Изобретение относится к электромеханическим устройствам синхронной связи и может быть использовано в области автоматики и телемеханики, где требуется обеспечить синхронное и синфазное перемещение механически не связанных один с другим исполнительных органов.
Известны устройства аналогичного назначения, Ьбеспечивающие синхронное перемещение исполнительных органов (двигателей), однако каналы управления этих устройств или неравнозначны (один ведущий, другие - ведомые) или обладают достаточно высокой вероятностью самопроизвольного движения всей группы синхрьнно-связанных объектов при отказах в цепях синхронизации 1.
Известно электромеханическое устройство синхронной связи, содержащее источник командных сигналов и каналы управления, каждый из которых содержит блок коммутации, подключенный к сервоприводу, механически соединенному с датчиком рассогласования, и элемент сравнения командного сигнала и сигнала рассогласования (синхросигнала).
Устройство работает следующим образом. При появлении командного сигнала на движение всей группы сервоприводов системы в заданном направлении сигнал на выходе элемента сравнения, любого из каналов становится равным алгебраической сумме этого командного сигнала и сигнала рассогласований на выхбДё соответствующего датчика. При этом направление и скорость движения бсей группы сервоприводов системы определяются командным сигналом, а отработка отклонения сервоприводов друг относительно друга - сигналами рассогласования 2.
Недостатком, известного устройства является то, что кома1НДный сигнал и сигналы рассогласования датчиков воздействуют на блоки коммутации силовых цепей сервоприводов одинаковым образом, т. е. сервопривод может двигатьс я в рйвШй степени как под воздействием только командного. Так и сигнала рассогласования. Таким образом, при некоторых вйдах отказа иепей и элементов формирования сигналов рассогласования (вызывающих ложное появление последних) возможно са.мопроизвольное Движение в различном направлении всей
rpyWrrbi серп.л.риводОв мри нулеЕЮм комгшдном сигнале.у
Целью предлагаемого изобретения является устранение иедостатка прототи ffа,т.&. исключение возможности самопроизвольного движения сервоприводов системы, вызванного отказами датчиков и цепей передачи сигналов рассогласования. Это позволит повысить надежность устройства синхронной связи.
Поставленная цель достигается тем, что каждый канал управления устройства синхронной связи содержит (вместо элемента сравнения) блок управления коэффициентом передачи командного сигнала, первый вход и вЫход которого соединены соответственное выходом датчика рассогласования и входом блока коммутации, а второй вход - с источником командных сигналов. При этом движение сервоприводов возможно только при наличии командного сигнала. Сигналы рассогласоватшя в предложенномустройстве гтредназначены только для изменения параметров ценей прохождения командного еиг traTia uсами привести в движение сервоприводы не могут. Таким образом, синхронизация сервоприводов в предложенной схеме осуществляется благодаря перераспределению командного сигнала между каналами управления.
