со vj 1C
ел
;о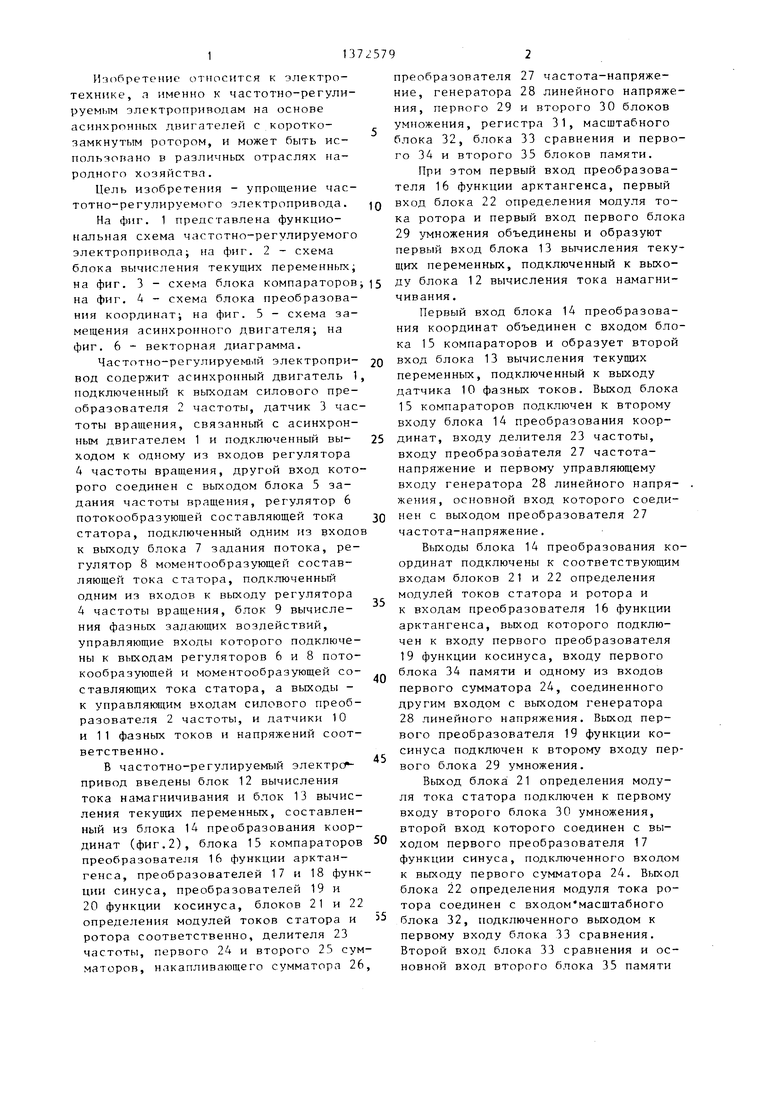
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ УПРАВЛЕНИЯ ЭЛЕКТРОПРИВОДОМ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1991 |
|
RU2020724C1 |
| Электропривод переменного тока | 1984 |
|
SU1515322A1 |
| СИСТЕМА УПРАВЛЕНИЯ МАШИНОЙ ДВОЙНОГО ПИТАНИЯ | 1995 |
|
RU2106055C1 |
| Частотно-регулируемый электропривод | 1986 |
|
SU1453574A1 |
| ЭЛЕКТРОПРИВОД ПЕРЕМЕННОГО ТОКА | 2012 |
|
RU2528612C2 |
| ЭЛЕКТРОПРИВОД ПЕРЕМЕННОГО ТОКА | 2013 |
|
RU2512873C1 |
| Устройство для определения скольжения асинхронного двигателя | 1986 |
|
SU1415399A1 |
| СПОСОБ ВЕКТОРНОЙ ОРИЕНТАЦИИ ТОКА ЭЛЕКТРОМЕХАНИЧЕСКОГО ПРЕОБРАЗОВАТЕЛЯ ЭНЕРГИИ И УСТРОЙСТВО ВЕКТОРНОЙ ОРИЕНТАЦИИ ("ВЕКТОРИНГ") ДЛЯ ОСУЩЕСТВЛЕНИЯ СПОСОБА | 1998 |
|
RU2141720C1 |
| Частотно-управляемый электропривод | 1986 |
|
SU1372581A1 |
| СПОСОБ ВЕКТОРНОГО УПРАВЛЕНИЯ МОМЕНТОМ АСИНХРОННОГО ЭЛЕКТРОДВИГАТЕЛЯ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2010 |
|
RU2459345C2 |
Изобретение относится к электротехнике и может быть использовано в различных отраслях народного хозяйства. Целью изобретения является упрощение. Указанная цель достигается тем, что в частотно-регулируемый электропривод введены последовательно соединенные блок 12 вычисления тока намагничивания и блок 13 вычисления текущих переменных. Входы блока 12 соединены с датчиками тока и напряжения 10, 11. Второй вход блока 13 соединен с выходом датчика тока 10. Выходы блока 13 подключены соответственно к входам блока 9 вычисления фазных задающих воздействий и с вторыми входами регулятора 6 потока и регулятора 8 моментообразующей составляющей тока статора асинхронного двигателя 1. В результате обеспечивается получение для регуляторов 6, 8 сигналов обратных связей, характеризующих угловое положение вектора потокосцепления ротора относительно оси статора асинхронного двигателя 1 без установки датчиков потока. 6 ил. S (Л
Ф1/2.7
Изобретение относится к электротехнике, л именно к частотно-регулируемым электроприводам на основе асинхронных двигателей с коротко- замкнутым ротором, и может быть использовано в различных отраслях народного хозяйства.
Цель изобретения - упрощение частотно-регулируемого электропривода.
