Изобретение относится к способу и системам управления летательными аппаратами, как вращающимися по углу крена, так и не вращающимися, и может быть использовано на ракетах, формирующих на борту команды управления.
Известен способ формирования команд управления на ракете, вращающейся по углу крена, и система управления ракетой, основанная на нем [Патент России №2282129 от 14.12.04 г., МКИ7 F41G 7/00]. Известный способ формирования команд управления на ракете, вращающейся по углу крена, включает формирование сигнала вращения датчиком угла крена, декодирование принимаемых командных сообщений и последующую выработку из них сигналов управления ракетой по курсу и тангажу, при котором сигнал с датчика крена преобразуют в линеаризированный сигнал, который с учетом угла крена ракеты сравнивают с сигналами декодированных значений командных сообщений соответственно по курсу и тангажу, по результатам сравнения формируют сигналы команд управления ракетой в виде широтно-импульсного модулированного сигнала, при этом величину размаха линеаризованного сигнала устанавливают независимой от длительности сигнала вращения.
Известная система управления ракетой, использующая этот способ, содержит преобразователь координат, датчик крена, силовой привод, а также последовательно включенные приемник и аппаратуру разделения каналов и декодирования по курсу и тангажу, первый и второй выходы которой соединены соответственно с первым и вторым входами преобразователя координат, в нее введены логическая схема «исключающее ИЛИ», линеаризатор сигнала и релейный элемент, при этом третий и четвертый входы преобразователя координат соединены соответственно с первым и вторым входами логической схемы «исключающее ИЛИ» и с первым и вторым входами датчика крена, выход логической схемы «исключающее ИЛИ» соединен со входом линеаризатора сигнала, при этом выход преобразователя координат соединен с первым входом релейного элемента, второй вход которого подключен к выходу линеаризатора сигнала, а выход релейного элемента подключен ко входу силового привода.
В известном техническом решении креновый сигнал формирует датчик угла крена, представляющий собой электромеханическое устройство, выполненное, например, на позиционном гироскопе, которое имеет большие габаритно-массовые характеристики и сложную конструкцию.
Таким образом, недостатком известных способа формирования команд управления на ракете, вращающейся по углу крена, и системы управления ракетой, вращающейся по углу крена, который она реализует, является недостаточно высокая надежность из-за сложности конструкции датчика угла крена и большие габаритно-массовые характеристики реализуемой системы управления ракетой, ограничиваемые параметрами датчика угла крена.
Известен способ преобразования координат и преобразователь координат, его реализующий [В.А.Павлов, С.А.Понырко и Ю.М.Хованский. Стабилизация летательных аппаратов и автопилоты. М.: Высшая школа, 1964 г., стр.208-210, рис.6.11], которые осуществляют на ракете, вращающейся по углу крена, в соответствии с текущей величиной сигнала угла крена изменение фазы сигналов по курсу и тангажу, т.е. вращают фазы этих сигналов.
Известный способ преобразования координат, при котором формируют в каждом из двух каналов в двух плоскостях управления движением ракеты, вращающейся по углу крена, сигналы соответственно в виде первой и второй алгебраических сумм, каждую из которых образуют первым и вторым произведениями, которые вычисляют в первом канале умножением сигналов отклонения по курсу и тангажу соответственно на косинус и синус текущего угла крена, а затем вычитают из первого второе, а для второго канала - умножением сигналов отклонения по курсу и тангажу соответственно на синус и косинус текущего угла крена, которые затем суммируют.
Известное устройство, его реализующее, содержит в каждом из двух каналов (по курсу и тангажу) два потенциометра, движки которых установлены под углом 90° относительно друг друга и подключены соответственно к первому и второму входам сумматора-усилителя, а оси движков соединены механически с гироскопом, причем входы потенциометров из первого и второго каналов попарно объединены и подсоединены к выходам формирователя сигналов отклонения по углам соответственно курса и тангажа.
Поскольку снимаемые с потенциометров напряжения пропорциональны соответственно синусу и косинусу, то известный преобразователь представляет собой синус-косинусный фазовращатель, а способ преобразования координат - способ вращения фазы двух сигналов на ракете соответственно в первом и во втором каналах.
Недостатком известных способа вращения фазы сигнала на ракете и синус-косинусного фазовращателя, его реализующего, является недостаточно высокая точность и надежность из-за сложности конструкции и большие габаритно-массовые характеристики, что не позволяет применить их для корректировки угла крена (корректировки фазы сигналов).
Задачей предлагаемой группы изобретений является повышение надежности и уменьшение габаритно-массовых характеристик.
