(54) УСТРОЙСТВО ДЛЯ СИНХРОННОГО УПРАВЛЕНИЯ
1
Изобретение относится к автсматике и телемеханике и может найти применение для обеспечения синхронного перемещения или вращения механически не связанных друг с другом исполнительных органов-регуляторов.
Наиболее близким к предлагаемому является устройство, содержащее многообходной датчик угла -синусно-косинусный вращающийся трансформатор, приемник углового перемещения с исполнительным двигателем на валу 1 Статорные обмотки вращающихся трансформаторов- датчиков объединены трехпроводной линией перекрестной связи каналов управления, обмотки возбуждения их подключены к сети переменного напряжения, а квадратурные обмотки, развернутые относительно обмоток возбуждения на 90 - к первым входам соответствующих блоков сравнения. Формирователями синхросигналов в известном устройстве являются сами датчики угла,- а непосредственными источниками синхросигналов - их квадратурные обмотки. Синхросигнал в каждом канале управления пропорционален синусу угла рассогласования между датчиком угла этого Канала и средним угловым положением ПРИВОДАМИ
датчиков всех остальных каналов.
За счет совмещения в каждом датчике угла также функции формирователя синхросигнала благодаря использованию конструктивной особенности синусно-косинусных вращающихся трансформаторов , схшла известного устройства обладает предельной прЬстотой. Однако в большинстве известных мно10гообходных датчиков угла (реостатных, емкостных, пневмогидравлических, фо.тоэлектрических и .) совмещение .приведенных функций неосуществимо, что ограничивает область применения ,
15 устройства,.
Другим недостатком устройства является невозможность оперативного изменения в нем взаимного расположения синхронно управляемых сервопри20водов (связанных с ним исполнительных органов), что ограничивает функциональные возможности устройстра, как элемента системы многосвяэного регулирования. Необходимость в коррек25ции положения сервоприводов или их датчиков положения возникает nj; замене одного из перечисленных элементов на резервный, как правило, не вполне идентичный заменяемому даже в устройстве с фиксированным от30
носительным сдвигом синхронно управляемых исполнительных органов.
Цель изобретения - расширение .функциональных возможностей и области применения.
Поставленная цель достигается тем что в известное устройство, содержащее в каждом канале управления последовательно соединенные многообходной датчик угла, фазовращатель, формирователь синхросигналов и блок сравнения, второй вход которого подключен к источнику управляющего сигнала, введены три сумматора, три элемента сравнения и в каждый канал управления два вентЪля, причем три выхода фазовращателей соединены с первыми, вторыми и третьими входами формирователей синхросигналов и со входами соответственно первого, второго и третьего сумматоров, выход первого сумматора подключен к первым входам первого и третьего элемента сравнения, и к четвертым входам формирователей синхросигналов, выход второго сумматора - к первому входу второго и к второму входу первого элементов сравнения и к пятым входам формирователей синхросигналов, выход третьего сумматора - к вторым входам второго и третьего элементов сравнения и к шестым входам формирователей синхросигналов, седьмые, восьмые и девятые входы которых подключены к выходам соответствующих элементов сравнения, и в каждом канале управления выход формирователя синхро-сигналов соединен через первый вентиль с управляющим входом фазовращателя, а выход блока сравнения через второй вентиль - с соответствующим приводом.
Кроме того, формирователь синхросигналов состоит из четвертого, пятого и шестого элементов сравнения, трех умножителей, выходами подключенных к четвертому сумматору, выход которого подключен к в 51ходу формирователя синхросигналов, первые входы элементов сравнения подключены к первому, второму и третьему входам формирователя синхросигналов, четвертый,пятый и шестой, входы которого подключены к вторым входам элементов сравнения, выходы которых подключены соответственно к первым входам блоков умножения, вторые входы которых подключены к седьмому, восьмому и девятому входам формирователя синхросигналов.
Устройство работоспособно при использовании в сервоприводах многообходных датчиков любого известного типа, но в устройствах промышленной автоматики наибольшее применение в качестве датчиков угла нашли сельсины. Фазовращатель может быть выполнен в виде дифференциального сельсина.