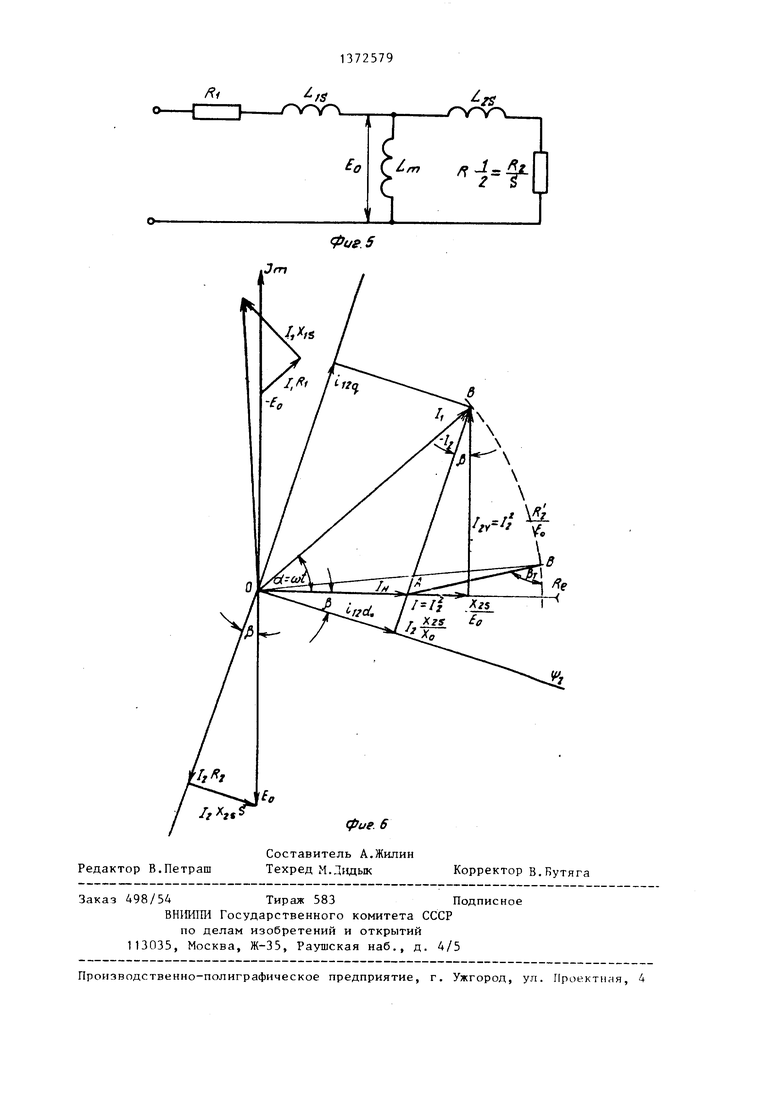
На фиг. 1 представлена функциональная схема частотно-регулируемого электроприводаi на фиг. 2 - схема блока вычисления текущих nepeMeHHbixj на фиг. 3 - схема блока компараторов на фиг. 4 - схема блока преобразования координат; на фиг. 5 - схема замещения асинхронного двигателя; на фиг. 6 - векторная диаграмма.
Частотно-регулируем1,1й электропривод Содержит асинхронный двигатель 1 подключенный к выходам силового преобразователя 2 частоты, датчик 3 частоты вращения, связанный с асинхронным двигателем 1 и подключенный выходом к одному из входов регулятора 4 частоты вращения, другой вход которого соединен с выходом блока 5 задания частоты вращения, регулятор 6 потокообразующей составляющей тока статора, подключенный одним из входо к выходу блока 7 задания потока, регулятор 8 моментообразующей составляющей тока статора, подключенный одним из входов к выходу регулятора А частоты вращения, блок 9 вычисления фазных задающих воздействий, управляющие входы которого подключены к выходам регуляторов 6 и 8 пото- кообразуюшей и моментообразующей составляющих тока статора, а выходы - к управляющим входам силового преобразователя 2 частоты, и датчики 10 и 11 фазных токов и напряжений соответственно.
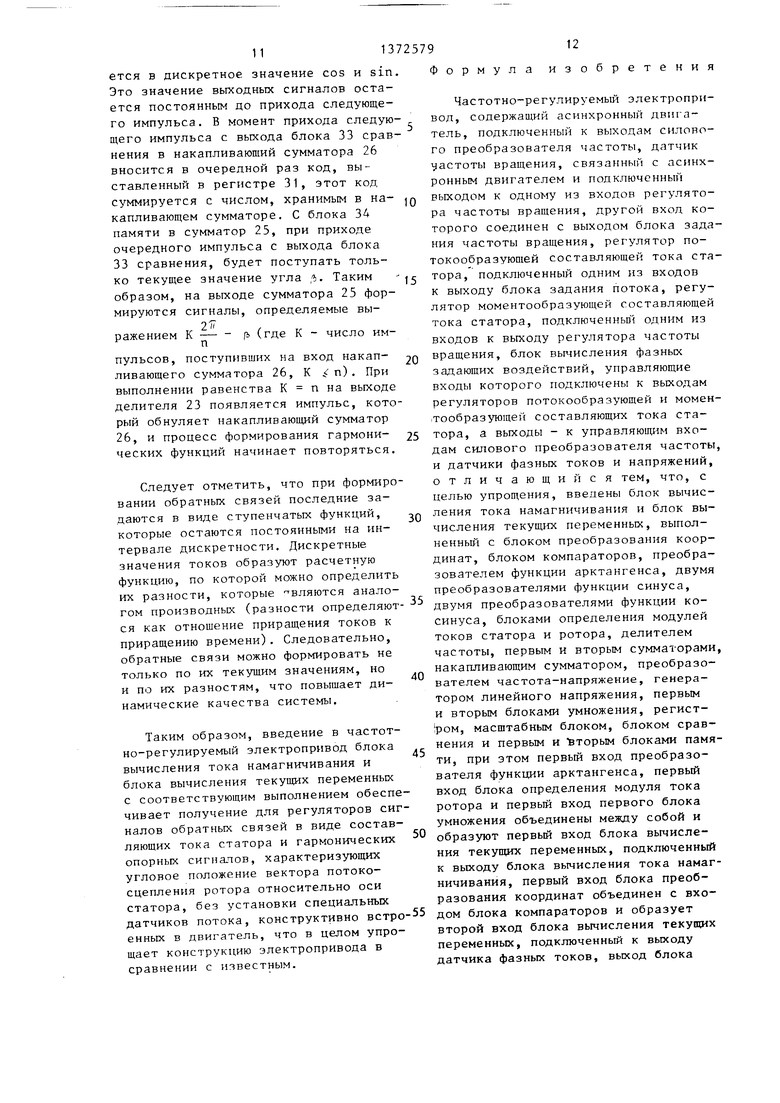
В частотно-регулируемый электрет- привод введены блок 12 вычисления тока намагничивания и блок 13 вычисления текущих переменных, составленный из блока 14 преобразования координат (фиг.2), блока 15 компараторов преобразователя 16 функции арктангенса, преобразователей 17 и 18 функции синуса, преобразователей 19 и 20 функции косинуса, блоков 21 и 22 определения модулей токов статора и ротора соответственно, делителя 23 частоты, первого 24 и второго 25 сумматоров, накапливающего сумматора 26
преобразователя 27 частота-напряжение, генератора 28 линейного напряжения, первого 29 и второго 30 блоков умножения, регистра 31, масштабного блока 32, блока 33 сравнения и первого 34 и второго 35 блоков памяти.