Поставленная задача решается за счет того, что в способе формирования команд управления на ракете, при котором вырабатывают сигнал крена, которым формируют из преобразованных декодированных принимаемых сигналов соответственно по курсу и тангажу команды управления ракетой, в первоначальный момент времени измеряют либо устанавливают заранее известное значение начального угла крена ракеты, а также измеряют в двух взаимно перпендикулярных плоскостях, пересекающих ось ракеты, составляющие магнитного поля Земли, преобразуемые в два соответствующих электрических сигнала, которые определяют исходный угол крена ракеты по магнитному полю Земли, вычисляют и запоминают величину ошибки как разницу исходного и начального углов крена ракеты, суммируют текущий угол крена ракеты по магнитному полю Земли с величиной ошибки и с учетом величины суммарного угла вырабатывают сигнал крена.
Ракета, вращающаяся по углу крена, содержит последовательно соединенные бортовую аппаратуру управления и рулевой привод, в нее введены последовательно соединенные датчик магнитного поля Земли и корректор угла крена и последовательно соединенные задатчик начального угла крена и вычислитель, второй и третий входы которого соединены с первым и вторым выходами датчика магнитного поля Земли, при этом первый и второй выходы вычислителя соединены соответственно с третьим и четвертым входами корректора угла крена, выходы которого соединены соответственно с первым и вторым входами по углу крена бортовой аппаратуры управления.
Способ коррекции угла крена, при котором формируют в каждом из двух каналов в двух плоскостях управления движением ракеты сигналы соответственно в виде первой и второй алгебраических сумм, каждую из которых образуют первое и второе произведения, вычисляют величину ошибки и формируют из нее два сигнала коррекции в каждом канале, при этом в первом канале первое и второе произведения формируют умножением первого и второго сигналов коррекции соответственно на косинус и синус текущего угла крена, причем при положительной величине ошибки произведения складывают, а при отрицательной из второго произведения вычитают первое, во втором канале формируют умножением первого и второго сигналов коррекции соответственно на синус и косинус величины текущего угла крена, причем при положительной величине ошибки из второго произведения вычитают первое, а при отрицательной - произведения складывают.
Корректор угла крена, содержащий два канала, в каждый из которых входит сумматор, введены в каждый канал два перемножителя, выходы которых соединены соответственно с первым и вторым входами сумматора, при этом первые входы первого и второго перемножителей соответственно из первого и второго каналов объединены и являются первым входом корректора угла крена, первые входы второго и первого перемножителей соответственно из первого и второго каналов объединены и являются вторым входом корректора угла крена, вторые входы первых перемножителей из обоих каналов объединены и являются третьим входом корректора угла крена, вторые входы вторых перемножителей из обоих каналов объединены и являются четвертым входом корректора угла крена, а выходы первого и второго сумматоров являются соответственно первым и вторым выходами корректора угла крена, причем второй перемножитель из второго канала выполнен с инверсией.
Заявленный способ формирования команд управления на ракете, поясняется векторной диаграммой, приведенной на фиг.1, где вектор ОС - электрический сигнал
U1, соответствующий величине первой составляющей магнитного поля Земли, вектор ОА - электрический сигнал U2, соответствующий второй составляющей магнитного поля Земли, вектор ОВ - амплитуда этого сигнала (суммарный сигнал), φм - исходный угол крена ракеты по магнитному полю Земли, ОО' - вертикаль, АА' - начальное отклонение ракеты по крену, φ0 - начальный угол крена ракеты и Δφ - угол ошибки, на который надо повернуть суммарный вектор.
Для описания движения ракеты применяют декартову систему координат OXYZ, связанную с ее корпусом. Начало этой системы располагают в центре масс ракеты. Ось Х совпадает с продольной осью ракеты и направлена в сторону ее головной части. Ось Y лежит в вертикальной плоскости симметрии ракеты и направлена вверх, например, при полете ракеты без крена. Ось Z направлена так, чтобы система координат была правой. При этом угол крена - угол между осью Y и вертикальной плоскостью, содержащей ось Х [Основы радиоуправления, под ред. Вейцеля В.А. и Типугина В.А., М.: Сов. радио, 1973 г. стр.12]. Графическое изображение изложенной выше системы координат ракеты и угла крена, связанных с ее корпусом, приведено в схеме преобразования координат [В.А.Павлов, С.А.Понырко и Ю.М.Хованский. Стабилизация летательных аппаратов и автопилоты. М.: Высшая школа, 1964 г., стр.209, рис.6.11].
В описании заявленного способа формирования команд управления на ракете на плоскости чертежа изображен начальный угол крена ракеты φ0 - угол поворота (разворота) ракеты вокруг своей продольной оси при установке ее, например, практически горизонтально на пусковой установке. Угол крена измеряется относительно вертикали. Следовательно, плоскость чертежа перпендикулярна продольной оси ракеты (ось X), при этом ось Y - вектор ОА, а ось Z - вектор ОС образуют правую декартову систему координат.
Кроме того, векторы ОА и ОС образуются при проекции соответственно двух взаимно перпендикулярных плоскостей, пересекающих продольную ось ракеты, на плоскость чертежа, что видно из изложенного выше. На фиг.1 для упрощения изображения эти две плоскости начинаются от продольной оси ракеты, при этом векторы ОА и ОС начинаются соответственно также из проекции продольной оси ракеты на плоскость чертежа, т.е. точки О.
