Изобретение относится к машиностроению, в частности к сборочному оборудованию, предназначенному для перемещения изделий как в непрерывном, так и в прерывистом режимах.
Известен привод шагового конвейера, содержащий жестко закрепленные на валу исполнительный орган и храпоьое колесо, контактирующую с последним подпружиненную собачку, шарнирно установленную на водиле и связанный с последним передачей рейка - шестерня силовой гидроцилиндр. Получение большого шага транспортирования таким приводом затруднительно, поскольку, как следует из описания, это достигается изменением диаметра ведущих звездочек, что не всегда возможно для получения большого шага конструктивно. Увеличение хода силового цилиндра ведет к увеличению его диаметра по технологическим соображениям. Кроме того, привод не обеспечивает возможности непрерывного перемещения транспортируемого газа на п шагов.
Известен привод цепного шагового конвейера, содержащий установленный на раме силовой цилиндр двустороннего действия с толкателем на штоке, взаимодействующим повторными упорами с цепью, обеспечивающий заданный шаг конVJ XI 00
О N 00
вейера при различном шаге цепи за счет установки упоров толкателя с шагом S, определяемым по формуле S - t -i(T - т).
В описанной конструкции перемещение цепей конвейера на полный шаг осуществляется силовым цилиндром, обеспечивающим точность перемещения, но непригодным для получения большого шага перемещения.
