(54) САМОХОДНОЕ ШАССИ
| название | год | авторы | номер документа |
|---|---|---|---|
| Самоходное шасси | 1979 |
|
SU872359A2 |
| САМОХОДНОЕ ТРАНСПОРТНОЕ УСТРОЙСТВО ДЛЯ ПЕРЕДВИЖЕНИЯ ПО СНЕГУ | 1993 |
|
RU2073620C1 |
| ВЫДВИЖНАЯ РОТОРНАЯ ДВИЖИТЕЛЬНО-РУЛЕВАЯ КОЛОНКА | 2005 |
|
RU2282559C1 |
| СИСТЕМА УПРАВЛЕНИЯ ЗЕМЛЕРОЙНО-ТРАНСПОРТНОЙ МАШИНЫ | 2013 |
|
RU2526437C1 |
| САМОЛЕТ В.С.ГРИГОРЧУКА | 1997 |
|
RU2123960C1 |
| САМОХОДНОЕ КРЕСЛО ДЛЯ ИНВАЛИДОВ | 1991 |
|
RU2033125C1 |
| ГИДРОМАНИПУЛЯТОР МОБИЛЬНОГО РОБОТА | 2022 |
|
RU2773065C1 |
| МАШИНА ДЛЯ ВСКРЫТИЯ ТРУБОПРОВОДА И РАБОЧИЙ ОРГАН | 1997 |
|
RU2112841C1 |
| СПОСОБ УПРАВЛЕНИЯ ПОВОРОТОМ НАЗЕМНОГО ТРАНСПОРТНОГО СРЕДСТВА И САМОХОДНЫЙ МИННЫЙ РАЗГРАДИТЕЛЬ | 2012 |
|
RU2511269C1 |
| УПРАВЛЯЕМЫЕ САНИ ДЛЯ НАТУРБАНА | 1991 |
|
RU2051056C1 |

I
Изобретение относится к самоходным транспортным средствам.
По основному авт. св. № 759383известно самоходное шасси с двумя поворотными мостами и неподвижно укрепленными на концах каждого из них мотор-колесами. Один из мостов, крсже того, выполнен с возможностью свободного поворота вокруг продольной горизонтальной оси. Маневрирование шасси осуществляется за счет управляемых поворотов мостов, производимых рассогласованием частот вращения мотор-колес. Управление шасси осуществляется с помощью органа упра1|ления, содержащего задатчики прямолинейного движения, угла поворота мостов и радиуса поворота шасси 13 .
Наличие трех раздельно управляемых задатчиков усложняет управление шасси, так как одновременные операции по вращению их роторов затрудне.ны. Неодновременность вращения роторов задатчиков может привести к су2
щественным ошибкам по заданию режима движения шасси, а в некоторых случаях и к невозможности проведения четкого маневрирования.
Цель изобретения - улучшение эксплуатационных характе1 {стик васси.
Поставленная цель достигается тем, что в самоходион васси орган управления включает в себя две жестко связанные взаимно перпендикулярные оси, при этом роторы эадатчиков радиуса поворота аасси fi угла поворота мостов соединены с продольной горизонтальной осью, корпуса задатчиков неподвижно скреплены с корпусом шасси, ротор эадатчика прямолинейного движения связан с 1юперечной осью, а корпус задатчика соединен с ручкой управления самоходного шасси.