При этом первый вход преобразователя 16 функции арктангенса, первый
вход блока 22 определения модуля тока ротора и первый вход первого блока 29 умножения объединены и образуют первый вход блока 13 вычисления текущих переменных, подключенный к выхоДУ блока 12 вычисления тока намагничивания .
Первый вход блока 14 преобразования координат объединен с входом блока 15 компараторов и образует второй
вход блока 13 вычисления текущих переменных, подключенный к выходу датчика 10 фазных токов. Выход блока 15 компараторов подключен к второму входу блока 14 преобразования координат, входу делителя 23 частоты, входу преобразователя 27 частота- напряжение и первому управляющему входу генератора 28 линейного напря- . жения, основной вход которого соедииен с выходом преобразователя 27 частота-напряжение.
Выходы блока 14 преобразования координат подключены к соответствующим входам блоков 21 и 22 определения модулей токов статора и ротора и к входам преобразователя 16 функции арктангенса, выход которого подключен к входу первого преобразователя 19 функции косинуса, входу первого блока 34 памяти и одному из входов первого сумматора 24, соединенного другим входом с выходом генератора 28 линейного напряжения. Выход первого преобразователя 19 функции косинуса подключен к второму входу первого блока 29 умножения.
Выход блока 21 определения модуля тока статора подключен к первому входу второго блока 30 умножения, второй вход которого соединен с выходом первого преобразователя 17
функции синуса, подключенного входом к выходу первого сумматора 24. Выход блока 22 определения модуля тока ротора соединен с входом масштабного
блока 32, подключенного ВЬЕХОДОМ к первому входу блока 33 сравнения. Второй вход блока 33 сравнения и основной вход второго блока 35 памяти
подключены к выходу второго блока 30 умножения.
Выход блока 33 сравнения подключен к объединенным между собой управ ляющим входам генератора 28 линейног напряжения, первого блока 29 умножения, первого ЗА и второго 35 блоков памяти и накапливающего сумматора 26 другой управляющий вход которого со- единен с выходом делителя 23 частоты Основной вход накапливающего сумматора 26 подключен к выходу регистра 31, а выход накапливающего сумматора 26 - к одному из входов второго сумматора 25, другой вход которого подключен к выходу первого блока 34 памяти. Выход второго сумматора 25 соединен с входами вторых преобразователей 18 и 20 функции синуса и коси- нуса соответственно.
