(54) СЛЕДЯЩИЙ МЕХАНИЗМ ДЛЯ ОТМЕРА РАССТОЯНИЯ
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для кнопочного управления электрическим подъемником | 1937 |
|
SU58580A1 |
| СПОСОБ ТОЧНОЙ ОСТАНОВКИ ПОЛА КАБИНЫ ЛИФТА НА УРОВНЕ ПОСАДОЧНОЙ ПЛОЩАДКИ | 2001 |
|
RU2202508C2 |
| ЛИФТ | 1999 |
|
RU2159208C1 |
| Лифт | 1987 |
|
SU1717518A1 |
| СПОСОБ ЗАМЕНЫ ТЯГОВОГО КАНАТА КАБИНЫ ЛИФТА В ШАХТЕ | 2008 |
|
RU2373132C1 |
| ЛИФТ | 1992 |
|
RU2026253C1 |
| Лифтовый подъемник | 1979 |
|
SU937309A1 |
| УСТРОЙСТВО ОТКРЫВАНИЯ И ЗАКРЫВАНИЯ ДВЕРНЫХ СТВОРОК КАБИНЫ ЛИФТА | 1999 |
|
RU2175304C2 |
| Устройство для управления реверсивным электродвигателем строительного подъемника | 1978 |
|
SU753760A1 |
| Система управления грузопассажирским лифтом | 2022 |
|
RU2791781C1 |
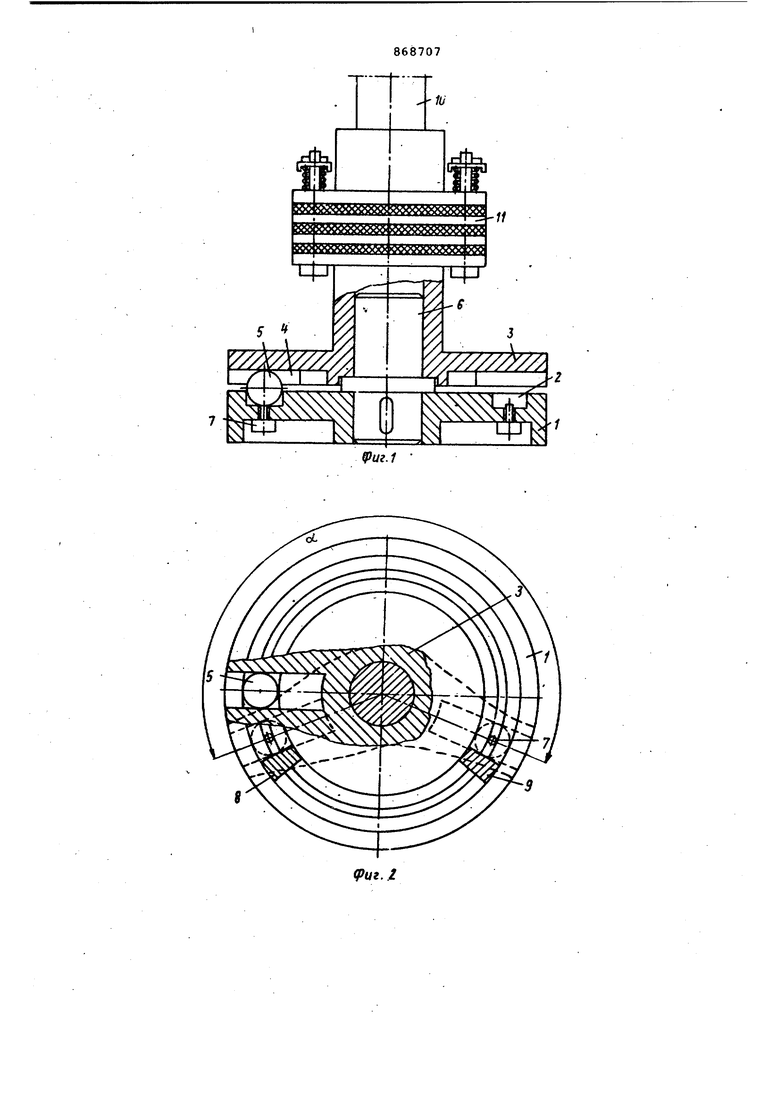
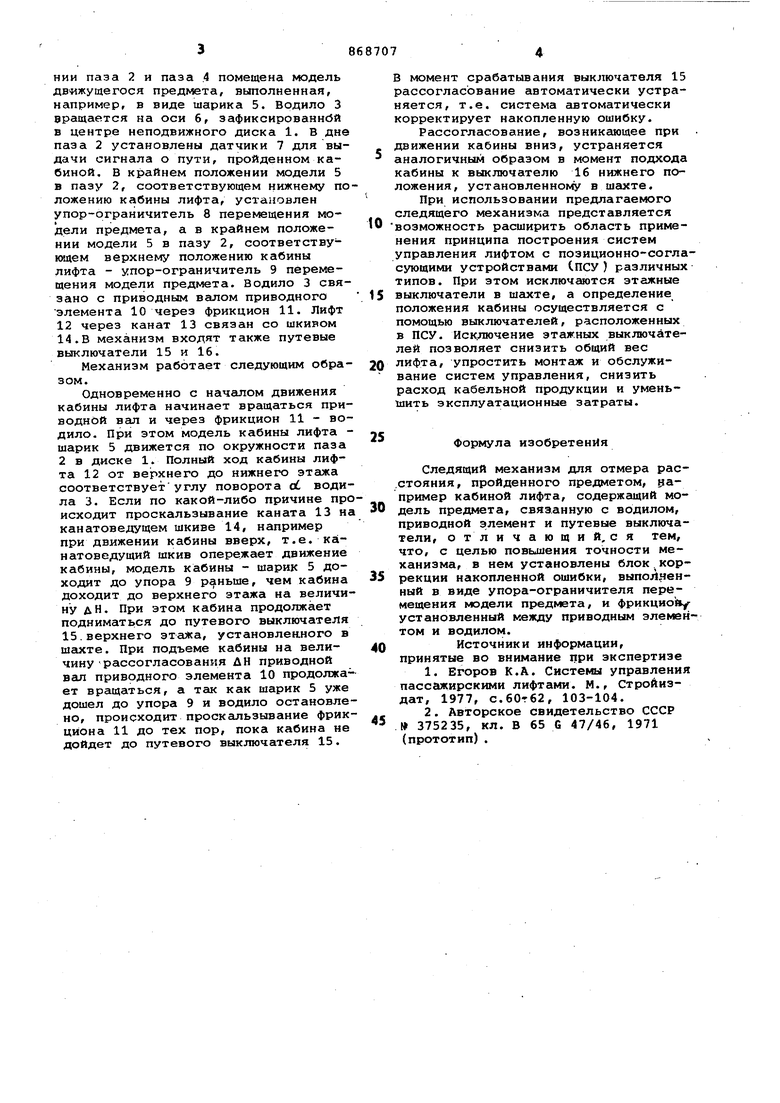
Изобретение относится к автоматическим .системам управления и может применяться для синхронного копирования расстояния, пройденного движущимся предметом, например кабиной лифта. Известен аппарат для отмера расстояния, работающий по принципу синхронного копирования пути, пройденно го предметом. Аппарат состоит из ста нины с закрепленными на ней диском и центральным подшипником, в котором вращается валик, механически связанный через редуктор и гибкий тяговый орган - трос с кабиной. На валике жестко закреплен поводок (водило}, н конце которого установлены фоторезисторы, выполняющие роль модели кабины лифта, перемещаемой в шахте.Поводок на валике в описанной конструк ции играет роль путевого устройства, задающего определенную траекторию движения модели. При движении кабины фоторезистор проходит по тэкружности мимо ламп селекции, ус тановленных в соответствии с пунктами остановки лифта на этажах fll. Известен также синхронно-следящий механизм для отмера расстояния, прой денного предметом, например кабиной лифта/ содержащий .