Целью изобретения является расширение технологических возможностей привода путем обеспечения.больших шагов перемещения и высокой точности останова тягового органа.
Это достигается тем, что в приводе шаговых перемещений, содержащем установленные на валах поворотные элементы, огибающий последние бесконечно замкнутый гибкий тяговый орган с расположенными на нем с шагом упорам,и, установленный с возможностью возвратно;поступательно- го перемещения вдоль тягового органа и взаимодействия с упорами толкателя одностороннего действия, силовой цилиндр, шток которого связан с толкателем односто- роннего действия и храповый механизм, храповое колесо которог-с жестко закреплено на одном из валов, тяговый орган снабжен приводом вращения одного из поворотных элементов и концевым выключателем останова привода вращения, установленнымсвозможностьювзаимодействия с упорами.
Привод вращения одного из поворотных элементов выполнен с цепной передачей, ведомая звездочка которой установлена на валу этого поворотного элемента с возможностью вращения, а собачка храпового механизма установлена на ведомой звездочке цепной передачи.
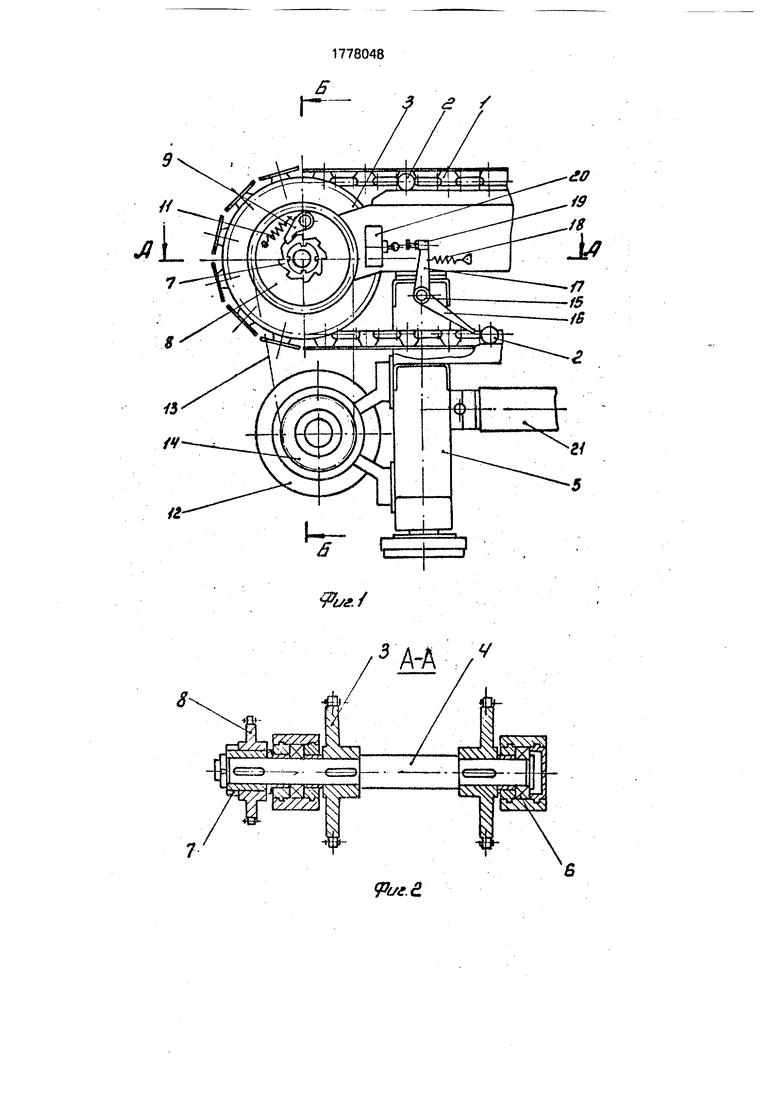
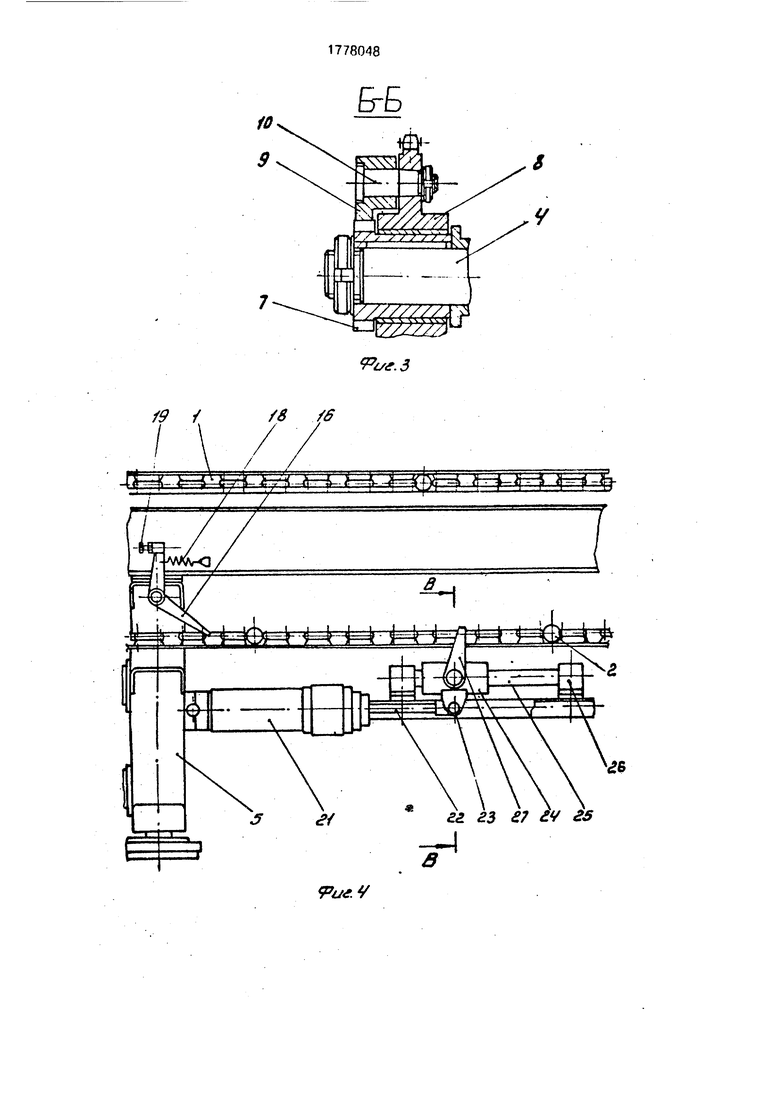
На фиг. 1 показан привод шаговых перемещений, вид сбоку; на фиг. 2 - разрез А-А на фиг. 1; на фиг. 3 - разрез Б-Б на фиг, 1: на фиг. 4 - привод; на фиг. 5 - разрез В-В на фиг. 4.
