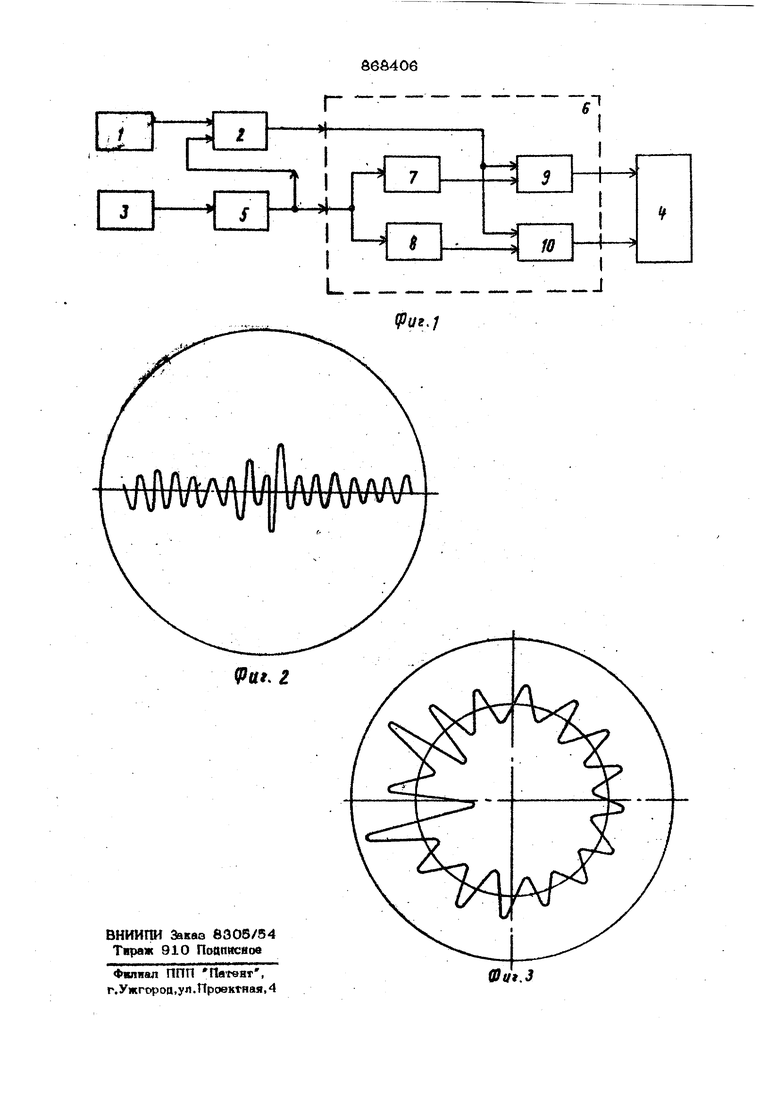
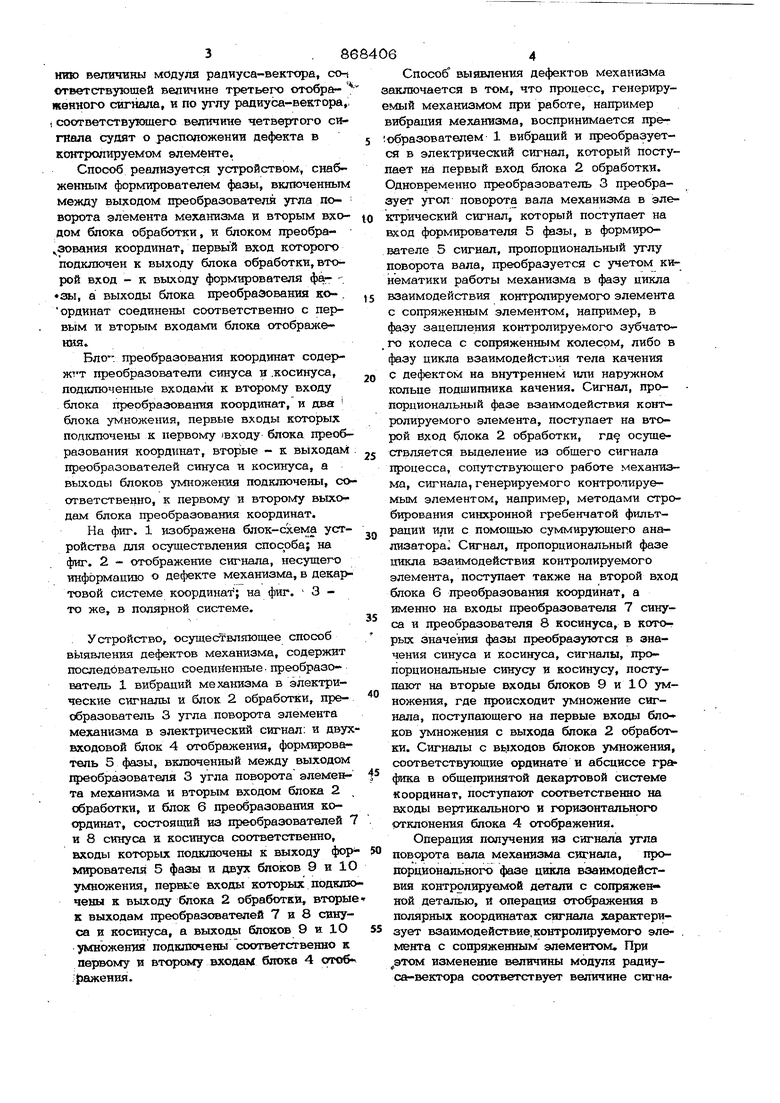
(54) СПОСОБ ВЫЯВЛЕНИЯ ДЕФЕКТОВ МЕХАНИЗМА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ Изобретение относится к виброизмери тельной технике и диагностике механизмов и может быть использовано для контроля диагностики зубчатых, фрикционных цепных передач и подшипников качения. Наиболее близким по технической сущности к предлагаемому является способ выявления дефектов .механизма, заключающийся в том, что преобразуют колебания, сопутствующие работе механизма, в первый электрический сигнал, преобразуют угол поворота элемента механизма во вто рой электрический сигнал, обрабатывают первый электрический сигнал и выделяют из него третий электрический сигнал, характеризующий колебания, обусловленные взаимодействием контролируемого элемента с сопряженными с ним элементами, и используют для выявления дефекта электрические сигналы путем их отображения. Способ осуществляют при помощи устройства , содержащего последовательно сх единенные преобразователь вибраций м&ханизма в электрические сигналы н блок обработки, преобразователь угла поворота элемента механизма в электрический сиг нал и двухвходовый блок отображения 1, Недостатком указанного способа и yc ройства его осуществляющего является то, что получаемое изображение, характ& ризующее дефекты контролируемого элемента механизма, не соответствует его форме (шестерне, подщипнику). Несоответствие между размерностью координаты дефекта и его изображением вызьгоает неудобство при восприятии информации ъ снижает оперативность обнаруясения дефекта на контролируемом элементе. Цель изобретения - повьпиение оперативности контроля. Указанная цель достигается тем, что из вторюго электрического сигнала выделяют четвертый электрический сигнал, соответствующий фазе цикла взаимодействие контролируемого элемента с сопряженными с ним элементами механизма,отображают третий и четвертый электрические сигналы в полярных координатах, и по иэмен нтао величины модуля радиуса-вектора, оси ответствуюгаей величине третьего отображенного сигнала, и по углу радиуса-вектора, i соответствующего величине четвертого сигвала судят о расположении дефекта в контролируемом элементе. Способ реализуется устройством, снабженным формирователем фазы, включенным между выходом преобразователя угла поворота элемента механизма и вторым входом блока обработки, и блоком преобра зования координат, первый вход которого подключен к выходу блока обработки, второй вход - к вьтходу формирователя фа- зы, а выходы блока преобразования ко- , ординат соединены соответственно с первым и вторым входами блока отображения. Бло. преобразования координат содержтт преобразователи синуса и .