модель предмета, связанную с водилом, приводной элемент и путевые выключатели .21. Точность отмера расстояния в та- ких механизмах недостаточна из-за проскальзывания троса на приводном барабане. Кроме того, в известных устройствах нет механизма автоматической коррекции набегащей ошибки отмера. Цель изобретения - повышение точности отмера расстояния, пройденного кабиной лифта. Поставленная цель достигается тем, что в механизме установлены блок коррекции накопленной ошибки, выполненный в виде упора-ограничителя перемещения модели предмета, и фрикцион, установленный между приводным элементом и водилом. На фиг,1 изображен предлагаемый механизм, разрез; на фиг.2 - то же, вид сверху; на фиг.З - установка механизма на лифте. Следящий механи зм для отмера расстояния содержит неподвижный диск 1 с пазом 2 на его поверхности и вращающееся водило 3 с радиальным пазом 4 на его поверхности. В пересечеНИИ паза 2 и паза .4 помещена модель движущегося предмета, вьтолненная, например, в виде шарика 5. Водило 3 вращается на оси 6, зафиксированнс5й в центре неподвижного диска 1. В дне паза 2 установлены датчики 7 для выдачи сигнала о пути, пройденном кабиной. В крайнем положении модели 5 в пазу 2, соответствующем нижнему положению кабины лифта, установлен упор-ограничитель 8 перемещения модели предмета, а в крайнем положении модели 5 в пазу 2, соответствующем верхнему положению кабины лифта - упор-ограничитель 9 перемещения модели предмета. Водило 3 связано с приводным валом приводного элемента 10 через фрикцион 11. Лифт 12 через канат 13 связан со шкивом 14.В механизм входят также путевые выключатели 15 и 16.
Механизм работает следующим образом.
Одновременно с началом движения кабины лифта начинает вращаться приводной вал и через фрикцион 11 - водило. При этом модель кабины лифта шарик 5 движется по окружности паза 2 в диске 1. Полный ход кабины лифта 12 от верхнего до нижнего этажа соответствуетуглу поворота об водила 3. Если по какой-либо причине происходит проскальзывание каната 13 на канатоведущем шкиве 14, например при движении кабины вверх, т.