Таким образом, на ракете в двух взаимно перпендикулярных плоскостях, пересекающих ее продольную ось и образующих векторы ОА и ОС, измеряют первую и вторую составляющие магнитного поля Земли, отношение величин которых позволяет определить исходный (начальный) угол крена ракеты, а при полете - текущий (изменяемый). Измерение производят двумя идентичными датчиками магнитного поля Земли, первый из которых установлен на первой плоскости, а второй - на второй.
Заявленный способ реализуется следующим образом. В первоначальный момент времени, например, при расположении ракеты на пусковой установке в строго заданном положении, известно значение начального угла крена ракеты, равное φ0. А при установке в произвольном положении ракеты по углу крена этот угол измеряют, например, с помощью маятника, определяющего относительно вертикали угол крена ракеты [например, патент России №2291382 от 19.07.05 г., МКИ7 F42B 15/00], равный, например, также φ0.
На ракете расположены два идентичных датчика магнитного поля Земли, которые развернуты относительно друг друга на 90°. Эти два датчика измеряют в двух взаимно перпендикулярных плоскостях, пересекающих ось ракеты, соответственно первую и вторую составляющие магнитного поля Земли. Преобразуют эти составляющие соответственно в два электрических сигнала, величины которых равны


Эти сигналы приведены в виде векторов на фиг.1.
Поскольку в первоначальный момент времени исходный угол крена ракеты по магнитному полю Земли φм может быть любой, то требуется его корректировка, например, до момента схода ракеты с пусковой установки.
Поэтому, например, до момента схода ракеты с пусковой установки, определяют величину амплитуды А. Для этого, например, возводят в квадрат правые и левые части выражений 1 и 2, которые затем суммируют и с учетом sin2φм+cos2φм=1 получают

откуда

Таким образом, величина амплитуды А и измеренные величины U1 и U2 с учетом их знаков определяют на выходах датчиков магнитного поля в первоначальный момент времени исходный угол крена ракеты φм, который равен

Как следует из фиг.1, угол φм можно определить и иначе, например, как arctgU2/U1 и т.д.
Вычисляют и запоминают величину ошибки как разницу (с учетом знака) исходного φм и начального φ0 углов крена ракеты, например как

Величину ошибки Δφ алгебраически (с учетом знака) суммируют с текущим углом крена ракеты по магнитному полю Земли, равным

где t≥0.
Таким образом, суммарный (скорректированный) текущий угол крена ракеты по магнитному полю Земли в общем случае равен

Например, для ракеты, вращающейся по углу крена, величина суммарного (скорректированного) текущего угла крена ракеты по магнитному полю Земли равна

где ω - угловая скорость вращения ракеты по углу крена. С учетом величины суммарного (скорректированного) текущего угла крена ракеты по магнитному полю Земли вырабатывают сигнал крена ракеты, например, в виде:


Сигналы (выражения 10 и 11) на ракете, например, преобразуют в два импульсных сигнала с логическими уровнями нуль и единица, которые представляют собой двухразрядное двоичное число в параллельном коде, имеющее четыре дискретных значения 11, 10, 00 и 01, соответствующие углам крена, например 0°…90°, 90°…180°, 180°…270° и 270°…360°.
Этим сигналом формируют из преобразованных декодированных принимаемых сигналов соответственно по курсу и тангажу в каждую четверть кренового периода команды управления ракетой, например, как в прототипе.
Данный заявленный способ формирования команд управления можно применить и на ракете, не вращающейся по углу крена, при котором формируют команды управления ракетой с учетом измеряемого на борту значения угла крена.
Установку (коррекцию) исходного угла крена можно проводить не только на пусковой установке (до схода ракеты), но и на траектории полета ракеты, например, на неуправляемом участке.
Предлагаемое изобретение поясняется чертежами, приведенными на фиг.2, 3, 4 и 5. На фиг.2 и 4 представлены структурные электрические схемы соответственно ракеты, вращающейся по углу крена, и корректора угла крена, где 1 - бортовая аппаратура управления (БАУ); 2 - приемник (П); 3 - датчик магнитного поля Земли (ДМП); 4 - задатчик начального угла крена (ЗНУ); 5 - аппаратура разделения каналов и декодирования по курсу и тангажу (АРКД); 6 - корректор угла крена (КУК); 7 - вычислитель (В); 8 - преобразователь координат (ПК); 9 - релейный элемент (РЭ); 10 - линеаризатор сигнала (ЛС); 11 - рулевой привод (РП), 12 и 13 - соответственно первый и второй перемножители (П1 и П2); 14 - умножитель (У); 15 - управляемый инвертор (УИ) и 16 - сумматор (С).
