПОСОБ ПОДБИВКИ СТРЕЛОЧНОГО ПЕРЕВОДА НА ПЛИТНОМ ОСНОВАНИИ | 2021 |
|
RU2789281C1 |
| Шпалоподбивочная машина | 1980 |
|
SU965364A3 |