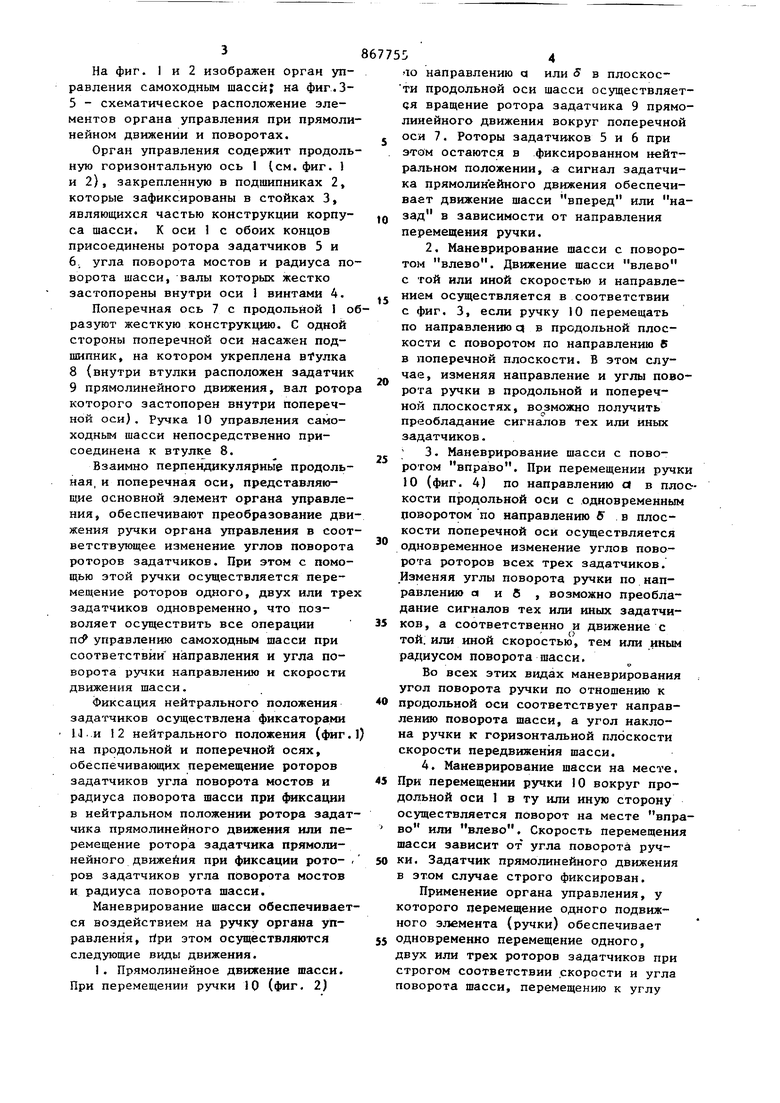
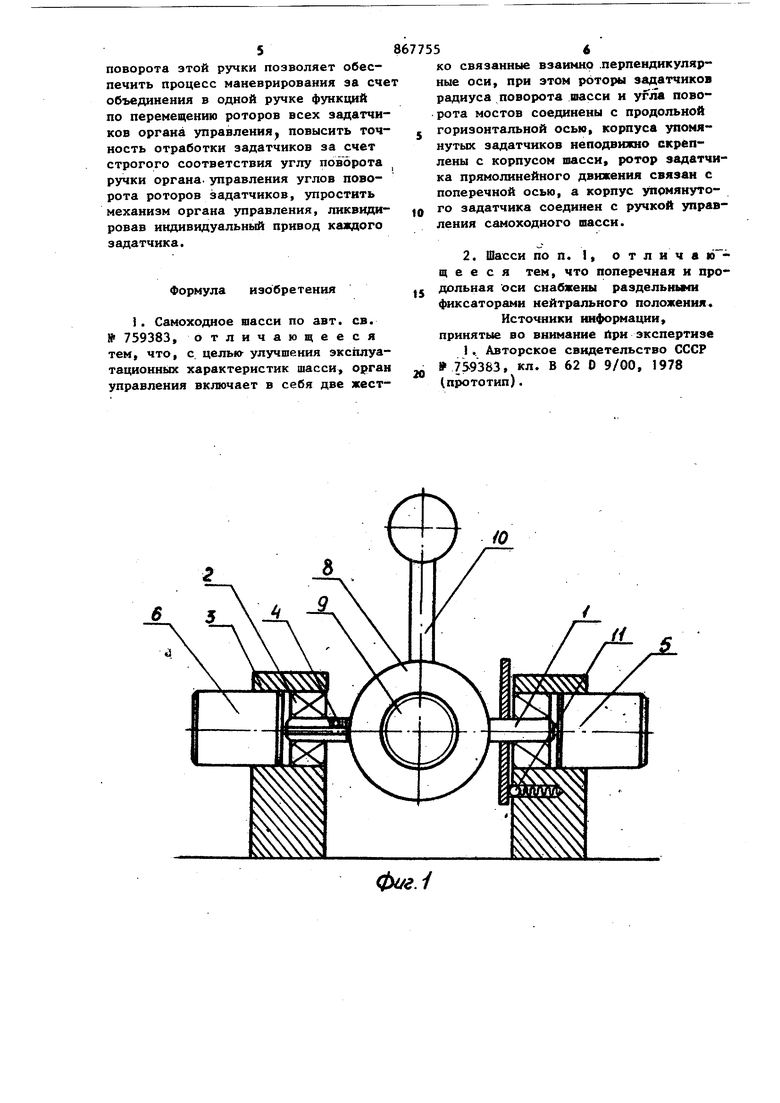
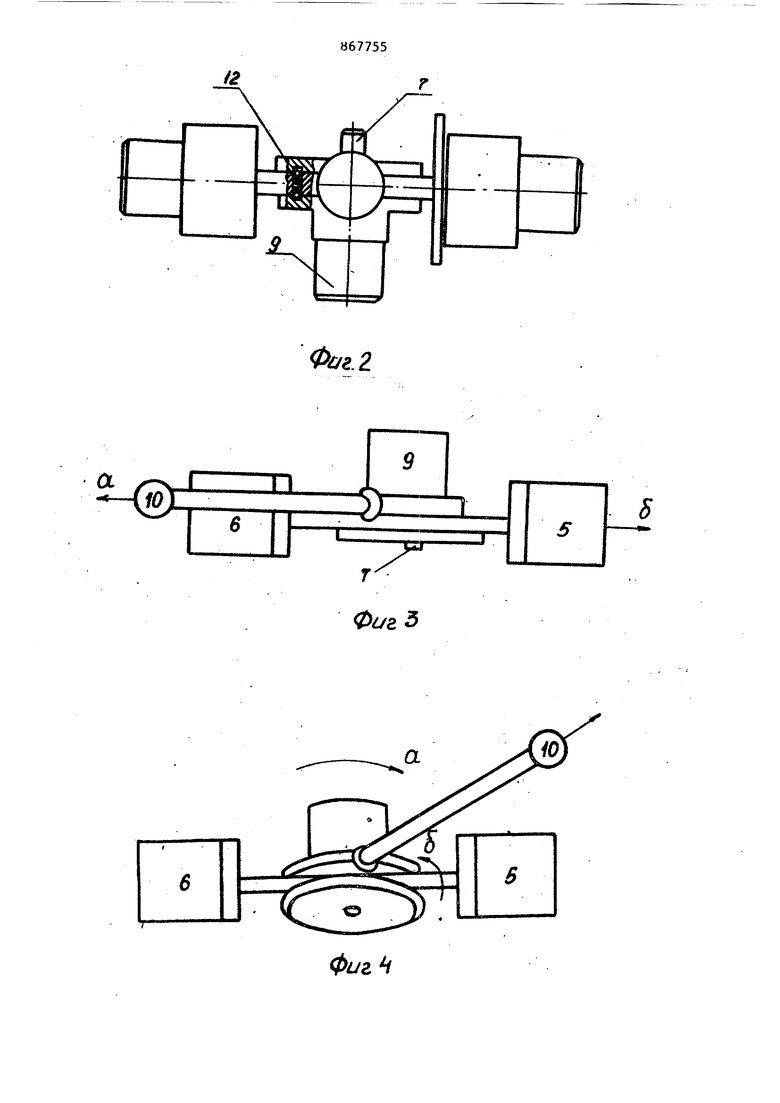
Кроме того, поперечная и продольная оси снабжены раздельньми фиксатоjpaMH нейтрального положеиия. 5 На фиг. 1 и 2 изображен орган управления самоходным шасси на фиг.35 - схематическое расположение элементов органа управления при прямоли нейном движении и поворотах. Орган управления содержит продоль ную горизонтальную ось 1 см, фиг. 1 и 2), закрепленную в подшипниках 2 которые зафиксированы в стойках 3, являющихся частью конструкции корпуса шасси. К оси 1 с обоих концов присоединены ротора задатчиков 5 и 6. угла поворота мостов и радиуса по ворота шасси, валы которых жестко застопорены внутри оси I винтами 4. Поперечная ось 7 с продольной i о разуют жесткую конструкцию. С одной стороны поперечной оси насажен подшипник, на котором укреплена втулка 8(внутри втулки расположен задатчик 9прямолинейного движения, вал ротор которого застопорен внутри поперечной оси). Ручка 10 управления самоходным шасси непосредственно присоединена к втулке 8. Взаимно перпендикулярные продольная, и поперечная оси, представляю- 1цие основной элемент органа управления, обеспечивают преобразование дви жения ручки органа управления в соот ветствующее изменение углов поворота роторов задатчиков. При этом с помощью этой ручки осуществляется перемещение роторов одного, двух или тре задатчиков одновременно, что позволяет осуществить все операции ПС управлению самоходным шасси при соответствии направления и угла поворота ручки направлению и скорости движения шасси. Фиксация нейтрального положения задатчиков осуществлена фиксаторами U и 12 нейтрального положения (фиг на продольной и поперечной осях, обеспечиванмдих перемещение роторов задатчиков угла поворота мостов и радиуса поворота шасси при фиксации