На фиг.3 приведены эпюры сигналов, где представлены: "а" и "б" - сигналы на первом и втором выходах датчика магнитного поля 3; "в" и "г" - выходные сигналы корректора угла крена 6, преобразованные соответственно в первый и второй логические сигналы.
На фиг.5 приведены эпюры сигналов, где представлены: "д" - сигналы в первом канале на выходах первого 12 и второго 13 перемножителей (соответственно пунктирная и тонкая линии) и на выходе сумматора 16 (синусоидальный сигнал, скорректированный на величину Δφ=30° - толстая линия); "е" - сигналы в первом канале на выходах первого 12 и второго 13 перемножителей (соответственно пунктирная и тонкая линии) и на выходе сумматора 16 (синусоидальный сигнал, скорректированный на величину минус Δφ=30° - толстая линия); "ж" - сигналы во втором канале на выходах первого 12 и второго 13 перемножителей (соответственно тонкая и пунктирная линии) и на выходе сумматора 16 (косинусоидальный сигнал, скорректированный на величину Δφ=30° - толстая линия); "з" - сигналы во втором канале на выходах первого 12 и второго 13 перемножителей (соответственно тонкая и пунктирная линии) и на выходе сумматора 16 (косинусоидальный сигнал, скорректированный на величину минус Δφ=30° - толстая линия).
В ракете, вращающейся по углу крена, последовательно соединены бортовая аппаратура управления 1 и рулевой привод 11. Последовательно включены задатчик начального угла крена 4 и вычислитель 7. Первый и второй выходы датчика магнитного поля Земли 3 соединены с первым и вторым входами корректора угла крена 6 и вторым и третьим входами вычислителя 7. Первый и второй выходы вычислителя 6 соединены с третьим и четвертым входами корректора угла крена 6. Первый и второй выходы корректора угла крена 6 соединены соответственно с первым и вторым входами бортовой аппаратуры 1.
Бортовая аппаратура управления 1 может быть выполнена как приведенная на фиг.1, т.е. как в устройстве по патенту России №2282129 от 14.12.04 г. Датчик магнитного поля Земли 3 может быть выполнен, например, как два магниточувствительных датчика KMZ 51 фирмы "Philips". Задатчик начального угла крена 4 может быть выполнен, например, как программно-запоминающее устройство (ПЗУ), в которое зашиты двоичные числа, величины которых соответствуют конкретным наперед заданным величинам начальных углов крена ракеты, с одним из которых ракета может быть расположена на пусковой установке, т.е. одно или несколько разных значений φ0.
Корректор угла крена 6 может быть выполнен, например, как приведенный на фиг.4. Вычислитель 7 может быть выполнен, например, на ПЗУ, каждое из которых выполняет соответствующую математическую функцию (согласно выражений 3-8), т.е. возведение в квадрат, извлечение квадратного корня, деление и т.д., а также вычисление и запоминание Δφ. Вычислитель 7 может быть выполнен также на процессоре. Рулевой (силовой) привод 11 может быть выполнен, как в прототипе по патенту РФ №2282129.
Первые перемножители 12 и вторые 13а и 13б, например, умножающие цифроаналоговые преобразователи (ПАП), использующие для построения усилитель с управляемым коэффициентом усиления на микросхеме К572ПА1 [B.C.Гутников. Интегральная электроника в измерительных устройствах. Л.: Энергоатомиздат, 1988 г., стр.234-235, рис.9.4]. При этом сигнал, поступающий на второй вход перемножителя 13а, подается со своим знаком, а на второй вход 13б, например, с обратным знаком или со своим знаком, но при этом с выхода умножителя 14 сигнал инвертируется инвертором 15. Сумматор 16 выполнен, например, на операционном усилителе.
Для упрощения описания часть блоков приведена в аналоговом виде, а часть в цифровом.
Ракета, вращающаяся по углу крена (фиг.2), реализующая способ формирования команд управления на ракете, работает следующим образом. В первоначальный момент времени (перед стартом) ракета находится на пусковой установке. Сигнал (например, цифровой) с выхода задатчика начального угла крена 4, величина которого может находиться в интервале 0°…360° и соответствует величине начального угла крена ракеты (φ0) на пусковой установке, поступает на первый вход вычислителя 7. Сигналы со своими знаками (например, цифровые) с первого (например, синусного) и второго (например, косинусного) выходов датчика магнитного поля Земли 3, величина которых соответствует исходной величине угла крена φм, поступают соответственно на второй и третий входы вычислителя 7. Вычислитель 7 в соответствии с выражением 5 и, например, с учетом знаков U1 и U2 вычисляет величину φм в интервале 0°…360°.