Выходы первого блока 29 умножения и второго блока 35 памяти образуют первую пару выходов блока 13 вычисления текущих переменных, подключенных .соответственно к другим входам регуляторов 6 и 8 потокообразующей и мо- ментообразующей составляющих тока статора. Выходы вторых преобразователей 18 и 20 функций синуса и коси- нуса образуют вторую пару выходов блока 13 вычисления текущих переменных, подключенных к соответствующим опорным входам блока 9 вычисления фазных задающих воздействий.
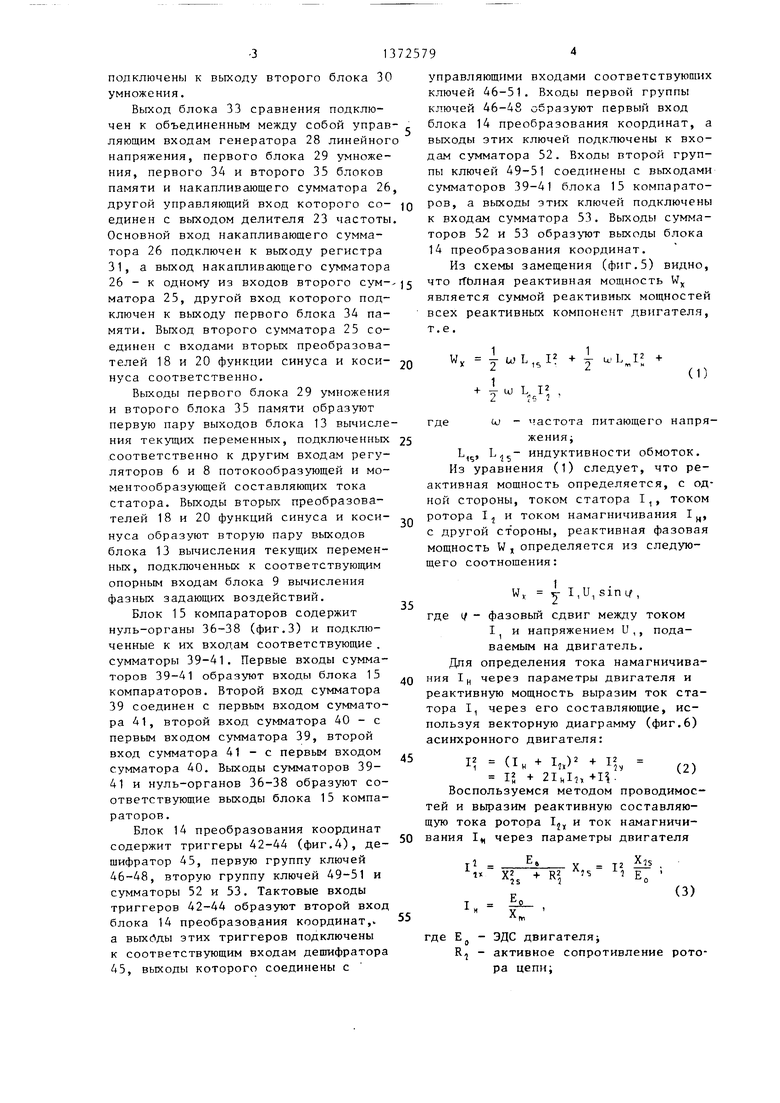
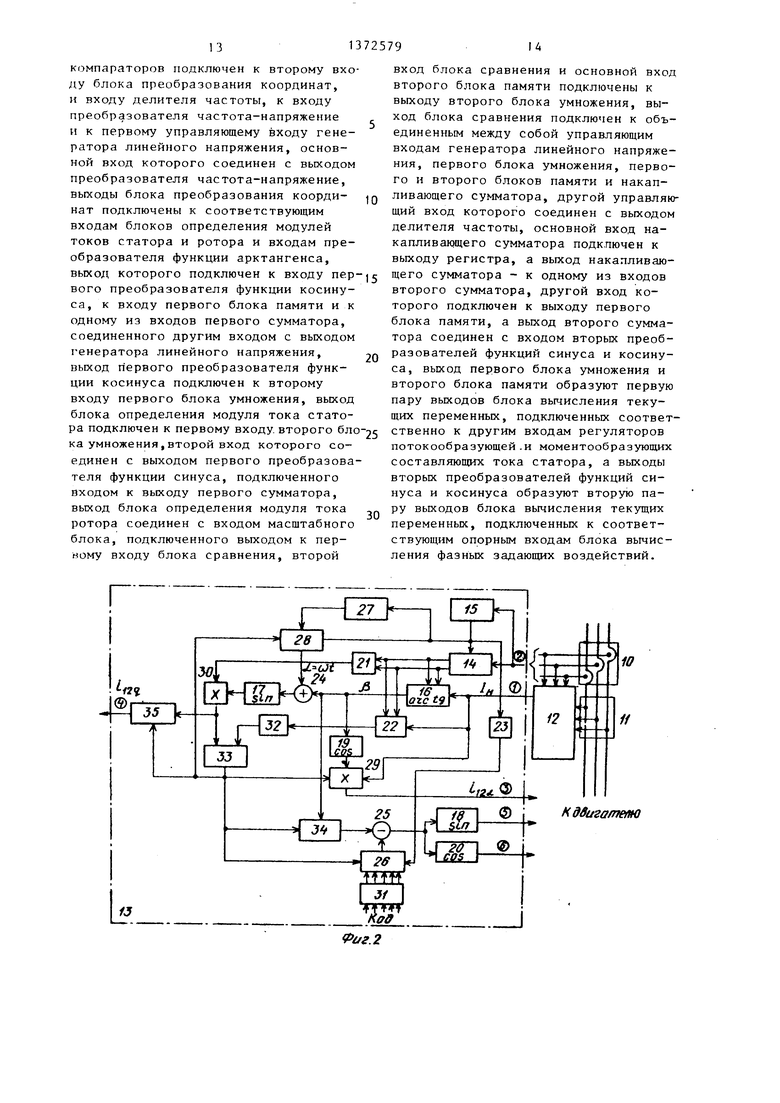
Блок 15 компараторов содержит нуль-органы 36-38 (фиг.З) н подключенные к их входам соответствующие , сумматоры 39-41. Первые входы сумматоров 39-41 образуют входы блока 15 компараторов. Второй вход сумматора 39 соединен с первым входом сумматора 41, второй вход сумматора 40 - с первым входом сумматора 39, второй вход сумматора 41 - с первым входом сумматора 40. Выходы сумматоров 39- 41 и нуль-органов 36-38 образуют соответствующие выходы блока 15 компараторов.
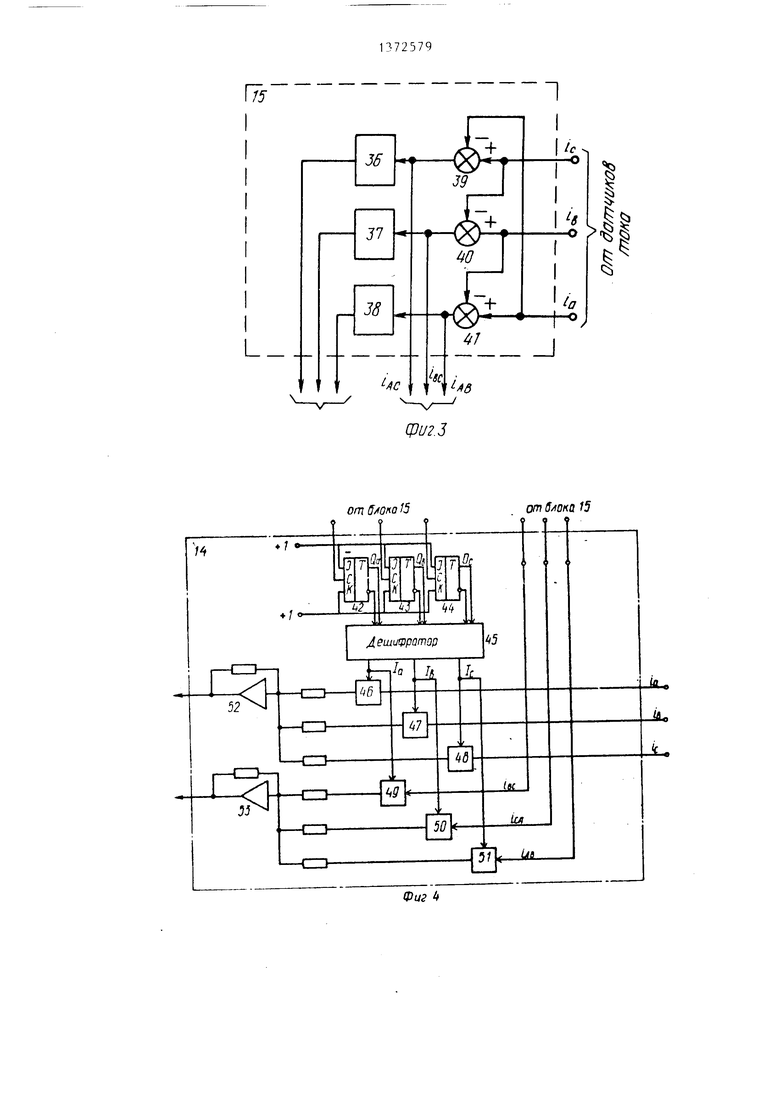
Блок 14 преобразования координат содержит триггеры 42-44 (фиг.4), дешифратор 45, первую группу ключей 46-48, вторую группу ключей 49-51 и сумматоры 52 и 53. Тактовые входы триггеров 42-44 образуют второй вход блока 14 преобразования координат,v а этих триггеров подключены к соответствующим входам дешифратора 45, выходы которого соединены с
управляющими входами соответствующих ключей 46-51. Входы первой группы ключей 46-48 образуют первый вход блока 14 преобразования координат, а выходы этих ключей подключены к входам сумматора 52. Входы второй группы ключей 49-51 соединены с выходами сумматоров 39-41 блока 15 компараторов, а выходы этих ключей подключены к входам сумматора 53. Выходы сумматоров 52 и 53 образ тот выходы блока 14 преобразования координат.