Привод шаговых перемещений содержит гибкий тяговый орган 1, снабженный упорами 2, выполненными в виде роликов, расстояние между которыми соответствует шагу перемещения тягового органа 1, поворотные элементы 3, выполненные в виде звездочек на приводном 4 и натяжном (на чертеже не показан) валах. Приводной вал 4 смонтирован на раме 5 на опорах качения 6. На консоли приводного вала 4 жестко закреплено колесо 7 храпового механизма, на ступице которого установлена с возможностью вращения звездочка 8. Собачка 9 храпового механизма установлена с возможностью вращения на пальце 10. жестко закрепленном на диске звездочки 8, и снабжена оттяжной пружиной 11. Привод вала 4 осуществляется мотор-редуктором 12 погредством цепной передачи 13, ведущая
звездочка 14 которой жестко закреплена на валу мотор-редуктор 12. На раме 5 смонтирован с возможностью поворота относительно пальца 15 двуплечий рычаг, плечо 16 которого взаимодействует с упором при его
0 движении, а плечо 17. снабженное оттяжной пружиной 18, посредством упора 19 взаимодействует при повороте двуплечего рычага с концевым выключателем 20 останова мотор-редуктора 12.
5На раме 5 смонтирован, кроме того, дополнительный привод тягового органа 1, выполненный в виде силового цилиндра 21, корпус которого шарнирно закреплен, а шток 22, посредством пальца 23 соединен0 кого с кареткой 24. установленной на раме 5 на направляющей 25 в опорах 26. Толкатели 27 каретки 24 взаимодействуют при ее перемещении с упорами 2 тягового органа 1 Торцевая часть ступицы толкателя 27 име5 ет паз, обеспечивающий возможность огра- ниченного поворота толкателя 27 относительно цапф каретки под действием упора 2 при его движении относительно каретки и обратно, под действием пружины
0 кручения 28, один конец которой соединен с толкателем 27, а другой - с втулкой 29 каретки 24. Ограничение поворота толкателя 27 осуществляется штифтом 30. Каретка 24 снабжена линейкой.взаимрдействующей
5 с концевыми выключателями в ее предельных положениях.
Привод работает следующим образом. Включение мотор-редуктора 12 осуществляется импульсом от внешнего источни0 ка. Мотор-редуктор 12 посредством цепной передачи 13, собачки 9 и храпового колеса 7 вращает приводной вал 4. Движущийся упор 2, взаимодействуя с толкателем 27 каретки 24, отклоняет его и, пропустив упор 2,
5 под действием закрученной пружины 28 толкатель 27 возвращается в исходное положение. Плечо 16 двуплечего рычага под воздействием одного из последних упоров 2 отклоняется, при этом плечом 17 посредст0 вом упора 19 воздействует на конечный выключатель 20 останова мотор-редуктора 12. После прохода упора 2 под плечом 16 рычага возврат его в исходное положение осуществляется пружиной 18. Установка конечного
5 выключателя 20 и взаимодействующего с ним рычага выполнена так, что обеспечивает перемещение тягового органа 1 с учетом вращения мотор-редуктора 12 после отключения на расстояние, близкое к шагу передвижения, но меньше его. Для обеспечения
перемещения тягового органа 1 на величину шага одновременно с отключением мотор- редуктора 12 производится включение силового цилиндра 21. При этом шток 22 совместно с кареткой 24, перемещаясь, до- гоняет упор 2, прошедший над толкателем 27, захватывает движущийся с замедлением упор 2 толкателем 27, перемещая таким образом тяговый орган 1 в пределах хода силового цилиндра 21 при неподвижной звездочке 8 цепной передачи 13. Точность останова обеспечивается силовым цилиндром 21 при скоростях и нагрузках тягового органа 1, исключающих его движение по инерции. Последующий пуск мотор-редуктор 12 осуществляется при исходном положении силового цилиндра. После отключения мотор-редуктора 12 при перемещении тягового органа 1 силовым цилиндром 21 между зубом храпового колеса 7 и собачкой 9 образуется зазор, который выбирается при последующем пуске мотор-редуктора 12. При этом запаздывание начала движения тягового органа 1 будет равно времени, необходимому для выбора зазора.