Для этого, например, на вход ПЗУ (в вычислителе 7 вход 2), в котором зашита функция arcsinφм, подают двоичное число (без знака), величина которого равна U1/А (выражение 5). На выходе ПЗУ получают величину двоичного числа, соответствующую величине угла φм (в интервале от 0° до 90°). Эту конкретную величину числа преобразуют, путем добавления каждый раз числа, соответствующего 90°, во второе число (в интервале от 90° до 180°), третье (в интервале от 180° до 270°) и четвертое (в интервале от 270° до 360°). Затем эти четыре числа подают на соответствующие первый, второй, третий и четвертый входы четырехвходового мультиплексора. А на его первый и второй входы управления подают знаки, стоящие перед U1 и U2, т.е. логические уровни, соответствующие им (со входов 2 и 3 вычислителя 7). Таким образом, на выходе мультиплексора сформируется двоичное число, соответствующее величине угла φм (без знака) в интервале от 0° до 360°.
Затем вычислитель 7 вычисляет согласно выражению 6 величину числа, соответствующего ±Δφ, которое в двоичном коде записывается, например, в регистр импульсом, формируемым после окончания вычисления, и запоминается до конца полета. Запомненная величина подается на два других ПЗУ, в которых зашиты функции вычисления соответственно sin и cos угла Δφ. На выходах этих двух ПЗУ сформируются два числа (коэффициента) соответственно K1 и К2, например, со своими знаками.
Числа K1 и К2 поступают соответственно на четвертый и третий входы корректора угла крена 6, на первый и второй входы которого поступают соответственно сигналы U1 и U2. В соответствии с тригонометрическими функциями суммы или разности углов (приведенными далее) с учетом выражений 1, 2 и 9 скорректированные исходные значения U1 и U2 (для суммы углов) равны


где φ=φм+ω·t.
Эти значения выставляются до момента, например, схода ракеты с пусковой установки (при t=0) на первом и втором выходах корректора угла крена 6. Аналогично и для разности углов. С момента старта ракета начинает вращаться по углу крена, и на выходе корректора угла крена 6 формируются два сигнала U1 и U2, скорректированные по углу крена, например по фазе.
Сигналы, приведенные на двух соответствующих выходах датчика магнитного поля Земли 3 (эпюры "а" и "б" на фиг.3 при φ0=φм=0°), полностью соответствуют сигналам на выходах корректора угла крена 6, так как Δφ=0°.
При попадании на вход приемника 2 излучения, например, с время импульсной модуляцией он преобразует это излучение в электрические импульсы, которые поступают на вход аппаратуры разделения каналов и декодирования по курсу и тангажу 5, где выделяются величины сигналов по курсу "Z" и тангажу "У" в декартовой системе координат пункта управления. С выхода аппаратуры разделения каналов и декодирования по курсу и тангажу 5 сигналы поступают соответственно на первый и второй входы преобразователя координат 8, на третий и четвертый входы которого подаются сигналы с выходов корректора угла 6, например, через компараторы или триггеры Шмита, каждый из которых стоит в цепи сигналов, например, на первом и втором выходах корректора угла крена либо на соответствующих входах блоков (8 и 10). Каждый компаратор преобразует синусный и косинусный, например, гармонические сигналы в логические, которые приведены на фиг.2 (эпюры "в" и "г") и которые необходимы только для функционирования бортовой аппаратуры управления 1, выполненной как в прототипе. В связи с изложенным выше компараторы или триггеры Шмита на фиг.2 не приведены.
В соответствии с вращением ракеты по крену от 0° до 360° преобразователь координат 8 формирует на выходе в каждую четверть периода вращения ракеты по углу крена, т.е. 0°…90°, 90°…180°, 180°…270° и 270°…360°, команды соответственно, например, "У", "Z", минус "У" и минус "Z" аналогично как в прототипе, которые поступают на первый вход релейного элемента 9.
Сигналы с выходов корректора угла крена 6 (эпюры "в" и "г" на фиг.3) поступают также на соответствующие входы линеаризатора сигнала 10, на выходе которого формируется пилообразное знакопеременное напряжение, которое поступает на второй вход релейного элемента 9.
Из этих двух сигналов релейный элемент 9 формирует релейный знакопеременный (ШИМ) сигнал, величина команды в котором (в каждую четверть кренового периода) определяется отношением положительной и отрицательной величин длительностей (аналогично как в прототипе). Сигнал с выхода релейного элемента 9 поступает на рулевой одноканальный привод 11, который поочередно в каждую четверть кренового периода отрабатывает команду.
Заявленный способ коррекции угла крена реализуется следующим образом. С учетом тригонометрических функций, в данном случае суммы и разности углов [Справочник по радиоэлектронике, т.1, под ред. А.А.Куликовского, М.: Энергия, 1967 г., стр.15]
при Δφ положительном


при Δφ отрицательном


где φ=φм+φм(t) - для ракеты, не вращающейся по углу крена, и φ=φм+ω·t - для ракеты, вращающейся по углу крена, осуществляют корректировку (вращение) исходной фазы входного сигнала φм (при t=0) и текущего сигнала (при t>0) на величину ±Δφ.