в нейтральном положении ротора зада чика прямолинейного движения или перемещение ротора задатчика прямолинейного движейия при фиксации роторов задатчиков угла поворота мостов и радиуса поворота шассн. Маневрирование шасси обеспечивае ся воздействием на ручку органа управления, rtpH этом осуществляются следующие виды движения. I. Прямолинейное движение шасси. При перемещении ручки Ю (фиг. 2) 5 ао направлению а или S в плоскости продольной оси шасси осуществляется вращение ротора задатчика 9 прямолинейного движения вокруг поперечной оси 7. Роторы задатчнков 5 и 6 при этом остаются в фиксированном нейтральном положении, а сигнал задатчика прямолинейного движения обеспечивает движение шасси вперед или назад в зависимости от направления перемещения ручки. 2.Маневрирование шасси с поворотом влево. Движение шасси влево с той или иной скоростью и направлением осуществляется в соответствии с фиг. 3, если ручку 10 перемещать по направлению с| в продольной плоскости с поворотом по направлению 6 в поперечной плоскости. В этом случае, изменяя направление и углы поворота ручки в продольной и поперечной плоскостях, возможно получить преобладание сигналов тех или иных задатчиков. 3.Маневрирование шасси с поворотом вправо. При перемещении ручки 10 (фиг. 4) по направлению а в плоскости продольной оси с одновременным поворотом по направлению 5 в плоскости поперечной оси осуществляется одновременное изменение углов поворота роторов всех трех задатчиков. Изменяя углы поворота ручки по направлению а и б , возможно преобладание сигналов тех или иных задатчиков, а соответственно и движение с той. или иной скоростью, тем или иным радиусом поворота шасси. Во всех этих видах маневрирования угол поворота ручки по отношению к продольной оси соответствует направлению поворота шасси, а угол наклона ручки к горизонтальной плоскости скорости передвижения шасси. 