1
Изобретение относится к области телемеханики и может найти применение в тех областях техники, где требуется обеспечить синхронное и синфазное линейное паремещание или вращениа механически друг с другом не связанных исполнительных органов, таких, например, как вентилей, заслонок, сервоприводов и т.п.
Известно электромаханическое устройство синхронной связи, содержащее в каждом канале управле-. ния сервопривод, кинематически связанный с ротором синусно-косинусного вращающегося трансформатора, и блок сравнения, один вход которого подключен к источнику управляющего сигнала, в выход через блок коммутации силовых цеП8И сервопривода - к входу сервопривода. Статорные обмотки трансформатора соединены параллельно, а обмотки возбуждения подключены к сети переменного напряжения.
Однако в таком устройстве синхронной связи имеется значительное число блоков, общих для всех ка- : налов управления исполнительными ; органами.
Цель изобретения - упрощение устройства.
Для этого в предлагаемом уст;ройстве квадратурные обмотки трансформатора подключены к вторым входам соответствующих блоков сравнения.
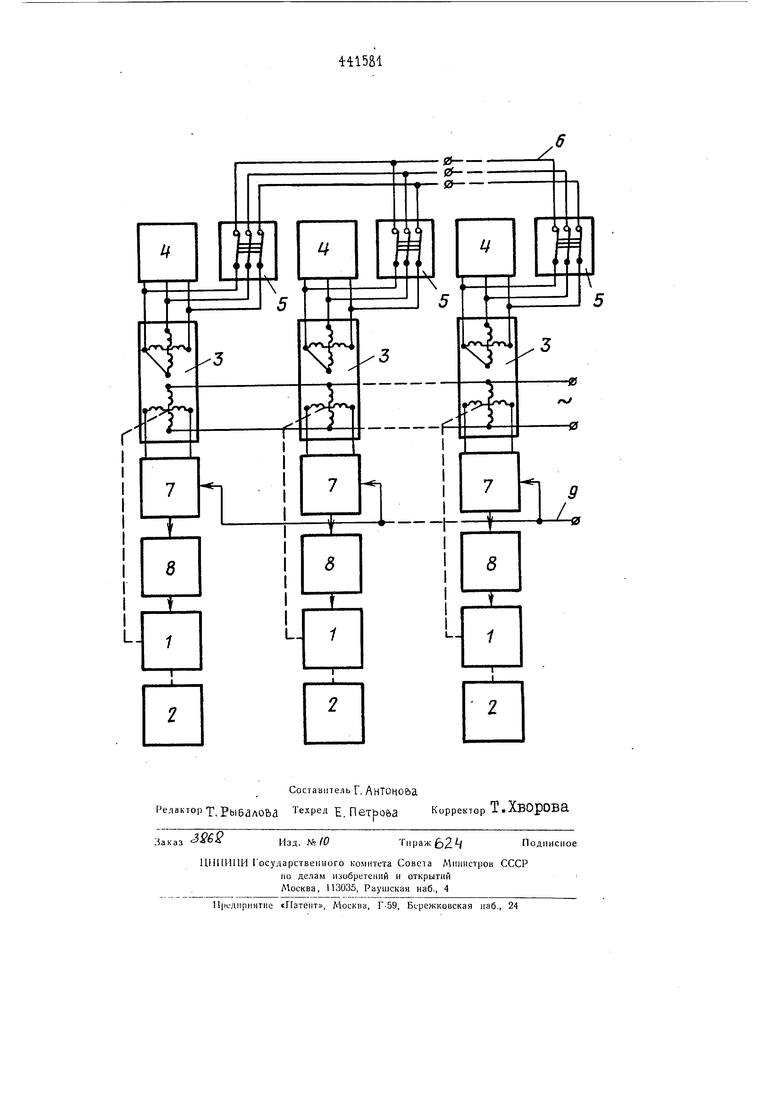
На чертеже показана функциональная схема электромеханического устройства синхронной связи.