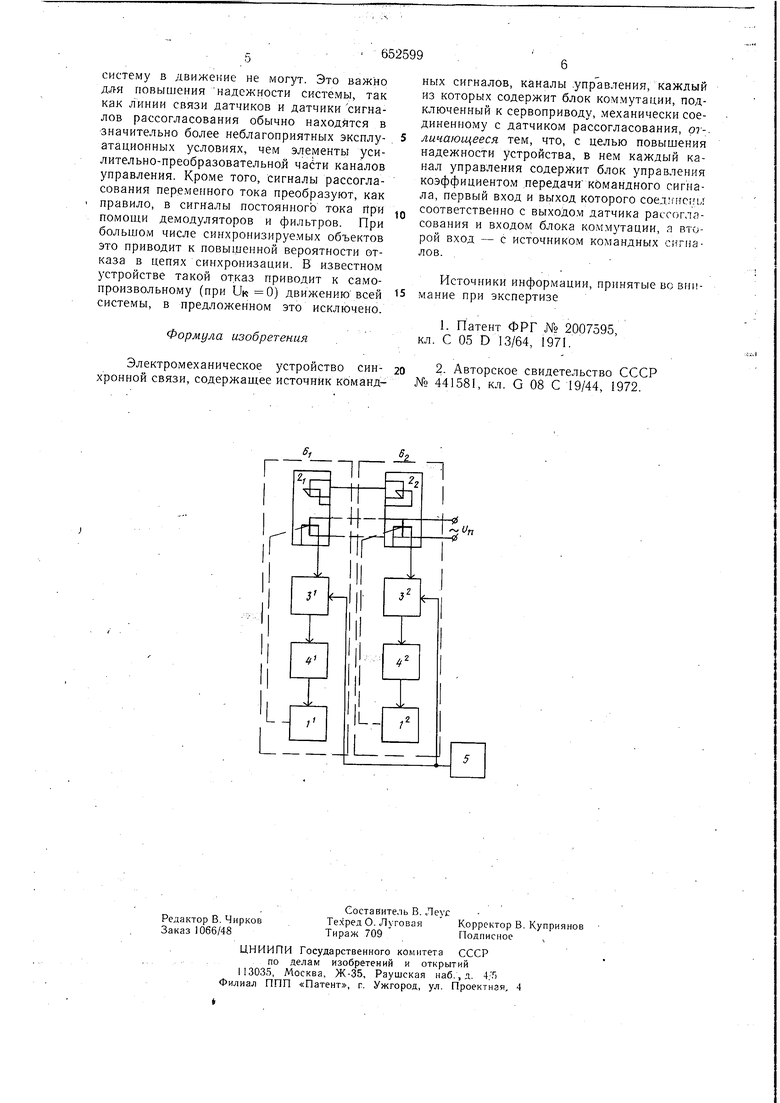
На чертеже приведена схема двухканального устройства синхронной связи. Каждый канал устройства содержит сервопривод 1, датчик 2 рассогласования, блок 3 управления коэффициентом передачи ко.мандного сигнала и блок 4 коммутации силовых ценей этого сервопривода.
Датчик рассогласования представляет еобой синусно-косинусный вращающийся трансформатор, о.бмотка синхронизации которого сннфазно подключена к аналогичной
-обмотке датчнка другого канала, обмотка возбуждения подключена к сети переменного напряжения, а квадратурная обмотка - источник сигнала рассогласования- к управляюи1ему входу 5 блока 3. Входы б блока управления 3 устройства подключены к
Источнику командного сигнала, а выходы через блоки коммутации силовых цепей сервоприводов - к входам соответствующих сервоприводов. Конструктивно блоки 3 могут бытьвыполнены, нанример, в виде унравляемых делителей напряжения, усилителей с управляемыми коэффициентами усиления, пороговых устройств с управляемыми зонами нечувствительности. Кроме того, в зависимости от назначения и требуемой динамики устройства в целом коэффициенты передачи блоков 3 по командному сигналу могут зависеть не толькЬ от знаков и модулей сигналов рассогласования, но и от соotfrStireiaift этих величин по сравнению со знаком и моду.чем командного сигнала. Однако, несмотря на многообразие возмож 111ЛХ вариантов построения управляемых звеньев, качественная сторона процесса синхронизации остается неизменной. Поэтому в дальнейшем можно считать, что передаточная функция блока управления имеет вид:
К i а + b Uci,
где а и b-постоянные, Ud-сигнал рассогласования датчика i-ro канала с учетом знака его по отношению к командному сигналу UK (здесь i 1,2). Можно считать также, что скорость движения сервоприводов пропорциональна сигналам на выходах блоков 3, т. е.UiBbixi Ki UR .
Представим, что в исходном состоянии системы датчики 2 находятся, в согласованном положении, а нагрузка на валах сервоприводов датчдков. одинакова. Тогда сигналы рассогласования датчиков Uci сигналь на выходах блоков 3 Ьвых ивыха KiUK а UK и сервоприводы вращаются синхронно.
Предположим, что нагрузка на валу одного из сервоприводов системы внезапно увеличилась, а у другого осталась неизменной. Тогда при прежнем сигнале на выходах блоков 3 скорость движения сервопривода с увеличенной нагрузкой уменьшается, согласование датчиков 2 нарушается и на квадратурных .обмотках датчиков появится сигнал рассогласования. При этом сигнал рассогласования датчка «отстающего (с увеличенной нагрузкой) сервопривода будет иметь тот же знак, что и знак командного сигнала, а сигнал рассогласования датчика «опережающего - противоположный. Таким образом, сигнал на выходе блока 3 канала с «отстающим сервоприводом Uebix-i Ki UK 1 (а + bUc i) UK , a на выходе блока 3 канала с «онережающим сервоприводом
ивыха К UK 1 (а - б Uc7) UK .