В связи с изложенным формируют первое и второе произведения путем умножения первого сигнала (при t=0) U1=A·sin(φм+ω·t) и второго U2=A·cos(φм+ω·t) на величины соответственно косинуса и синуса угла Δφ, на который требуется скорректировать фазу первого сигнала U1 в интервале от 0° до 360°. При этом при положительной величине Δφ они складываются (согласно выражению 15), а при отрицательном - вычитаются (выражение 17).
Аналогичным образом корректируют фазу второго сигнала. Для этого умножают второй сигнал U2=A·cos(φм+ω·t) и первый U1=A·sin(φм+ω·t) на величины соответственно косинуса и синуса корректирующего угла Δφ. При этом при положительной величине Δφ они вычитаются (выражение 16), а при отрицательном - складываются (выражение 18).
Причем первый скорректированный сигнал U1 (в данном случае A·sin(Δφ+φм+ω·t)) и второй - U2 (в данном случае A·cos(Δφ+φм+ω·t)) участвуют в формировании команд управления в двух (соответственно в первой и во второй) взаимно перпендикулярных плоскостях.
В общем случае сигналы U1 и U2 могут быть и не гармоническими, т.к. на траектории полета ракеты ее скорость вращения по углу крена может изменяться.
В корректоре угла крена (фиг.4) в каждом из двух каналов выходы первого 12 и второго 13 (13а из первого и 13б из второго каналов) перемножителей соединены соответственно с первым и вторым входами сумматора 16.
Корректор угла крена, реализующий способ вращения фазы сигнала на ракете, например, вращающейся по углу крена, приведенный на фиг.4, работает следующим образом. В первом канале на первые входы первого 12 и второго 13а перемножителей поступают сигналы соответственно U1=A·sin(φм+ω·t)=A·sinφ и U2=A·cos(φм+ω·t)=A·cosφ. А на вторые входы первого 12 и второго 13а перемножителей поступают числа в двоичном параллельном коде, которые соответствуют коэффициентам передачи К2=cosΔφ (без знака) и K1=sinΔφ (со знаком) и равные например, соответственно 0,87 и 0,5 (при Δφ=±30°).
Таким образом, на выходах первого 12 и второго 13а перемножителей сформируются соответственно два сигнала, например К2·sinφ=0,87 sinφ и K1·cosφ=0,5cosφ (при А=1 и Δφ=30° фиг.5 эпюра "д") или К2·sinφ=0,87 sinφ и - K1·cosφ=-0,5 cosφ (при A=1 и Δφ=-30°, фиг.5 эпюра "е"). На фиг.5 синусоидальный сигнал изображен пунктиром, а косинусоидальный тонкой линией.
Эти два сигнала поступают на первый и второй входы сумматора 16 из первого канала, и на его выходе сформируется скорректированный по фазе (с учетом знака ошибки) сигнал U1, приведенный на фиг.5 (эпюры "д" и "е" толстая линия), согласно выражениям 15 или 17.
Во втором канале на первые входы первого 12 и второго 13б перемножителей поступают сигналы соответственно U2=A·cos(φм+ω·t)=А·cosφ и U1=A·sin(φм+ω·t)=A·sinφ. А на вторые входы первого 12 и второго 13б перемножителей поступают числа в двоичном параллельном коде, которые соответствуют коэффициентам передачи K2=cosΔφ (без знака) и K1=sinΔφ (с обратным знаком) и равные например, соответственно 0,87 и 0,5 (при Δφ=±30°).
Таким образом, на выходах первого 12 и второго 13б перемножителей сформируются соответственно два сигнала, например К2·sinφ=0,87 sinφ и K1·cosφ=- 0,5cosφ (при A=1 и Δφ=30°, фиг.5 эпюра "ж") или К2·sinφ=0,87 sinφ и - K1·cosφ=0,5 cosφ (при A=1 и Δφ=-30°, фиг.5 эпюра "з").
Как следует из изложенного выше все четыре перемножителя: первые из первого и второго каналов 12 и вторые из первого 13а и второго 13б каналов полностью идентичны за исключением того, что перемножитель 13б инвертирует инвертором 15 сигнал, поступающий с выхода умножителя 14 на его вход, что эквивалентно инвертированию знака (полярности) числа K1.
Эти два сигнала поступают на первый и второй входы сумматора 16 из второго канала, и на его выходе сформируется скорректированный по фазе (с учетом знака ошибки) сигнал U2, приведенный на фиг.5 (эпюры "ж" и "з" толстая линия) соответственно для Δφ=30° и -Δφ=30°, согласно выражениям 16 или 18.
Как следует из фиг.5, при изменении амплитуды и (или) частоты сигналов U1 и U2 величина фазы в этих скорректированных сигналах не изменится. Следовательно, данная корректировка фазы сигналов может быть использована, в том числе и для коррекции угла крена, т.е. для негармонических сигналов (т.к. изменение параметров сигналов U1 и U2 происходит одновременно), а также для ракет со стабилизацией крена.