Устройство содержит по крайней мере два канала управления исполнительными органами. Каждый канал управления имеет сервопривод I, кинематически связанный с исполнительным органом 2 и датчиком 3 его положения - поворотным синусно-косинусным трансформатором, вторичные обмотки которого подсоединены непосредственно к индивидуальному указателю 4 положения ис|Полнительного органа 2 и синфазно С одноименными обмотками датчиков i положения прочих каналов управления системы, через переключатель 5 режима управления исполнительным органом 2 т к трехпроводной линии б связи, объединяющей все каналы управления в единую многосвязную систему синхронной связи. Обмотка возбуждения датчика 3 канала управления подключена к сети переменного напряжения, а ее квадратурная обмотка - к входу коррекции блока 7 сравнения, выход которого подключен к блоку 8 коммутации силоБЫх цепей сервопривода I, На вторые входы блока 7 всех каналов управления по шине 9 подается командный сигнал о направлении .и требуемой скорости перемещения всей группы исполнительных органов системы. В предлагаемом устройстве отсутствуют блоки, общие для всех каналов управления исполнительными органами, а сами каналы управления равноценвы. Каждый канал имеет два режима управления исполнительным органом: режим синхронной связи, когда вторичные обмотки датчика 3 через переключатель 5 подсоединены к линии ь связи и режим ручного управления, когда вторичные обмотки датчика отсоединены переключателем от линии связи (цепи сигналов ручного управления исполнительными органами на чертеже не показаны). В момент включения системы в режиме синхронной связи каналов управления при наличии рассогласования между положениями их исполнительных органов и отсутствии командного сигнала на шине 9, на квад ратурной обмотке любого из датчиков 3 образуется напряжение, однозначно соответствующее величине и знаку отклонения связанного с ним исполнительного органа от среднего арифиатичвского значения из положений остальных исполнительных органов системы. Это напряжение через блоки 7 и 8 вызывает отработку сервопривода, перемещение исполнительного органа, связанного с ним, и поворот ротора соответствующего датчика до момента согласования, когда напряжение на квадратурной обмотка датчика становится равным нулю. Реально отработка сервоприводов, а значит и перемещение исполнительных органов системы прекращается при уменьшении напряжений на квадратурных обмотках датчиков ниже зоны нечувствительности блоков 8, Величина зоны нечувствительности блоков 8 определяет величину максимального рассогласования между положениями исполнительных органов в установившемся состоянии, В рассматриваемом режиме синхронной связи указатели 4 включены фактически параллельно друг другу, дублируют друг друга и индицируют среднее арифметическое значение из положений всех исполнительных органов системы. При появлении командного сигнала на шине 9 сигнал на выходе любого из блоков 7 сравнения становится равным алгебраической сумме этого командного сигнала и сигнала коррекции на квадратурной обмотке соответствующего датчика 3, причем величина, направление и скорость перемещения всей группы исполнительных органов системы определяется командным сигналом, а отработка отклонения исполнительных органов относительно друг друга - сигналами коррекции с датчиков 3. В режиме ручного управления тем или иным исполнительным органом системы вторичные обмотки связанного с ним-датчика отключены от линии связи переключателем. При этом напрянение на квадратурной обмотке датчика равно нулю 1поскольку ось ее перпендикулярна к оси обмотки возбузкдбния), а указатель индицирует действительное положение исполнительного органа выбранного напала упоавления„ пркдакт изиБ№1Ения Блзктромеханическое устройство синхронной связи, содержащее в каждом канале управления сервопривод, кинематически связанный с ротором синусно-косинусного вращаюегося трансформатора и блок сравнения, один вход которого подклк ен к источнику управляющего сигнаа, а выход через блок коммутации иловых цепей сервопривода - к вхоу сервопривода, статорные обмотки инусно-косинусных вращающихся рансформаторов соединены паралельно, а обмотки возбуждения подлючены к сети перемонного напряжеия, отличающееся тем, то, с целью упрощения устройства, нем квадратурные обмотки синусноосинусных вращающихся трансформаторов подключены к вторым входам соответствующих блоков сравнения.
| название | год | авторы | номер документа |
|---|---|---|---|
| Электромеханическое устройство синхронной связи | 1976 |
|
SU652599A1 |
| Устройство для синхронного управления приводами | 1979 |
|
SU868814A1 |
| Устройство для реверсивного бесщеточного возбуждения синхронной машины | 1989 |
|
SU1713076A1 |
| УСТРОЙСТВО ДЛЯ КОНТРОЛЯ СЛЕДЯЩЕЙ СИСТЕМЫ | 1979 |
|
SU826287A1 |
| УСТРОЙСТВО Для КОНТРОЛЯ СИНХРОННО-СЛЕДЯЩИХСИСТЕМ | 1969 |
|
SU251649A1 |
| Устройство реверсивного безщеточного возбуждения синхронной машины | 1986 |
|
SU1361704A1 |
| Автономный одноточечный инклинометр | 1988 |
|
SU1564331A1 |
| Вентильный электродвигатель | 1989 |
|
SU1767638A1 |
| Следящий вентильный электропривод | 1982 |
|
SU1241400A1 |
| Преобразователь угла поворота вала в код | 1978 |
|
SU752428A1 |