е. канатоведущий шкив опережает движение кабины, модель кабины - шарик 5 доходит до упора 9 раньше, чем кабина доходит до верхнего этажа на величину дН. При этом кабина продолжает подниматЬ|СЯ до путевого выключателя 15.верхнего этажа, установлеаного в шгисте. При подъеме кабины на величину рассогласования ДН приводной вал приводного элемента 10 продолжает вращаться, а так как шарик 5 уже дошел до упора 9 и водило остановлено, происходит проскальзывание фрикциона 11 до тех пор, пока кабина не дойдет до путевого выключателя 15.
в момент срабатывания выключателя 15 рассогласование автоматически устраняется, т.е. система автоматически корректирует накопленную ошибку.
Рассогласование, возникающее при движении кабины вниз, устраняется аналогичным образом в момент подхода кабины к выключателю 16 нижнего положения, установленному в шахте.
При использовании предлагаемого следящего механизма представляется возможность расширить область применения принципа построения систем упргшления лифтом с позиционно-согласующими устройствами СПСУ ) различных типов. При этом исключгиотся этажные выключатели в шахте, а определение положения кабины осуществляется с помощью выключателей, расположенных в ПСУ. Исключение этажных выключателей позволяет снизить общий вес лифта, упростить монтаж и обслуживание систем управления, снизить расход кабельной продукции и уменьшить эксплуатационные затраты.
Формула изобретения
Следящий механизм для отмера рас.стояния, пройденного предметом, уапример кабиной лифта, содержащий модель предмета, связанную с водилом, приводной элемент и путевые выключатели, отличающий, ся тем, что, с целью повышения точности механизма, в нем установлены блок коррекции накопленной ошибки, выполненный в виде упора-ограничителя перемещения модели предмета, и фрикцио установленный между приводным элементом и водилом.
Источники информации, принятые во внимание при экспертизе
Т
.Hi