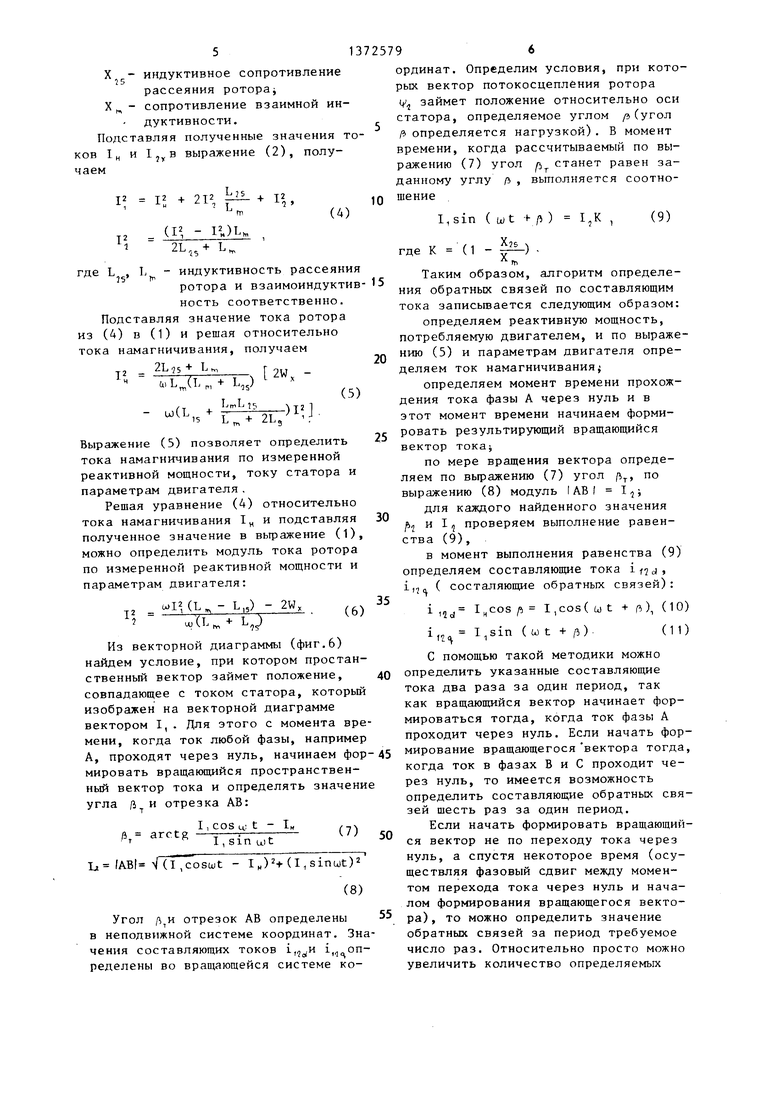
Из схемы замещения (фиг.5) видно, что гГЬлная реактивная мощность W является суммой реактивных мощностей всех реактивных компонент двигателя, т.е.
W, 1 wL,, +1 I Ь. (1)
где
ы - частота питающего напряжения
L,, индуктивности обмоток. Из уравнения (1) следует, что реактивная мощность определяется, с одной стороны, током статора I
1
током
I,
ротора 1 и током намагничивания , с другой ст ороны, реактивная фазовая мощность W , определяется из следующего соотношения:
W, у 1,и, sini/,
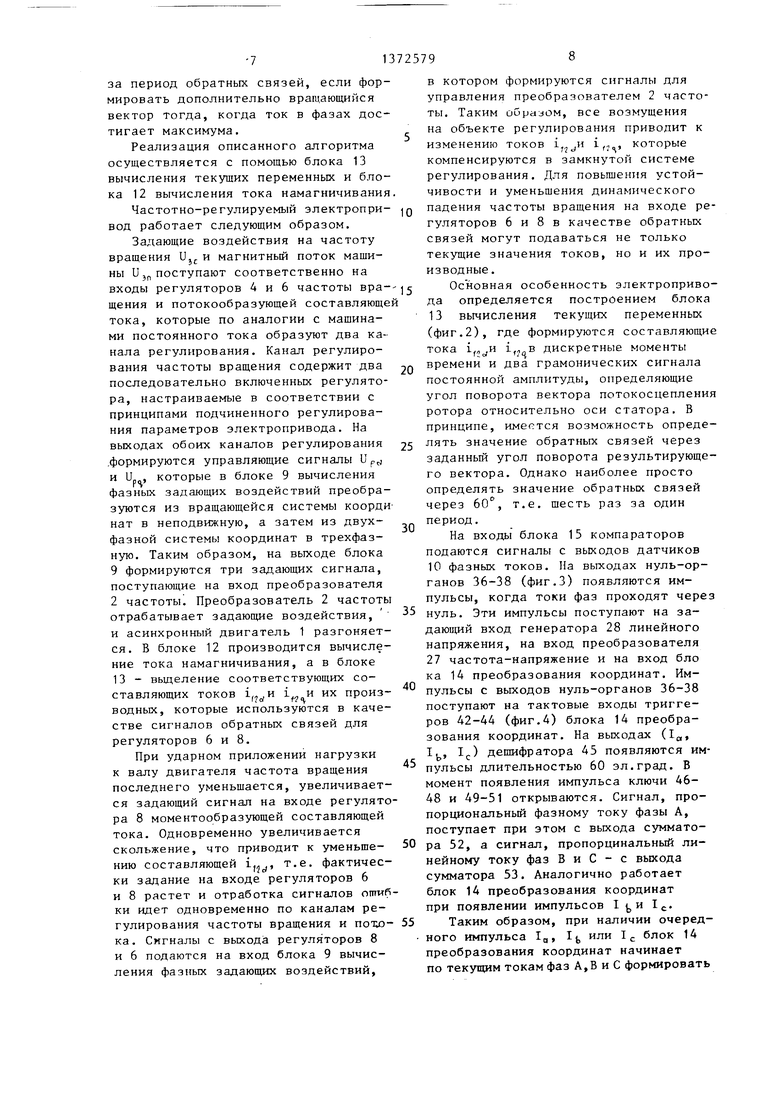
где (/ - фазовый сдвиг между током I и напряжением U,, подаваемым на двигатель. Для определения тока намагничивания 1 через параметры двигателя и реактивную мощность выразим ток статора I, через его составляющие, используя векторную диаграмму (фиг.6) асинхронного двигателя:
+ ,«)
Ц.