Таким образом, предлагаемая группа изобретений: способ формирования команд управления на ракете, система управления ракетой, вращающейся по углу крена, способ коррекции угла крена и корректор угла крена позволяет повысить надежность и уменьшить габаритно-массовые характеристики за счет упрощения конструкции.
Изобретение относится к области вооружения, а именно к способу и системам управления летательными аппаратами, как вращающимися по углу крена, так и не вращающимися. Задачей, решаемой в изобретении, является повышение надежности и уменьшение габаритно-массовых характеристик. Согласно способу формирования команд в первоначальный момент времени измеряют либо устанавливают заранее известное значение начального угла крена ракеты, а также измеряют в двух взаимно перпендикулярных плоскостях, пересекающих ось ракеты, составляющие магнитного поля Земли, по которым определяют исходный угол крена. Вычисляют и запоминают величину ошибки как разницу исходного и начального углов крена ракеты. Суммируют текущий угол крена ракеты по магнитному полю Земли с величиной ошибки и с учетом величины суммарного угла вырабатывают сигнал крена. В ракету, вращающуюся по углу крена, введены датчик магнитного поля Земли, корректор угла крена и последовательно соединенные задатчик начального угла крена и вычислитель. Предложен способ коррекции угла крена, при котором формируют в каждом из двух каналов для двух плоскостей управления движением ракеты сигналы коррекции соответственно в виде первой и второй алгебраических сумм. В корректор угла крена, в каждый канал введены управляемый инвертор и два перемножителя. 4 н.п. ф-лы, 5 ил.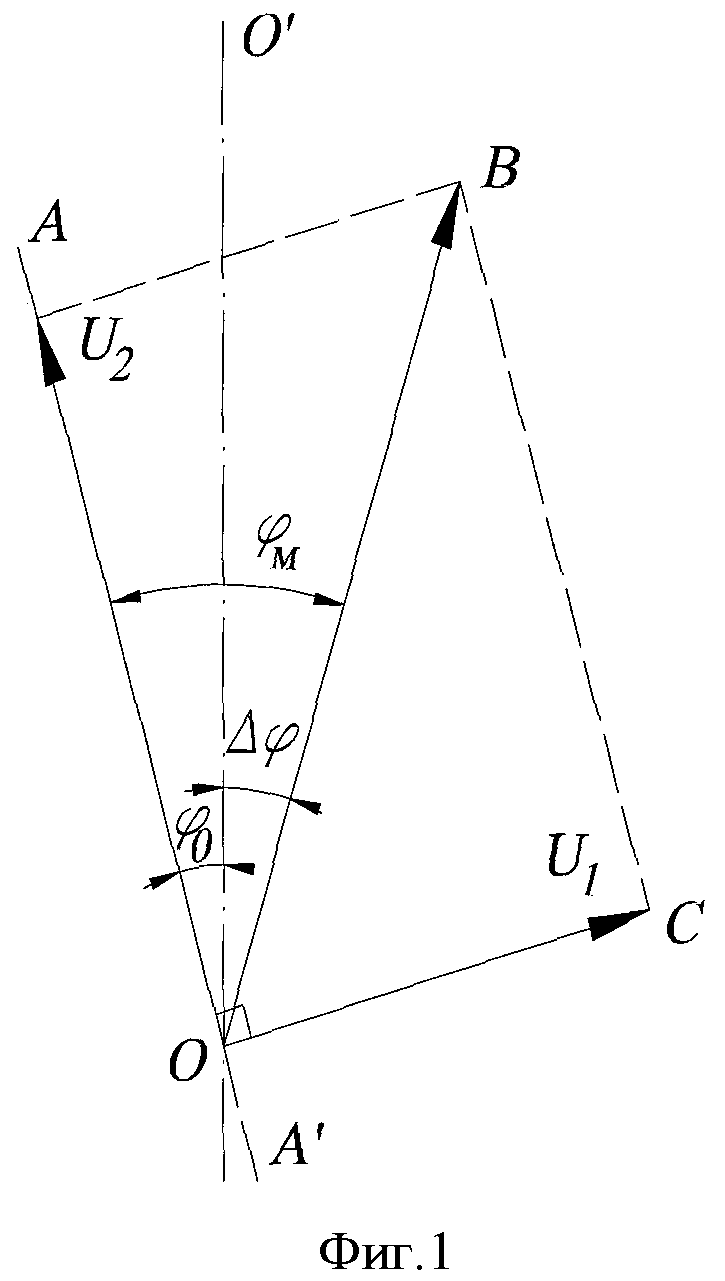
1. Способ формирования команд управления на ракете, включающий выработку сигнала величины угла крена, которым формируют из преобразованных декодированных принимаемых сигналов соответственно по курсу и тангажу команды управления ракетой, отличающийся тем, что в первоначальный момент времени измеряют либо устанавливают заранее известное значение начального угла крена ракеты, а также измеряют в двух взаимно перпендикулярных плоскостях, пересекающих ось ракеты, составляющие магнитного поля Земли, которые преобразуют в два соответствующих электрических сигнала, определяющих исходный угол крена ракеты по магнитному полю Земли, вычисляют и запоминают величину ошибки как разницу исходного и начального углов крена ракеты, суммируют текущий угол крена ракеты по магнитному полю Земли с величиной ошибки и с учетом величины суммарного угла вырабатывают сигнал крена.