косинуса, под1шюченные входами к второму входу блока преобразования координат, и два блока умножения, первые входы которых подюпочены к первому шходу блока преобразования координат, вторые - к выходам преобразователей синуса и косинуса, а выходы блоков умножения подключены, со ответственно, к первому и второму выходам блока преобразования координат. На фиг. 1 изображена блок-схема устройства для осуществления способа; на фиг. 2 - отображение сигнала, несущего информацию о дефекте механизма, в декартовой системе координат; на фиг. 3 то же, в полярной системе. Устройство, осуществляйощее способ выявления дефектов механизма, содержит последовательно соединенные. преобразователь 1 вибрапий механизма в электрические сигналы и блок 2 обработки, преобразователь 3 угла поворота элемента механизма в электрический сигнал: и двух входовой блок 4 отображения, формирователь 5 фазы, включенный между выходом преобразователя 3 угла поворота элемента и вторым входом блока 2 обработки, и блок 6 преобразования координат, состоящий из преобразователей 7 и 8 синуса и косинуса соответственно, входы которых подключены к выходу фор мирователя 5 фазы и двух блоков 9 и 10 умножения, первые входы которых подклю чены к выходу блока 2 обработки, вторые к выходам преобразователей 7 и 8 синуса и косинуса, а выходы блоков 9 и 10 умножеиган подключены соответственно к первому и второму входам блока 4 orrofr {)аженш1. 8 64 Способ выявления дефектов механизма аключается в том, что процесс, генерирумый механизмом при работе, например вибрация механизма, воспринимается преобразователем 1 вибраций и преобразуется в электрический сигнал, который поступает на первый вход блока 2 обработки. Одновременно преобразователь 3 нреобразует угол поворота вала механизма в электрический сигнал, который поступает на вход формирователя 5 фазы, в формирователе 5 сигнал, пропорциональный углу поворота вала, гфеобразуется с учетом кинематики работы механизма в фазу цикла взаимодействия контролируемого элемента с сопряженным элементом, например, в фазу зацепления контролируемого зубчатого колеса с сопряженным колесом, либо в фазу цикла взаимодейстиия тела качения с дефектом на внутреннем или наружном кольце подшипника качения. Сигнал, пропорциональный фазе взаимодействия контролируемого элемента, поступает на второй вход блока 2 обработки, гд осуществляется выделение из общего сигнала процесса, сопутствующего работе механизма, сигнала,генерируемого контролируемым элементом, например, методами стробирования синхронной гребенчатой фильтраций или с помощью суммирующего анализатора Сигнал, пропорциональный фазе цикла взаимодействия контролируемого элемента, поступает также на второй вход блока 6 преобразования координат, а