Из выражений для ивых и ивыха видно, что сразу же после приращения нагрузки на валу «отстающего сервопривода напряжение на входе последнего (при UK const) начинает увеличиваться, а напряжение на входе «опережаюндего - уменьн ается. Поэтому после окончания переходного процесса скорости вра цения обоих сервонрнводов вновь выравниваются.
Можно также показать, что если в исходном состоянии описываемого устройства датчики 2 находились в несогласованном положении, то после появления UK согласование каналов было бы достигнуто аналогичным образом.
Таким образом,синхронизация сервоприводов в предложенном устройстве достигается благодаря перераспределению командного сигнала между каналами, управления за счет изменения коэффициентов передач блоков 3 в зависимости от величин и знаков сигналов рассогласования. Сами сигналУ рассогласования (при U)0) нривести систему в движение не могут. Это важно дл-я повышения надежности системы, так как линии связи датчиков и датчики сигналов рассогласования обычно находятся в значительно более неблагоприятных эксплуатационных условиях, чем элементы усилительно-преобразовательной чабти каналов управления. Кроме того, сигналы рассогласования переменного тока преобразуют, как правило, в сигналы постоянного тока при помощи демодуляторов и фильтров. При большом числе синхронизируемых объектов это приводит к повышенной вероятности отказа в цепях синхронизации. В известном устроистве такой отказ приводит к самопроизвольному (при ) движениювсей системы, в предложенном это исключено. Формула изобретения . Электромеханическое устройство синхронной связи, содержащее источник командных сигналов, каналы .управления, каждый из которых содержит блок коммутации, подключенный к сервоприводу, механически соединенному с датчиком рассогласования, от-, личающееся тем, что, с целью повышения надежности устройства, в нем каждый канал управления содержит блок управления коэффициентом передачи командного сигнала, первый вход и выход которого соед; ге Ь соответственно с выходо.м датчика рассогласования и входом блока коммутации, я втхОрой вход - с источником командных сигналов. Источники информации, принятые во внимание при экспертизе 1. Патент ФРГ № 2007595, кл. С 05 D 13/64, 1971. 2. Авторское свидетельство СССР № 441581, кл. G 08 С 19/44, 1972.
| название | год | авторы | номер документа |
|---|---|---|---|
| Электромеханическое устройство синхронной связи | 1972 |
|
SU441581A1 |
| Устройство для синхронного управления приводами | 1979 |
|
SU868814A1 |
| МНОГОКАНАЛЬНЫЙ РЕЗЕРВИРОВАННЫЙ СЕРВОПРИВОД | 1969 |
|
SU244837A1 |
| СИСТЕМА УПРАВЛЕНИЯ ЛЕТАТЕЛЬНОГО АППАРАТА | 1986 |
|
SU1372816A1 |
| Многодвигательный электропривод | 1981 |
|
SU1023613A2 |
| СИСТЕМА УПРАВЛЕНИЯ ЗАКРЫЛКАМИ САМОЛЕТА | 1992 |
|
RU2065377C1 |
| Устройство управления движением транспортного средства | 1990 |
|
SU1837328A1 |
| СПОСОБ СИНХРОНИЗАЦИИ ДВИЖЕНИЯ ВЫХОДНЫХ ЗВЕНЬЕВ НЕСКОЛЬКИХ ОБЪЕМНЫХ ГИДРОДВИГАТЕЛЕЙ | 2022 |
|
RU2778591C1 |
| СПОСОБ ФОРМИРОВАНИЯ 4-КАНАЛЬНОЙ ОТКАЗОУСТОЙЧИВОЙ СИСТЕМЫ БОРТОВОГО КОМПЛЕКСА УПРАВЛЕНИЯ ПОВЫШЕННОЙ ЖИВУЧЕСТИ И ЭФФЕКТИВНОГО ЭНЕРГОПОТРЕБЛЕНИЯ И ЕГО РЕАЛИЗАЦИЯ ДЛЯ КОСМИЧЕСКИХ ПРИМЕНЕНИЙ | 2011 |
|
RU2449352C1 |
| Устройство синхронизации в одночастотных многоканальных адресных системах с временным разделением каналов | 1989 |
|
SU1811018A1 |
Г