4. Маневрирование шасси на месте. При перемещении ручки 10 вокруг продольной оси 1 в ту или иную сторону осуществляется поворот на месте во или влево. Скорость перемещения шасси зависит от угла поворота ручки. Задатчик прямолинейного движения в этом случае строго фиксирован. Применение органа управления, у которого перемещение одного подвижного элемента (ручки) обеспечивает одновременно перемещение одного, двух или трех роторов задатчиков при строгом соответствии скорости и угла поворота шасси, перемещению к углу 5 поворота этой ручки позволяет обеспечить процесс маневрирования за сче объединения в одной ручке функций по перемещению роторов всех задатчиков органа управления повысить точность отработки задатчиков за счет строгого соответствия углу поворота ручки органа, управления углов поворота роторов задатчиков, упростить механизм органа управления, ликвидировав индивидуальный привод каждого задатчика.
Формула изобретения
. Самоходное шасси по авт. св. 759383, отличающееся тем, что, с. цель улучшения эксплуатационных характеристик шасси, орган управления включает в себя две жест2. Шасси по п. 1, отличающееся тем, что поперечная и про дольная оси снабжены раздельньми фиксаторами нейтрального положения.
Источники информации, принятые во внимание йри экспертизе
.. Авторское свидетельство СССР 7S9383, кл. В 62 О 9/00, 1978 (прототип). 5 связанные взаимно .перпендикулярконые оси, при этом роторы задатчиков радиуса поворота шасси и угла поворота мостов соединены с продольной горизонтальной осью, корпуса упомянутых задатчиков неподвижно скреплены с корпусом шасси, ротор задатчика прямолинейного движеиия связан с поперечной осью, а корпус упомянутого задатчика соединен с ручкой управления самоходного шасси.
(.i
Фа г. 2
а /сч I 11
J
Фиг 3
фиг
а
фиг 5