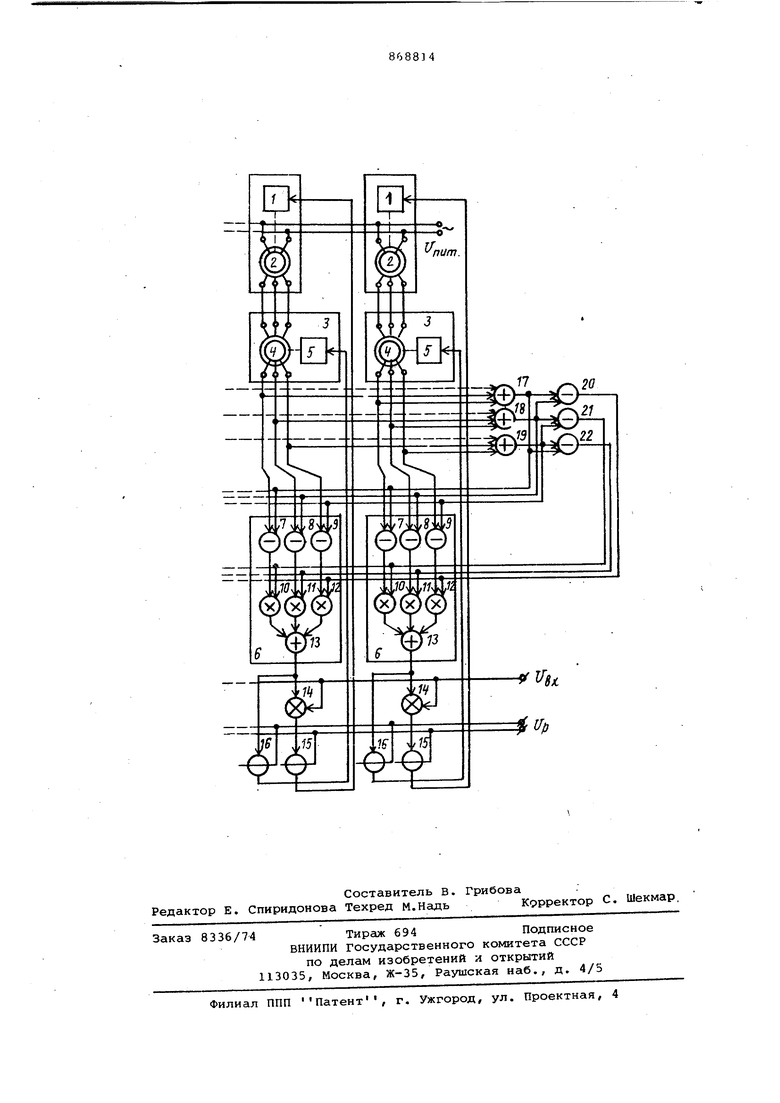
На чертеже показано предлагаемое устройство.
Каждый канал управления (на чертеже показаны лишь два канала) содержит сервопривод 1 с многообходньам датчиком 2 углового положения его 5 рабочего вала - сельсином, фазовращатель 3 выходных сигналов датчика, выполненный на дифференциальном сельсине 4 и кд1нематически связанном с ним реверсивном двигателе 5, форми0 .рователь б синхросигнала, выполненный на элементах сравнения 7,8 и 9, умножителях 10,11 и 12 и сумматоре 13, блок 14 сравнения и два вентиля
15и 16. Общие для всех каналов цепи перекрестной связи выполнены на
сумматорах 17, 18 и 19 и элементах сравнения 20,21 и 22.
Обмотка возбуждения сельсина-датчика 2 подключена к сети переменного
Q напряжения Опмт, а обмотка синхронизации - к первичной обмотке дифференциального сельсина 4. Обмотка синхронизации сельсина 2, а также первичная и вторичная обмотки дифференциального сельсина 4 имеют по три вывода - по числу пространственно-модулируемых параметров датчика. Первые входы элементов 7,8,9 подключены соответственно к первому, второму и третьему выводам вторичной обмотки сельсина 4, а выходы - к первым входам элементов соответственно 10,11,12. Входы сумматора 13 подключены к выходам элементов 10,11,12, а выход - к сигнальному входу вентиля 16 и к первому входу блока 14, второй вход которого подключен к источнику управляющего сигнала Ug. Выход вентиля 16 подключен к входу реверсивного двигателя 5. Вход венn ТИЛЯ 15 подключен к выходу блока 14, а выход - к входу сервопривода 1. Запирающие входы вентилей 15 и 16 подключены к источнику сигнала Up, определяющему режим работы устройства. При предлагаемое устройство находится в режиме синхронного управления сервоприводами по сигналу Ug, тбгда все вентили 15 открыты, а вентили 16 - закрыты. При устройство переходит в режим ав0 топодстройки и индивидуального управления сервоприводами (цепи индивидуального управления сервоприводами не показаны), тогда вентили
16открыты, а вентили 15 - закрыты. 5 Входы сумматора 17 подключены к
первым выводам всех сельсинов 4, а выход - к первому входу элемента 20 и ко второму входу элемента 22. Входы сумматора 18 подключены ко втоQ рым выводам всех сельсинов 4, а
выход - к первому входу элемента 21 и ко второму входу элемента 20. Входы сумматора 19 подключены к третьим вьшодам всех сельсинов, а выход - к первому входу элемента 22 и к второму входу элемента 21. Выходы сумматоров 17,18 и 19 подключены также ко вторым входам элементов 7,8 и 9 соответственно всех каналов управления, а выходы элементов 20,21 и 22 - ко вторым входам элементов 12,10 и 11 соответственно всех каналов управления. Устройство работает следующим о разом. - В момент включения сервоприводы находятся в некотором произвольном состоянии, при котором сельсины-дат чики 2 занимают угловое положение d а дифференциальные сельсины 4 - ,2... - порядковый номер канала управления. При этом, если сигнал Up 0, вентили 16 открыты, вентили 15 закрыты и сервоприводы 1 остаются неподвижными (их входы закры ты) . Напряжение на первом, втором и третьем выходах j-ro (любого) сел сина-датчика 2 записаны в виде , Unsind.: u5j Uosin (d.j+120); (1 U UoSin ((i..,+240 ) ; a одноименные напряжения на выходах дифференциального сельсина 4 в виде Щ KUosin(cl.j -Pj ); U/,j- KUoSin(oLj + 120); (2 Oaj KUosin(clj -(bj + 240 ), где Uo - амплитуда огиба вщей напряж ния на фазах обмотки синхронизгщии датчика 2, а К - коэффициент трансформгщии между первичной и вторичной обмотками сельсина 4. В соотве ствии с логикой работы устройства, записываем выражения для напряжений на выходах сумматоров 17,18 и 19: - пр.UiП5./ЗГ п 2,3,4... - число каналов уп равления; выражения для напряжений на выходах элементовсравнения 20, 21 и 22: и - ua; 24 ua - иэ; из - и. Выражения для напряжений на выходах элементов сравнения 7,8 и 9: Ил) - ; U2i- Uj, Ufj Uftj- из Выражения для напряжений на выхода умножителей 10,11 и 12: 1MI1Д1 Uij 0%; uTu и43 (6) -,161 Выражение для напряжения на выходе , сумматора 13 j-ro канала: и, u-. .