именно на входы преобразователя 7 синуса и преобразователя 8 косинуса, в которых значения фазы преобразуются в значения синуса и косинуса, сигналы, пропорциональные синусу и косинусу, поступают на вторые входы блоков 9 и 1О умножения, где происходит умножение сигнала, поступающего на первые входы бло ков умножения с выхода блока 2 обработки. Сигналы с в ::1ходов блоков умножения, соответствующие ординате и абсциссе графика в общепринятой декартовой системе координат, поступают соответственно на входы вертикального в горизонтального отклонения блока 4 отображения. Операция получения из сигнала угла поворота вала механизма сигнала, пропорционального фазе цшсла взаимодействия контролируемой детали с сопряжен ной деталью, и операция отображения в полярных координатах сигнала характеризует взаимодействие, контролируемого эле- . мента с сопряженным элементом. При атом изменение величины модуля радиуса-вектора соответствует величине сигнапа и характеризует взатамодействие контролируемого элемента, а угол радиуса: вектора соответствует значеншо фазы вза .имодейЬтвия контролируемого элемента с сопряженной деталью. Формирователь фазы и преобразователь координат позволяет по высить удобство восприятия информации о дефектах механизмов и оперативность при поиске дефекта непосредственно на контро лируемом элементе. Это достигается тем что изображение сигнала о дефектах приI ведено в соответствие с формой t контроли руемого элемента и пространственное рас положение дефекта на нем ссжпадает с расположением участков сигнала большой интенсивности. На фиг. 2 представлены изображения сигнала кинематической погрешности зубчатого колеса (2 16) в цекартовой и полярной системах координат. На этих сравнительных изображениях видно, что кроме указанного положительного эффекта при изображении в пойярных координатах увеличивается коэффициент использования экрана блока отображения и увеличивается разрешающая способность по углу. Формул а из о б р е т е-н и я 1, Способ выявления дефектов механизма, заключающийся в том, что преобразуют колебания, сопутствующие работе механизма, в первый электрический сигнал щ еобразуют угол поворота элемента механизма во второй электрический сигнал, обрабатывают первый электрический сигнал и выделяют из него третий электрический сигнал, характеризуюший колеба|ния обусловленные взаимодействием контролируемого элемента с сопряженными с ним элементами, и используют для выяв вления дефекта электрические сигналы путем их отображения, отличающийся тем, что, с целью повышения оперативности контроля, из второго электрического сигнала выделяют четвертый электрический сигнал, .