ц (IH Jx 5v - (2 15 + 21,. Воспользуемся методом проводимос- тей и выразим реактивную составляющую тока ротора I и ток намагничивания 1 через параметры двигателя
Ч.
ЁО. Х
+ R2.
Х Т2
1 Е„
(3)
где Ед - ЭДС двигателя;
R - активное сопротивление ротора цепи;
X - ирадуктивное сопротивление
рассеяния ротора X - сопротивление взаимной индуктивности.
Подставляя полученные значения токов IH и 1,.,в выражение (2), получаем
1 15 + 2Ц
Ljs
Ц.
(4)
(1 - 1н)Ь,
2Ь„+ L,
де L, . L
35
- индуктивность рассеяния ротора и взаимоиндуктив-15 ность соответственно. Подставляя значение тока ротора з (4) в (1) и решая относительно ока намагничивания, получаем 2W, с/
20
Т2 Ц
- ы(Ь
15 L
+ Ь„. LffiL 35
+ 2L
-)1
(5)
Выражение (5) позволяет определить тока намагничивания по измеренной реактивной мощности, току статора и параметрам двигателя.
Решая уравнение (4) относительно тока намагничивания 1„ и подставляя полученное значение в выражение (1), можно определить модуль тока ротора по измеренной реактивной мощности и параметрам двигателя:
Т2 - L,;) - 2W,
(L;, -ь L,
Из векторной диаграммы (фиг.6)
найдем условие, при котором простан- ственный вектор займет положение, совпадающее с током статора, который изображен на векторной диаграмме вектором I,. Для этого с момента времени, когда ток любой фазы, например
А, проходят через нуль, начинаем фор-45 мирование вращающегося вектора тогда.
когда ток в фазах Б и С проходит через нуль, то имеется возможность определить составляЮ11;ие обратных связей шесть раз за один период.
мировать вращающийся пространственный вектор тока и определять значение угла /1 и отрезка АВ:
I, cos и; t - 1«
ft arctg
т I, sin uit
(7)
Ь АВ| V(I ,cosait - lH)4(I,sinu)t)2
(8)
Угол отрезок АВ определены в неподвижной системе координат. Значения составляющих токов i, определены во вращающейся системе коо13725796
ординат. Определим условия, при которых вектор потокосцеплёния ротора
V займет положение относительно оси статора, определяемое углом /г (угол
ft определяется нагрузкой) . В момент времени, когда рассчитываемый по выражению (7) угол л станет равен заданному углу ь , выполняется соотношение
10
)
ия ив-15
20
5)
и
о я ), а и
25
30
I,sin ( wt ь /5 ) 1,К ,(9)
где К (1 - 1) . т
Таким образом, алгоритм определения обратных связей по составляющим тока записьгоается следующим образом:
определяем реактивную мощность, потребляемую двигателем, и по выражению (5) и параметрам двигателя определяем ток намагничиванияj
определяем момент времени прохождения тока фазы А через нуль и в зтот момент времени начинаем формировать результирующий вращающийся вектор тока;
по мере вращения вектора определяем по вьфажению (7) угол р, по выражению (8) модуль IАВI
для каждого найденного значения /ь, и I, проверяем выполнение равенства (9),
в момент выполнения равенства (9) определяем составляющие тока if7c).
6)
35
-п 1
н- ый реер
40
( состаляющие обратных связей): i,j 1„соз/5 I,cos(Mt -t- ft (10) i, ( Ш t + ,i). (11)
С помощью такой методики можно определить указанные составляющие тока два раза за один период, так как вращающийся вектор начинает формироваться тогда, когда ток фазы А проходит через нуль. Если начать формирование вращающегося вектора тогда.
когда ток в фазах Б и С проходит через нуль, то имеется возможность определить составляЮ11;ие обратных связей шесть раз за один период.
Если начать формировать вращающийся вектор не по переходу тока через нуль, а спустя некоторое время (осуществляя фазовый сдвиг между моментом перехода тока через нуль и началом формирования вращающегося вектора), то можно определить значение обратных связей за период требуемое число раз. Относительно просто можно увеличить количество определяемых
за период обратных связей, если формировать дополнительно вращающийся вектор тогда, когда ток в фазах достигает максимума.
Реализация описанного алгоритма осуществляется с помощью блока 13 вычисления текущих переменных и блока 12 вычисления тока намагничивания
Частотно-регулируемый электропри- вод работает следующим образом.
Задающие воздействия на частоту вращения Uj и магнитный поток машины и,поступают соответственно на входы регуляторов 4 и 6 частоты вращения и потокообразующей составляюще тока, которые по аналогии с машинами постоянного тока образуют два канала регулирования. Канал регулирования частоты вращения содержит два последовательно включенных регулятора, настраиваемые в соответствии с принципами подчиненного регулирования параметров электропривода. На выходах обоих каналов регулирования .формируются управляющие сигналы Up и и , которые в блоке 9 вычисления фазных задающих воздействий преобразуются из вращающейся системы координат в неподвижную, а затем из двух- фазной системы координат в трехфазную. Таким образом, на выходе блока 9 формируются три задающих сигнала, поступающие на вход преобразователя 2 частоты. Преобразователь 2 частоты отрабатывает задаюЕцие воздействия, и асинхронный двигатель 1 разгоняется. В блоке 12 производится вычисление тока намагничивания, а в блоке 13 - выделение соответствующих со
ставляющих токов 1,и L и их производных, которые используются в качестве сигналов обратных связей для регуляторов 6 и 8.
При ударном приложении нагрузки к валу двигателя частота вращения последнего уменьщается, увеличивается задающий сигнал на входе регулятора 8 моментообразующей составляющей тока. Одновременно увеличивается
скольжение, что приводит к уменьше- нию составляющей i,, т.е. фактически задание на входе регуляторов 6 и 8 растет и отработка сигналов omwR ки идет одновременно по каналам регулирования частоты вращения и noi;o- ка. Сигналы с выхода регуляторов 8 и 6 подаются на вход блока 9 вычисления фазных задающих воздействий.