из7 (7) После последовательной подставки значений переменных fUjj/Ujj (2) в выражения (3) - (7), получается следующая сигнала Ucj : Uoj Kc.Uosinaj, (8) где Kji - коэффициент пропорционсшьности, а UJ - разность между значением угла (d,; -1Ь ), отнеденного-ос сельсинам 2 и 4 данного (j-ro) канада, и средним значением от углов такого же вида, по отнесенным к парам сельсинов 2 и 4 всех каналов управления в целом. Напряжение в кеокдом (j-ом) канале управления рассматриваемого устройства является синхросигналом и имеет такую Же форму, как и синхросигналы в известном устройстве. Существенная разница состоит в том, что в предлагаемом устройстве этот синхросигнал получен от многообходных датчиков угла любого типа. Таким образом, установлено, что при включении устройства в режиме автоподстройки (Up 0)j на выходах формирователей 6 всех каналов управления появляются синхросигналы вида (8). Так как вентили 16 в данном режиме открыты, то синхросигналы поступают к входам реверсивных двигателей 5. Двигатели приходят в движение, поворачивая роторы сельсинов 4 до тех пор, пока каждый из них не установится в положение, при котором справедливо равенство ....)n- С момента выполнения равенства (9) синхросигношы на выходах формирователей 6 становятся равными нулю и движение реверсивных двигателей 5 прекращается. Устройство готово к переходу в синхронного управления сервоприводами 1. При изменении сигнала режима на Up 1 вентили 16 запираются, вентили 15 открываются и входы сервоприводов 1 оказываются подключенными к выходам соответствующих блоков 14 сравнения Сигнал на выходе каждого из этих блоков равен либо алгебраической сумме сигнала Uj и , либо является некоторой нелинейной функцией этих сигналов в зависимости от логики работы блоков 14. Практически, при увеличении модуля U вьаие определенного порогового значения вся группа сервоприводов приходит в движение./ Вследствие некоторой нгеидентичности сервоприводов или различия нагрузок мгновенные скорости двйжёния их оказываются разными. Равенство (9) нарушается и на выходах формирователей 6 появляются синхросиг- налы. При этом полярность их такова, что результирующие сигналы на входах отстающих сервоприводов увеличивстотся, на входах опережаю уменьшаются, скорости сер. воприводов выравниваются и движение их, в среднем, происходит синхронно При уменьшении управляющего сигнала ниже .порогового значения сервоприводы останавливаются. Взаимное расположение синхронно управляемых сер воприводов в прилагаемом чертеже может быть сравнительно быстро изменен.о в любых пределах. Для этого устройство переводится в режим авто подстройки, а сервоприводы - по цепям индивидуального управления (не показаны) - устанавливаются в требу емое положение. При этом реверсивные двигатели 5 практически мгновенно обрабатывают возникающий разбаланс в парах датчик - дифференциальный сельсин до выполнения равенства(9 Таким образом, после перевода устройства в режим синхронного управле ния движение сервоприводов происходит уже с вновь установленным их взаимным расположением. Приемники угловых перемещений 3 выходных сигналов датчиков выполнены полностью на элементах