Концевые выключатели,взаимодействующие с линейкой каретки 24,обеспечивают выдачу электрического сигнала соответственно положению штока силового цилиндра, используемого для блокировок и управления. Блокируя электрический сигнал концевого выключателя 20, устройство позволяет получать прерывистые перемещения тягового органа 1, кратные шагу или режим непрерывного движения. Изменение величины шага осуществляется перестановкой упоров 2.
Предлагаемая конструкция привода шаговых перемещений позволяет осуществлять большие перемещения с высокой точностью останова тягового органа при сравнительно простом способе изменения шага. В качестве силового цилиндра может ис- пользоваться гидропневматический привод, что позволяет получать значительные усилия для перемещения тягового органа. Формула изобретения
1.Привод шаговых перемещений, со- держащий установленные на валах поворотные элементы, огибающий последние бесконечно замкнутый гибкий тяговый орган с расположенными на нем с шагом упорами, установленный с возможностью
возвратно-поступательного перемещения вдоль тягового органа и взаимодействия с упорами толкатель одностороннего действия, силовой цилиндр, шток которого связан с толкателем одностороннего действия, и
храповый механизм, храповое колесо которого жестко закреплено на одном из валов, отличающийся тем, что, с целью расширения технологических возможностей привода шаговых перемещений путем
обеспечения больших шагов перемещения и высокой точности останова тягового органа, он снабжен приводом вращения одного из поворотных элементов и концевым выключателем останова привода вращения,
установленным с возможностью взаимодействия с упорами.
2.Привод по п. 1,отличающийся тем, что привод вращения одного и поворотных элементов выполнен с цепной передачей, ведомая звездочка которой установлена на валу этого поворотного элемента с возможностью вращения, а собачка храпового механизма установлена на ведомой звездочке цепной передачи.
/г
Ј /
| название | год | авторы | номер документа |
|---|---|---|---|
| Шаговый конвейер | 1990 |
|
SU1720955A1 |
| Установка для контактной сварки | 1978 |
|
SU764893A1 |
| Устройство для установки труб в трубные решетки теплообменников | 1983 |
|
SU1186452A1 |
| Устройство для приема и выдачи штанг на буровом станке | 1974 |
|
SU485217A1 |
| Привод шагового конвейера | 1983 |
|
SU1093646A1 |
| ВЕРТИКАЛЬНЫЙ КОВШОВЫЙ ЭЛЕВАТОР | 1992 |
|
RU2044683C1 |
| Устройство для подачи длинномерного материала в зону обработки | 1983 |
|
SU1199376A1 |
| Механизм передачи крутящего момента | 1980 |
|
SU998194A1 |
| Автомат для изготовления охлаждающих пластин и сборки секции ребристых радиаторов | 1983 |
|
SU1207591A1 |
| Устройство для поворота грузовых подвесок конвейера | 1983 |
|
SU1155535A1 |

Использование: изобретение относится к машиностроению, в частности к сборочному оборудованию, предназначенному для перемещения изделий как в непрерывном, так и в прерывистых режимах. Сущность изобретения: привод шаговых перемещений содержит установленные на валах поворотные элементы, огибающий последние бесконечно замкнутый гибкий тяговый орган с расположенными на нем с шагом упорами, установленный с возможностью возвратно-поступательного перемещения вдоль тягового органа и взаимодействия с упорами толкатель одностороннего действия, силовой цилиндр, шток которого связан с толкателем одностороннего действия и храповый механизм, храповое колесо которого жестко закреплено на валу; тяговый орган снабжен приводом вращения одного из поворотных элементов и концевым выключателем останова привода вращения, установленным с возможностью взаимодействия с упорами. Привод вращения одного из поворотных элементов выполнен с цепной передачей, ведомая звездочка которой установлена на валу этого поворотного элемента с возможностью вращения, а собачка храпового механизма установлена на ведомой звездочке цепной передачи. Преимуществом привода шаговых перемещений является возможность осуществления больших перемещений с высокой точностью останова тягового органа при сравнительно простом способе изменения шага. 1 з.п. ф- лы, 5 ил.
Фил/
А-А
Фю.е.
$г л & ег
ff/ 9/
t &
| Привод цепного шагового конвейера | 1983 |
|
SU1168488A1 |
| Разборное приспособление для накатки на рельсы сошедших с них колес подвижного состава | 1920 |
|
SU65A1 |