Q
Q 5 -
0
5
0
в котором формируются сигналы для управления преобразователем 2 частоты. Таким образом, все возмущения на объекте регулирования приводит к изменению токов 1,, i,; , которые компенсируются в замкнутой системе регулирования. Для повышения устойчивости и уменьшения динамического падения частоты вращения на входе регуляторов 6 и 8 в качестве обратных связей могут подаваться не только текущие значения токов, но и их производные.
Основная особенность электропривода определяется построением блока 13 вычисления текущих переменных (фиг.2), где формируются составляющие тока 1,,,и 1,одВ дискретные моменты времени и два грамонических сигнала постоянной амплитуды, определяющие угол поворота вектора потокосцепления ротора относительно оси статора. В принципе, имеется возможность определять значение обратных связей через заданный угол поворота результирующего вектора. Однако наиболее просто определять значение обратных связей через 60°, т.е. щесть раз за один период.
На входы блока 15 компараторов подаются сигналы с выходов датчиков 10 фазнЕ 1х токов. На выходах нуль-органов 36-38 (фиг.З) появляются импульсы, когда токи фаз проходят через нуль. Эти импульсы поступают на задающий вход генератора 28 линейного напряжения, на вход преобразователя 27 частота-напряжение и на вход бло ка 14 преобразования координат. Импульсы с выходов нуль-органов 36-38 поступают на тактовые входы триггеров 42-44 (фиг.4) блока 14 преобразования координат. На выходах (1„, Ij., (,) дешифратора 45 появляются импульсы длительностью 60 эл.град. В момент появления импульса ключи 46- 48 и 49-51 открываются. Сигнал, пропорциональный фазному току фазы А, поступает при этом с выхода сумматора 52, а сигнал, пропорцинальный линейному току фаз В и С - с выхода сумматора 53. Аналогично работает блок 14 преобразования координат при появлении импульсов I t сТаким образом, при наличии очередного импульса Ig, I jj или I . блок 14 преобразования координат начинает по текущим токам фаз А,В и С формировать
составляющие векторов i
и 1
(0|
в
ортогональной неподвижной системе координат по выражениям
i ,р l,cos со t, (12) i( I,sinw t, (13)
где I , - модуль пространственного
вращающегося вектора.
Составляющие токов i и i ,j, по- ступают на функциональный преобразователь 16, в котором осуществляется определение угла /Ь согласно соотношению
I,COS О) t - 1н
1Ъ arctg ----7--
I.sinwt ,
arctg ° -. .
Функциональные преобразователи 16-18 и 20 могут быть реализованы программно, методами кусочно-линейной аппроксимации (методами аналоговой техники) или с помощью дешифратора (методами дискретной техники).
Для вычисления текущих значений переменных необходимо иметь напряжение, пропорциональное углу поворота пространственного вращающегося вектора тока. Это осуществляется с по- мощью преобразователя 27 частота- напряжение и генератора 28 линейного напряжения. На вход преобразователя 27 ч астота-напряжение подается сигнал в виде последовательности им- пульсов с блока 15 компараторов. Напряжение с выхода преобразователя 27 частота-напряжение подается на вход генератора 28 линейного напряжения который запускается сигналом с выхо- да блока 15 компараторов, когда ток очередной фазы проходит через ноль. Сигналы на выходе генератора 28 линейного напряжения и сигнал с входа функционального преобразователя 16, суммируются в сумматоре 24, а затем поступают на функциональный преобразователь 17, в котором по заданному значению аргумента определяется функция sin( и t + /i) . Далее, сигнал с выхода функционального преобразователя 17 подается на блок 30 умножения, на вторые входы которого поступает сигнал с выхода блока 21 определения модуля. Сигнал с выхода блока 30 умножения поступает на оди из входов блока 33 сравнения, на второй вход которого поступает сигнал с выхода масштабного блока 32,
на второй вход которого с блока 22 поступает сигнал, пропорциональный модулю тока ротора.
В масштабном блоке 32 ток ротора Ij умножается на козффициент К
1 + . Таким образом в блоке 33
1г
сравнения осуществляется сравнение двух изменяющихся во время функции: I,sin(xJt и . В момент выполнения равенства (9) на выходе блока 33 появляется импульс, по которому обнуляется генератор 28 линейного напряжения и фиксируются сигналы, поступающие в блоки 34 и 35 памяти. Выполнение равенства (9) означает, что найден угол f, определяющий положение Vj. В момент определения угла /з в блоке 35 памяти фиксируется выходной сигнал блока 30 умножения, который, являясь сигналом обратной связи i подается на вход регулятора 8 момента. В тот же момент времени в блоке 29 умножения осуществляется определение сигнала обратной связи который подается на вход регулятора 6 потока.
Для осуществления перехода переменных от координат ротора к координатам статора необходимо иметь гармонические функции идентичной амплитуды, определяющие изменение потоко- сцепления ротора. Эти функции синтезируются в функциональных преобразователях 18 и 20 и подаются на соответствующие входы блока 9 вычисления фазных задающих воздействий. Для осуществления синтеза гармонических функций необходимо в регистр 31 занести код, определяемый выражением
2 ,
- (где п - число точек на периоде
п
питающего напряжения, в которых определяются значения обратных связей), а в делителе 23 частоты выставить коэффициент деления, равный п. В момент времени выполнения равенства (4) на выходе блока 33 сравнения появляется импульс, по которому выставленный в регистре 31 код заносится в накапливающий сумматор 26 и далее переносится в сумматор 25. По этому импульсу на второй вход сумматора 25 поступает сигнал с выхода блока 34 памяти, равный углу ,г.
В функциональных преобразователях 18 и 20 поступивший сигнал преобразу11
ется в дискретное значение cos и sin Это значение выходных сигналов остается постоянным до прихода следующего импульса. В момент прихода следующего импульса с выхода блока 33 сравнения в накапливающий сумматора 26 вносится в очередной раз код, выставленный в регистре 31, этот код суммируется с числом, хранимым в накапливающем сумматоре. С блока 34 памяти в сумматор 25, при приходе очередного импульса с выхода блока 33 сравнения, будет поступать только текущее значение угла . Таким образом, на выходе сумматора 25 формируются сигналы, определяемые вы- 2
ражением К
п
- fb (где К - число им
пульсов, поступивших на вход накапливающего сумматора 26, К п). При выполнении равенства К п на выходе делителя 23 появляется импульс, который обнуляет накапливающий сумматор 26, и процесс формирования гармони- ческих функций начинает повторяться.