электроники. Элементы 7,8 и 9 сравнения выполнены на трансформаторах напряжения. При этом первый вывод первич ной обмотки каждого трансформатора является первым входом соответствую щего элемента сравнения, а выводы вторичной обмотки - его выходом. Вторые выводы первичных обмоток тра форматоров - вторые входы всех одно именных элементов сравнения - электрически объединены. Предлагаемое изобретение расширя функциональные возможности устройства за счет более оперативного изменения взаимного расположения управляемых сервоприводов, дает возможность получить синхросигналы от реостатных, емкостных, пневмогидрав лических фотоэлектрических датчиков угла, что расширяет область примене ния устройства. Формула изобретения 1. Устройство для синхронного уп равления приводами, содержащее в каждом канале управления последовательно соединенные многообходной датчик угпа, фазовращатель, формиI р.ователь синхросигналов и блок срав нения, второй вход которого подключен к источнику управляющего сигнала, отличающееся тем, что, с целью расширения функциональных возможностей и области применения устройства в него введены три сумматора, три элемента сравнения и в каждый канал управления два вентиля, причем три выхода фазовращателей соединены с первыми, вторыми и третьими входами формирователей .синхросигналов и со входами соответственно первого, второго и третьего сумматоров, выход первого сумматора подключен к первым входам первого и третьего элемента сравнения, и к четвертым входам формирователей синхросигналов, выход второго сум-матора - к первому входу второго и к второму входу первого элементов сравнения и к пятым входам формировате- . лей синхросигналов, выход третьего сумматора - к вторым входам второго и третьего элементов сравнения и к шестым входам формирователей синхросигналов, седьмые, восьмые и девятые входы которых подключены к выходам соответствующих элементов сравнения, и в каждом канале управления выход формирователя синхросигналов соединен через первый вентиль с управляющим входом фазовращателя, а выход блока сравнения через второй вентиль - с соответствующим приводом. 2.Устройство по п.1,о т ли ч а ющ е е с я тем,что формирователь синхросигналов состоит из четвертого, пятого и шестого элементов сравнения, трех умножителей, выходами подключенных к четвертому сумматору, выход которого подключен к выходу формирователя синхросигналов, первые входы элементов сравнения подключены к первому, второму и третьему входам формирователя синхросигналов, четвертый,пятый и шестой, входы которого подключены к вторым входам элементов сравнения, выходы которых подключены соответственно к первым входам блоков умножения, вторые входы которых подключены к седьмому, восьмому и девятому входам формирователя синхросигналов. Источники информации, принятые во внимание при экспертизе 1. Авторское свидетельство СССР № 441581, кл. G 08 С 19/44, 1972.
| название | год | авторы | номер документа |
|---|---|---|---|
| Многодвигательный электропривод | 1983 |
|
SU1280690A1 |
| Измерительное устройство к балансировочному станку | 1983 |
|
SU1146562A1 |
| Преобразователь угол-фаза-код | 1983 |
|
SU1153335A2 |
| Следящая система | 1979 |
|
SU903803A2 |
| Электромеханическое устройство синхронной связи | 1972 |
|
SU441581A1 |
| Электромеханическое устройство синхронной связи | 1976 |
|
SU652599A1 |
| Устройство для управления синхронной машиной | 1980 |
|
SU888322A1 |
| Преобразователь угол-фаза-код | 1980 |
|
SU858051A1 |
| Электропривод с частотно-токовым управлением | 1990 |
|
SU1742974A1 |
| РАДИОЛОКАЦИОННАЯ СТАНЦИЯ | 1993 |
|
RU2037842C1 |