2. Ракета, вращающаяся по углу крена, содержащая последовательно соединенные бортовую аппаратуру управления и рулевой привод, отличающаяся тем, что она снабжена последовательно соединенными датчиком магнитного поля Земли и корректором угла крена и последовательно соединенными задатчиком начального угла крена и вычислителем, второй и третий входы которого соединены с первым и вторым выходами датчика магнитного поля Земли, при этом первый и второй выходы вычислителя соединены соответственно с третьим и четвертым входами корректора угла крена, выходы которого соединены соответственно с первым и вторым входами по углу крена бортовой аппаратуры управления.
3. Способ коррекции угла крена ракеты, включающий формирование в каждом из двух каналов для двух плоскостей управления движением ракеты сигналов коррекции соответственно в виде первой и второй алгебраических сумм, состоящих из первого и второго произведений сигналов, отличающийся тем, что вычисляют величину ошибки как разницу между исходным углом крена ракеты, измеренным по магнитному полю Земли и начальным углом крена ракеты, с учетом которой формируют два сигнала коррекции в каждом канале, при этом в первом канале первое и второе произведения формируют умножением первого и второго сигналов коррекции соответственно на косинус и синус текущего угла крена, измеренного по магнитному полю Земли, причем при положительной величине ошибки произведения складывают, а при отрицательной из второго произведения вычитают первое, во втором канале - формируют умножением первого и второго сигналов коррекции соответственно на синус и косинус величины текущего угла крена, измеренного по магнитному полю Земли, причем при положительной величине ошибки из второго произведения вычитают первое, а при отрицательной - произведения складывают.
4. Корректор угла крена ракеты, содержащий два канала, каждый из которых содержит сумматор, отличающийся тем, что снабжен для каждого канала двумя перемножителями, выходы которых соединены соответственно с первым и вторым входами сумматора, при этом первые входы первого и второго перемножителей соответственно из первого и второго каналов объединены и являются первым входом корректора угла крена, первые входы второго и первого перемножителей соответственно из первого и второго каналов объединены и являются вторым входом корректора угла крена, вторые входы первых перемножителей из обоих каналов объединены и являются третьим входом корректора угла крена, вторые входы вторых перемножителей из обоих каналов объединены и являются четвертым входом корректора угла крена, а выходы первого и второго сумматоров являются соответственно первым и вторым выходами корректора угла крена, причем второй перемножитель из второго канала выполнен с инверсией.
| СПОСОБ ФОРМИРОВАНИЯ КОМАНД УПРАВЛЕНИЯ НА РАКЕТЕ, ВРАЩАЮЩЕЙСЯ ПО УГЛУ КРЕНА, СИСТЕМА УПРАВЛЕНИЯ РАКЕТОЙ, СПОСОБ ФОРМИРОВАНИЯ ЛИНЕАРИЗИРОВАННОГО СИГНАЛА И ЛИНЕАРИЗАТОР СИГНАЛА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2004 |
|
RU2282129C1 |
| ПАВЛОВ В.А., ПОНЫРКО С.А | |||
| и ХОВАНСКИЙ Ю.М | |||
| Стабилизация летательных аппаратов и автопилоты | |||
| - М.: Высшая школа, 1964, с.208-210, рис.6.11 | |||
| СИСТЕМА УПРАВЛЕНИЯ СНАРЯДАМИ | 2002 |
|
RU2218540C2 |
| СПОСОБ ФОРМИРОВАНИЯ КОМАНД УПРАВЛЕНИЯ ВРАЩАЮЩЕЙСЯ РАКЕТОЙ, НАВОДЯЩЕЙСЯ ПО ЛУЧУ, И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1997 |
|
RU2114372C1 |
| ЦИФРОВОЙ ИЗМЕРИТЕЛЬ МОЩНОСТИ СИГНАЛА И МОЩНОСТИ ПОМЕХИ В ПОЛОСЕ ПРОПУСКАНИЯ КАНАЛА РАДИОПРИЕМНИКА В РЕАЛЬНОМ МАСШТАБЕ ВРЕМЕНИ | 2011 |
|
RU2472167C1 |
| СПОСОБ И СИСТЕМА ДЛЯ ИНТЕРПРЕТАЦИИ ИСПЫТАНИЙ СВАБИРОВАНИЕМ С ИСПОЛЬЗОВАНИЕМ НЕЛИНЕЙНОЙ РЕГРЕССИИ | 2008 |
|
RU2474682C2 |