-соответствующий фазе цикла взаимодействия контролируемого элемента с Сопряженными с ним эпементами механизма, отображают третий и четвертый электрические сигналы в полярных координатах, и по изменению величины модуля радиуса-вектора, соответствующего величине третьего отображенного сигнала, и по углу радиуса-вектора соот:ветствующего величине четвертого сигна:Ла судят о расположении дефекта в контролируемом элементе. 2.Устройство для осуществления способа По п. 1, содержащее последовательно соединенные преобразователь вибраций механизма в электрические сигналы и блок обработки, преобразователь угла поворота элементе механизма в электрический сигнал в двухвходовой блок отображения, о тличающееся тем, что, с целью повышения оперативности контроля, оно снабжено формирователем фазы, включен-гным между выходом преобразователя угла поворота элемента механизма и вторым входом блока обработки, и блоком преобразования координат, первый вход КО7 торого подключен к выходу блока обработки, второй вход - к выходу формирователя фазы, а выходы блока преобразователя координат соединены соответственно с первым и вторым входами блока отображения. 3.Устройство по п. 2, о т л и ч а ю щ е е с я тем, что блок преобразования координат содержит преобразователи синуса и косинуса, .подключенные входами ко второму входу блока преобразования коор динат, и два блока умножения, первые входы которых подключены к первому входу блока преобразования координат, вторые к выходам преобразователей синуса и косинуса, а выходы блоков умножения подключены соответственно к первому и второму выходам блока преобразования координат. Источники информации, принятые во внимание при экспертизе 1, Патент Великобритании 1212897, кл. G О1 И 1/ОО, 197О (прототип).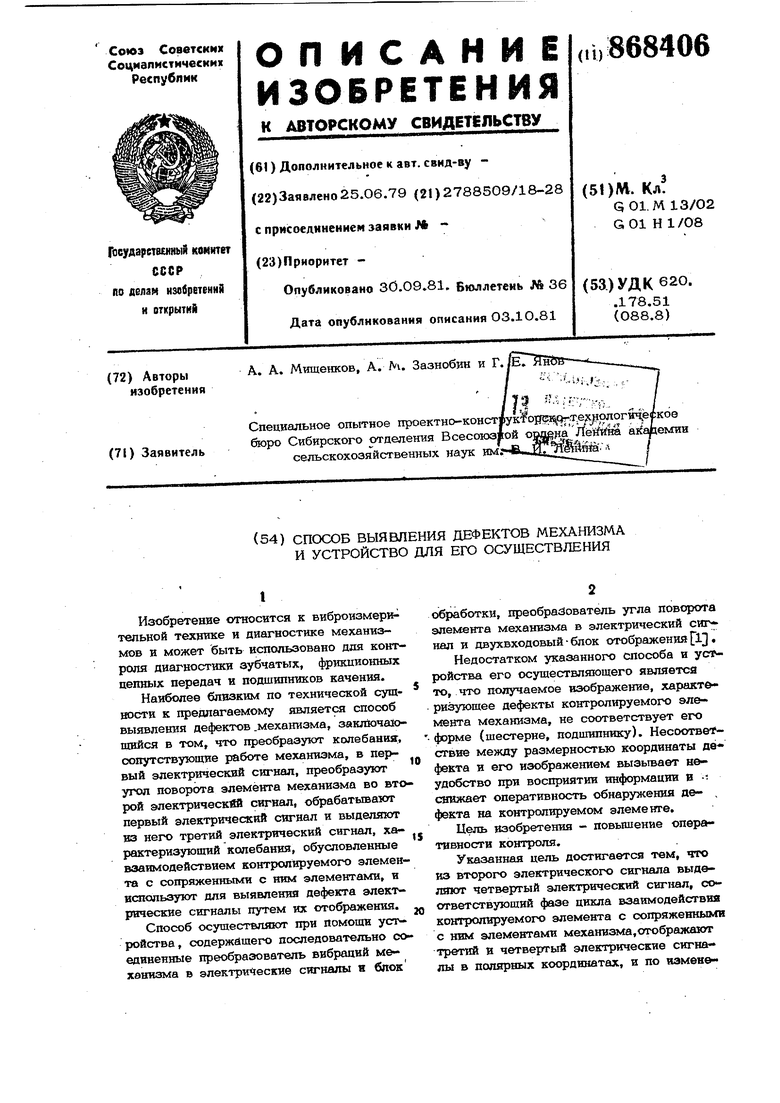
| название | год | авторы | номер документа |
|---|---|---|---|
| Частотно-регулируемый электропривод | 1989 |
|
SU1798884A1 |
| БЫСТРОДЕЙСТВУЮЩИЙ МНОГОФУНКЦИОНАЛЬНЫЙ ПРЕОБРАЗОВАТЕЛЬ УГЛА В КОД ДЛЯ УСТРОЙСТВ ЭЛЕКТРОМЕХАНОТРОНИКИ | 1994 |
|
RU2094945C1 |
| Устройство для формирования векто-POB HA эКРАНЕ элТ | 1978 |
|
SU807362A1 |
| Устройство для поворота изображе-Ния СиМВОлОВ | 1979 |
|
SU841030A1 |
| Обратимый преобразователь координат | 1982 |
|
SU1035617A1 |
| Устройство для регулирования частоты вращения асинхронного электродвигателя | 1987 |
|
SU1534736A1 |
| Частотно-регулируемый электропривод | 1986 |
|
SU1372579A1 |
| СПОСОБ ФОРМИРОВАНИЯ КОМАНД УПРАВЛЕНИЯ НА РАКЕТЕ, РАКЕТА, ВРАЩАЮЩАЯСЯ ПО УГЛУ КРЕНА, СПОСОБ КОРРЕКЦИИ УГЛА КРЕНА И КОРРЕКТОР УГЛА КРЕНА | 2007 |
|
RU2362108C2 |
| Устройство для отображения радиолокационной информации на экране электронно-лучевой трубки | 1989 |
|
SU1691880A1 |
| Устройство для формирования векторов на экране электронно-лучевой трубки | 1985 |
|
SU1251161A1 |