Следует отметить, что при формировании обратных связей последние задаются в виде ступенчатых функций, которые остаются постоянными на интервале дискретности. Дискретные значения токов образуют расчетную функцию, по которой можно определить их разности, которые вляются анало30
Частотно-регулируемый электропр вод, содержащий асинхронный двигатель, подключенный к выходам силов го преобразователя частоты, датчик частоты вращения, связанный с асинх ронным двигателем и подключенный выходом к одноъгу из входов регулято ра частоты вращения, другой вход ко торого соединен с выходом блока зад ния частоты вращения, регулятор по- токообразуюшей составляющей тока ст тора, подключенный одним из входов к выходу блока задания потока, регу лятор моментообразующей составляюще тока статора, подключенньп одним из входов к выходу регулятора частоты вращения, блок вычисления фазньсх задающих воздействий, управляющие входы которого подключены к выходам регуляторов потокообразующей и моме |Тообразующей составляющих тока статора, а выходы - к управляющим входам силового преобразователя частот и датчики фазных токов и напряжений отличающийся тем, что, с целью упрощения, введены блок вычис ления тока намагничивания и блок вы числения текущих переменных, выполненный с блоком преобразования коор динат, блоком компараторов, преобра зователем функции арктангенса, двум преобразователями функции синуса.
гом производных (разности определяют- двумя преобразователями функции кося как отнощение приращения токов к приращению времени). Следовательно, обратные связи можно формировать не только по их текущим значениям, но и по их разностям, что повышает динамические качества системы.
Таким образом, введение в частотно-регулируемый электропривод блока вычисления тока намагничивания и блока вычисления текущих переменных с соответствующим выполнением обеспечивает получение для регуляторов сигналов обратных связей в виде составляющих тока статора и гармонических опорных сигналов, характеризующих угловое положение вектора потоко- сцепления ротора относительно оси статора, без установки специальных датчиков потока, конструктивно встро енных в двигатель, что в целом упрощает конструкцию электропривода в сравнении с известным.
2579
Формул
12 изобретения
10
5
0
5
0
Частотно-регулируемый электропривод, содержащий асинхронный двигатель, подключенный к выходам силового преобразователя частоты, датчик частоты вращения, связанный с асинхронным двигателем и подключенный выходом к одноъгу из входов регулятора частоты вращения, другой вход которого соединен с выходом блока задания частоты вращения, регулятор по- токообразуюшей составляющей тока статора, подключенный одним из входов к выходу блока задания потока, регулятор моментообразующей составляющей тока статора, подключенньп одним из входов к выходу регулятора частоты вращения, блок вычисления фазньсх задающих воздействий, управляющие входы которого подключены к выходам регуляторов потокообразующей и момен- |Тообразующей составляющих тока статора, а выходы - к управляющим входам силового преобразователя частоты, и датчики фазных токов и напряжений, отличающийся тем, что, с целью упрощения, введены блок вычисления тока намагничивания и блок вычисления текущих переменных, выполненный с блоком преобразования координат, блоком компараторов, преобразователем функции арктангенса, двумя преобразователями функции синуса.
- двумя преобразователями функции ко40
45
50
55
синуса, блоками определения модулей токов статора и ротора, делителем частоты, первым и вторым сумматорами, накапливающим сумматором, преобразователем частота-напряжение, генератором линейного напряжения, первым и вторым блоками умножения, регист- IpoM, масштабным блоком, блоком сравнения и первым и вторым блоками памяти, при этом первый вход преобразователя функции арктангенса, первый вход блока определения модуля тока ротора и первый вход первого блока умножения объединены между собой и образуют первый вход блока вычисления текупщх переменных, подключенный к выходу блока вычисления тока намагничивания, первый вход блока преобразования координат объединен с входом блока компараторов и образует второй вход блока вычисления текущих переменных, подключенный к выходу датчика фазных токов, выход блока
компараторов подключен к второму входу блока преобразования координат, н входу делителя частоты, к входу преобразователя частота-напряжение н к первому управляющему входу генератора линейного напряжения, основной вход которого соединен с выходом преобразователя частота-напряжение, выходы блока преобразования коорди- нат подключены к соответствующим входам блоков определения модулей токов статора и ротора и входам преобразователя функции арктангенса, выход которого подключен к входу пер вого преобразователя функции косинуса, к входу первого блока памяти и к одному из входов первого сумматора, соединенного другим входом с выходом генератора линейного напряжения, выход п ервого преобразователя функции косинуса подключен к второму входу первого блока умножения, выход блока определения модуля тока статора подключен к первому входу, второго бло-25 ственно к другим входам регуляторов
потокообразующей .и моментообразующих составляющих тока статора, а выходы вторых преобразователей функций синуса и косинуса образуют вторую пару выходов блока вычисления текущих переменных, подключенных к соответствующим опорным входам блока вычисления фазных задающих воздействий.
ка умножения, второй вход которого соединен с выходом первого преобразователя функции синуса, подключенного входом к выходу первого сумматора, выход блока определения модуля тока ротора соединен с входом масщтабного блока, подключенного выходом к пер- ному входу блока сравнения, второй
30
Г
вход блока сравнения и основной вход второго блока памяти подключены к выходу второго блока умножения, выход блока сравнения подключен к объ- единенньгм между собой управляющим входам генератора линейного напряжения, первого блока умножения, первого и второго блоков памяти и накапливающего сумматора, другой управляющий вход которого соединен с выходом делителя частоты, основной вход накапливающего сумматора подключен к выходу регистра, а выход накапливающего сумматора - к одному из входов второго сумматора, другой вход которого подключен к выходу первого блока памяти, а выход второго сумматора соединен с входом вторых преобразователей функций синуса и косинуса, выход первого блока умножения и второго блока памяти образуют первую пару выходов блока вычисления текущих переменных, подключенных соответ 1 О ; Кдвигот&м
Г75I
VU2.3
от S/Ока /5
от 15
/S
Фиг. 5
Эт
(рие. 6
-zs
б
| Патент США № 3909687, кл | |||
| Способ приготовления строительного изолирующего материала | 1923 |
|
SU137A1 |
| Сплав для отливки колец для сальниковых набивок | 1922 |
|
SU1975A1 |
| Электропривод с асинхронной машиной | 1971 |
|
SU548220A3 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
